Файл: Методические указания и контрольные задания для студентов заочников.docx
ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 25.10.2023
Просмотров: 134
Скачиваний: 2
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
Методические указания к выполнению задания 3
К решению этих задач следует приступить после изучения тем “Простейшие движения твердого тела”, “Основные понятия и аксиомы динамики”, ”Метод кинетостатики, Работа и мощность” уяснения приведенных ниже методических указаний и разбора примеров. Напоминаем, что для поступательного движущегося тела применимы все формулы кинематики точки. Рассматривая вращательное движение твердого тела необходимо уяснить что вращение тела характеризуется угловыми величинами (угол поворота ф угловая скорость w и угловое ускорение Е), а отдельные точки вращательного тела совершают криволинейное движение (по окружностям) и их движение характеризуется линейными величинами (путь- S, скорость- V и ускорение -аv an).
Активные (движущие силы). Среди них большое место занимает сила тяжести Fт:

Где m - масса,кг;
g= 9.81 м/c2 – ускорение свободного падения
Сила инерции Fин , в общем случае Fин = m
 a
a При равномерном вращении, при а = v2 /R

Нормальная реакция Fн: Чаще всего основной связью при движении тел является поверхность движения. Ее действие и определяет нормальная реакция, направленная перпендикулярно поверхности. Нормальная реакция уравновешивает силы, вызывающие давление на поверхность – силу тяжести, инерции и другие.
Сила трения скольжения Ff
Ff = f
FHСила трения качения Fk = fк
FНГде f; fk – коэффициент скольжения и качения f = 0,05….1; fk= 0,001….0,2 .
При решении задач необходимо иметь в виду что в случае равномерного движения действующая на тело система сил является уравновешенной, а в случае неравномерного – неуравновешенный. В первом случае уравнение равновесия статики тела применимы непосредственно во втором – лишь при условии добавления к заданной системе сил силы инерции

вектор которой направлен противоположно вектору ускорения (такой метод решения называется методом кинетостатики).
При решении задач с применением метода кинематики рекомендуется такая последовательность:
1 Выделить точку движение которой рассматривается в данной задаче;
2 Выяснить какие активные силы действуют на точку и изобразить их на рисунке;
3 Освободить точку от связей заменив связи их реакциями;
4 К образовавшейся системе сил добавить силу инерции, которая направлена по линии вектора ускорения точки, но в противоположную сторону;
5 Выбрать расположение осей координат и составить два уравнения проекции всех сил на эти оси (
 );
);6 Решив уравнение определить искомые значения величин.
Пример 3. Определить недостающие из перечисленных параметров маневра автомобиля: путь S, время t скорости V1 и V2,ускорение - a, движущую силу F, силу инерции Fин и трения Ff Ffk ,нормальную реакцию Fn, мощность на передвижение Pн, эффективную (полную) мощность P.
Известные параметры и дополнительные данные взять из таблицы.
| Маневр | S, m | V1 | V2 | t,c | a, м/c2 | fk | ή | m, кг | |||||
| м/c | |||||||||||||
| Разгон | | 0 | 25 | 10 | | 0,05 | 0,94 | 1000 | |||||
Решение
1 Объектом приложения является автомобиль размерами которого можно пренебречь то есть представить его материальной точкой.
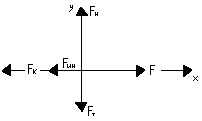
2 Векторная схема сил включают векторы сил: движущей силы F, силы инерции Fин, трения качения Fk, тяжести FT, нормальной реакции FH, рис.10.
3.Уравнение кинетостатики:

Cоставляем уравнение для рис.10

.
Выражаем составляющие уравнений через параметры движения и дополнительные данные.
Сила инерции

Из формулы ускорения
Сила сопротивления качению

Где fK –коэффициент трения, fK=0,05-1
Но Fн=Fт-mg, тогда Fк= fK
mg=0,05 1000 9,8 =490H.
1000 9,8 =490H.Так как F – Fин –Fк =0, то F = Fин +Fк =2500+490=2990Н
Путь, пройденный автомобилем при разгоне

