Файл: Курсовой проект защищен с оценкой (подпись преподавателя) (и о. фамилия) 20 г.docx
ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 25.10.2023
Просмотров: 64
Скачиваний: 2
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
| Программное обеспечение | DWD3.exe |
| Число шатунно-поршневых групп, М | 4 |
| Число тактов в двигателе, N | 4 |
| Угол поворота кривошипа до начала такта расширения, UP[K] (градусов) | |
| UP[K1] | 0 |
| UP[K2] | 180 |
| UP[K3] | 360 |
| UP[K4] | 540 |
| Угол наклона оси абсцисс относительно правого горизонта, Q (градусов) | 90 |
| Длина кривошипа, АК (метров) | 0,06 |
| Длина шатуна, А2 (метров) | 0,204 |
| Положение центра масс шатунов, Z | 0,4 |
| Угловая скорость кривошипа, WK (рад/с) | -157 |
| Число положений для расчета, N | 24 |
| Момент инерции масс кривошипа, РО (кг·м2) | 0,03 |
| Масса шатуна, М2 (кг) | 2,6 |
| Момент инерции масс шатуна, JS (кг·м2) | 0,02164 |
| Масса поршня, М3 (кг) | 3,3 |
| Диаметр поршня, DP (м) | 0,124 |
| Максимум индикаторного давления, UN (МПа) | 5 |
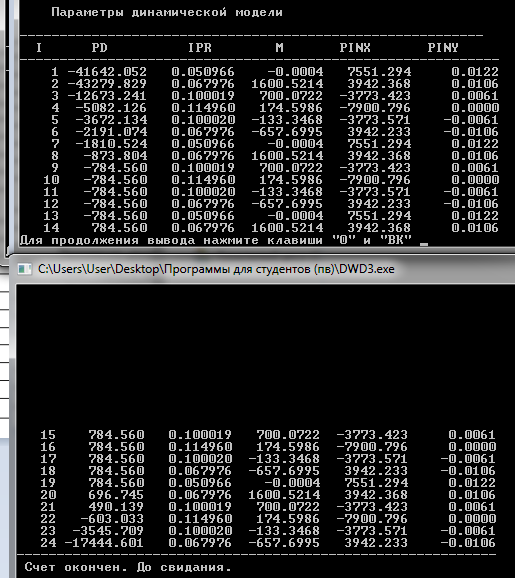
PD – сила давления на поршень В
IPR – приведенный момент инерции масс механизма
M – приведенный момент движущих сил
PINX – проекция главного вектора сил инерции на ось X
PINY – проекция главного вектора сил инерции на ось Y
3. Построение диаграммы энергомасс для одного цикла
Строим график приведенных моментов движущих сил в масштабе.
 ;
;  ;
; ;
;  ;
;Таблица 1
| Положение | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | 12 |
 , мм , мм | 0 | 150 | 65,61 | 16,36 | -12,5 | -61,64 | 0 | 150 | 65,61 | 16,36 | -12,5 | -61,64 |
Продолжение таблицы 1
| Положение | 13 | 14 | 15 | 16 | 17 | 18 | 19 | 20 | 21 | 22 | 23 | 24 | |
 , мм , мм | 0 | 150 | 65,61 | 16,36 | -12,5 | -61,64 | 0 | 150 | 65,61 | 16,36 | -12,5 | -61,64 | |
Графически проинтегрируем график
 ,
,Н=65 мм;
 ;
;Шкала на графике А:

Графически продифференцируем график
 , получим график привиденного момента сил сопротивления
, получим график привиденного момента сил сопротивления  .
.Для построения графика
 используем соотношение:
используем соотношение:
Строим график приведенного момента инерции масс механизма в масштабе.