Мощность на передвижение

Мощность полная
ЗАДАНИЕ 3.
Определить недостающие из перечисленных параметры маневра автомобиля: путь S, время t, скорости V1 и V2, ускорение а, движущую силу F, силу инерции Fин, силы трения Ff, Fк, нормальную реакцию Fn, мощность на передвижение Рн, полную (эффективную) мощность Рэ.
Известные параметры и дополнительные данные взять из таблиц 1.3.
| Маневр | S, м | V1, м/c | V2, м/c | t, c | f | fk | n | m, кг | R, м | ||
| разгон | торможение | поворот | |||||||||
| Вариант | |||||||||||
| 00 01 02 10 11 12 20 21 22 30 31 32 40 41 42 50 51 52 60 61 62 70 71 72 80 81 82 90 91 92 | 03 04 05 13 14 15 23 24 25 33 34 35 43 44 45 53 54 55 63 64 65 73 74 75 83 84 85 93 94 95 | 06 07 08 09 16 17 18 19 26 27 28 29 36 37 38 39 46 47 48 49 56 57 58 59 66 67 68 69 76 77 78 79 86 87 88 89 96 97 98 99 | 100 - 100 - - - - - 100 100 | 20 19 - 25 21 24 30 0 0 0 | 20 19 - 0 0 0 7 25 20 - | - 3 4 - - - - 7 - 20 | 0.4 0.5 0.4 0.5 0.4 0.6 0.3 - - - | 0.03 0.02 0.01 - - - - 0.01 0.02 0.01 | 0.95 0.94 0.94 0.90 0.91 0.92 0.93 0.95 0.96 0.95 | 1000 900 1200 2000 1800 1500 1000 2000 3000 4000 | 10 10 15 - - - - - - - |
Методические указания к выполнению задания 4
Механические передачи чаще всего передают вращательное движение, изменяют направление, частоту, плоскость вращения, вращающий момент.
Частота вращения измеряется в об/мин (n) и в радианах/с
 . Во втором случае ее еще называют угловой скоростью. Между ними существует следующая зависимость:
. Во втором случае ее еще называют угловой скоростью. Между ними существует следующая зависимость:
Имеется в виду, что в одном обороте 2π=6,28 радиан, а в одной минуте 60 секунд.
Изменение частоты вращения выражают через передаточное отношение u12.
где
 - угловая скорость ведущего вала;
- угловая скорость ведущего вала;n1 - частота вращения ведущего вала;
 - угловая скорость ведомого вала;
- угловая скорость ведомого вала;n2 - частота вращения ведомого вала.
Положительное значение принимается, если направление вращения валов меняется. Передаточное отношение зависит от размеров деталей передач ( зубчатых колес, шкивов и др.): большую частоту имеет меньшая деталь, меньшую частоту- большая, поэтому передаточное отношение через размеры выглядит так:
Где Z – число зубьев зубчатого колеса, звёздочки;
D - диаметр шкива, зубчатого колеса, звездочки.
Для многоступенчатой передачи передаточное отношение определяется перемножением передаточных чисел ступеней

Если вспомнить (задание 3), что мощность Р - параметр, полученный как произведение параметра действия на параметр быстроты движения, а параметр действия при вращении- вращающийся момент М и параметр быстроты вращения -угловая скорость
 ,то получим
,то получим
Коэффициент полезного действия – передачи показывает отношение мощности
 ведомого вала к мощности—ведущего вала
ведомого вала к мощности—ведущего вала
Потери мощностиР1-Р2 необходимы для преодоления сопротивления в зацеплении, подшипниках, смазке, перемещений продуктов износа, смазки.
Рекомендуется при определении полезной мощности принимать следующие значения кпд, обусловленные степенью точности и чистоты обработки выпускаемых деталей:
-пары подшипников -

-цепной передачи -

-ременной-

-зубчатой -

-червячной-

Учитывая что
 получим
получим
Это означает, что изменение вращательного момента измеряется также передаточным отношением.
Коэффициент полезного действия привода, состоящего из нескольких передач(ступеней), определяют произведением КПД всех передач

Где 1,2…i- номера передач;
n-количество пар подшипников в приводе.
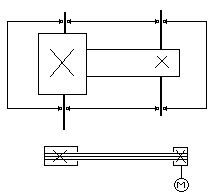
Пример 4. Определить угловые скорости, вращающие моменты, передаточные отношения, мощности, КПД привода (рис. 11), если передаточное отношение редуктора u23= 2.8, мощность электродвигателя Р1= 7 кВт, частота вращения его вала
 750 об/мин., диаметры шкивов
750 об/мин., диаметры шкивов D1= 80 мм, D2= 160 мм. Описать назначение, устройство, принцип работы привода.
Решение.
-
Определяем передаточное отношение ремённой передач
U12= up=
Общее передаточное отношение привода
U13= u12 * u23 = 2* 2,8= 5,6.
-
Частота вращения ведущего и ведомого вала привода.