Таблица 2
| | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | 12 |
 | 0,00 | 39,87 | 114,99 | 150 | 114,99 | 39,87 | 0,00 | 39,87 | 114,99 | 150 | 114,99 | 39,87 |
Продолжение таблицы 2
| | 13 | 14 | 15 | 16 | 17 | 18 | 19 | 20 | 21 | 22 | 23 | 24 |
 | 0,00 | 39,87 | 114,99 | 150 | 114,99 | 39,87 | 0,00 | 39,87 | 114,99 | 150 | 114,99 | 39,87 |
Используя графики
 и
и  , строим неполную диаграмму энергомасс.
, строим неполную диаграмму энергомасс.4. Определение истинного закона движения ведущего звена
 ;
; ;
; ;
; ;
;

 ;
; ;
;где




 ;
; ;
; =
=
Определим угловую скорость в каждом положении и строим график
 :
:
 ;
;


Таблица 3
| Положение |  |  |  |  |  |
| 1 | 1 | 0 | 0,142981157 | 156,0761 | 0,0 |
| 2 | 11,02 | 39,87 | 0,145142806 | 157,2515 | 28,8 |
| 3 | 24,64 | 114,99 | 0,146453222 | 157,9598 | 46,2 |
| 4 | 26,4 | 150 | 0,144856045 | 157,0961 | 25,0 |
| 5 | 22,9 | 114,99 | 0,145613976 | 157,5065 | 35,1 |
| 6 | 12,7 | 39,87 | 0,145983575 | 157,7063 | 40,0 |
| 7 | 1,63 | 0 | 0,143302865 | 156,2516 | 4,3 |
| Продолжение таблицы 3 | |||||
| 8 | 24,83 | 114,99 | 0,146544863 | 158,0092 | 47,4 |
| 9 | 25,95 | 150 | 0,144642603 | 156,9803 | 22,2 |
| 10 | 22,51 | 114,99 | 0,145425869 | 157,4048 | 32,6 |
| 11 | 12,27 | 39,87 | 0,145768378 | 157,59 | 37,1 |
| 12 | 1,23 | 0 | 0,143098606 | 156,1402 | 1,6 |
| 13 | 10,15 | 39,87 | 0,144707407 | 157,0155 | 23,0 |
| 14 | 24,43 | 114,99 | 0,146351933 | 157,9051 | 44,8 |
| 15 | 25,55 | 150 | 0,144452877 | 156,8773 | 19,6 |
| 16 | 22,11 | 114,99 | 0,145232939 | 157,3003 | 30,0 |
| 17 | 11,87 | 39,87 | 0,145568195 | 157,4818 | 34,5 |
| 18 | 1 | 0 | 0,142981157 | 156,0761 | 0 |
| 19 | 9,75 | 39,87 | 0,144507224 | 156,9068 | 20,4 |
| 20 | 24,02 | 114,99 | 0,14615418 | 157,7984 | 42,2 |
| 21 | 25,18 | 150 | 0,14427738 | 156,782 | 17,3 |
| 22 | 21,52 | 114,99 | 0,144948367 | 157,1461 | 26,2 |
| 23 | 12,06 | 39,87 | 0,145663282 | 157,5332 | 35,7 |
| 24 | 1 | 0 | 0,142981157 | 156,0761 | 0,0 |
5. Определение момента инерции в каждом положении маховика и его размеров


 ;
; 
 ;
; 

Принимаем


Необходимая мощность двигателя:

Литература
1. Закабунин В.И. Теория механизмов и машин. Структура и анализ механизмов: Учебное пособие / Алт. гос. техн. ун-т им. И.И.Ползунова. – Барнаул: Изд-во АлтГТУ, 2004.-406с.
2. Закабунин В.И. Теория механизмов и машин. Синтез механизмов: Учебное пособие / Алт. гос. техн. ун-т им. И.И.Ползунова. – Барнаул: Изд-во АлтГТУ, 2006.-222с.
3. Кофанов С.П. Использование замкнутых векторных контуров и ЭВМ при анализе рычажных механизмов: Учебное пособие / Алт. гос. техн. ун-т им. И.И.Ползунова. – Барнаул: Изд-во АлтГТУ, 2008.-59с
4. Андросов А.П., Быков В.А. Силовой анализ рычажных механизмов: методические указания к выполнению курсового проекта / А.П. Андросов, В.А. Быков; Алт. гос. техн. ун-т им. И.И.Ползунова. – Барнаул: Изд-во АлтГТУ, 2005.-26с.
5. Быков А.Е., Кофанов С.П. Синтез зубчатых механизмов: Метод. указания к курсовому проекту по теории механизмов и машин для студентов механической специальной очной и вечерней форм обучения. / Алт. политехн. ин-т им. И.И. Ползунова. - Барнаул: Б.и., 1989-32с., [1] л. вкл.