ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 26.10.2023
Просмотров: 202
Скачиваний: 7
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
-
найдем значение постоянного тока намагничивания, эквивалентное пе-ременному току статора, в соответствии с (5.6):
| п = | √ | 3 | ≈ 1,225 ∙ ; | |
| | | | ||
| √2 | | |||
| | | | ||
-
для найденных значений относительной скорости, критического момента двигателя в режиме динамического торможения и момента сопротивления оп-ределим относительную скорость, для чего решим уравнение (5.3) относитель-но К:

| = | кдт | + | | кдт | − | ; | (5.10) | |
| | | | | |||||
| К | | | | | | | ||
| из уравнения (4.74) определяем добавочное сопротивление: | | | ||||||
| доб = К( | н + | н) − | ; | (5.11) | | |||
сопротивление динамического торможения, непосредственно включаемое
-
роторную цепь двигателя, находится по формуле:
доб = доб , Ом . (5.12)

Очевидно, что включение сопротивления в роторную цепь двигателя воз-можно только для двигателей с фазным ротором.
27
- 1 2 3 4 5 6 7 8 9 ... 16
РАСЧЕТ ПЕРЕХОДНЫХ ПРОЦЕССОВ И НАГРУЗОЧНЫХ ДИАГРАММ ЭЛЕКТРОПРИВОДА
6.1. Двигатель постоянного тока независимого возбуждения
-
курсовой работе должны быть рассчитаны переходные процессы тока, электромагнитного момента и угловой скорости двигателя за цикл работы электропривода. Метод расчета переходных процессов выбирается в соответст-вии с типом электропривода, формой механической характеристики производ-ственного механизма и двигателя.
Переходные процессы электропривода с двигателем постоянного тока не-зависимого возбуждения при линейных статических характеристиках двигателя
-
производственного механизма рассчитываются по формулам:
| | = | уст + | нач − уст ∙ | | ; | | | | (6.1) | ||||
| | = | уст + | нач − | уст | ∙ | | | | | ; | (6.2) | ||
| | = | уст + | нач − | уст | ∙ | , | (6.3) | ||||||
| где | нач − начальное значение тока двигателя, А; | | | | |||||||||
| | уст − установившееся значение тока | двигателя | | при | моменте нагрузки | ||||||||
| = | уст, А; | | | | | | | | | | | ||
уст − установившаяся угловая скорость двигателя при моменте нагрузки
-
уст, рад с;
нач − начальное значение угловой скорости, рад с;
-
− электромеханическая постоянная времени электропривода, с.
Расчет электромеханических постоянных времени ТМ для каждой из рео-статных характеристик (см. рис. 6.1) осуществляется в соответствии со сле-дующими выражениями:
| Т | = | ∙ ∆ | ,илиТ = | ∙ | яц | , | (6.4) | |
| ∆ | | | | |||||
| | | | | | | | |
где ∆ , ∆ − соответствующие друг другу приращения скорости и момента на i-й характеристике;
яц − суммарное сопротивление якорной цепи на соответствующей ха-
28
| рактеристике, Ом; | | − коэффициент ЭДС, В ∙ с рад; | − суммарный момент | | |||||||||
| инерции, приведенный к валу двигателя, кг ∙ м ; | | | |||||||||||
| | | | | = ∙д+м∙ | 1 | , | (6.5) | | |||||
| | | | | | | ||||||||
| где = | | 1,05 ÷ 1,3 | | | ст.р | | | ||||||
| ( | | ) | − коэффициент, учитывающий момент инерции редуктора; | | |||||||||
| | | | | | | | | | |||||
дв − момент инерции двигателя, кг ∙ м ;
-
момент инерции производственного механизма, кг ∙ м ; ст.р − стандартное передаточное отношение редуктора.
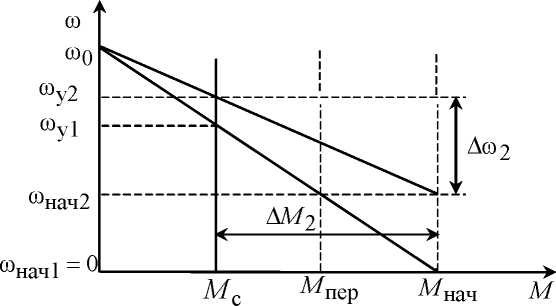
Рис. 6.1. Пусковые механические характеристики ДПТ независимого возбуждения
| Время | пп работы двигателя на | -й характеристике, при изменении момен- | | ||||||||
| та в пределах от | нач до кон определяется по формуле: | | | ||||||||
| | | пп=м∙ | | нач − | уст | , | (6.6) | | |||
| | | | кон − | уст | | ||||||
| | | | | | | | |||||
| где нач, | кон − | начальное и конечное значения моментов двигателя постоян- | | ||||||||
| ного тока, взятые из графика механической характеристики. | | ||||||||||
| Так, например, для определения времени переходного процесса при пуске | | ||||||||||
| двигателя из неподвижного состояния до скорости нач | (см. рис. 6.1) в урав- | | |||||||||
| нение (6.6) необходимо подставить | нач = пуск, кон = | пер и уст = с. | | ||||||||
-
значение момента в точке физически установившегося режима рабо-ты электродвигателя.
29
6.2. Асинхронный двигатель
Поскольку математическое описание электромеханических переходных процессов асинхронного электропривода на линейном участке его механиче-ской характеристики повторяет описание аналогичных процессов привода по-стоянного тока, то для расчета кривых I (t), M (t) и ( ) асинхронного электро-привода можно воспользоваться формулами (6.1), (6.2), (6.3).
Если переходный процесс протекает на нелинейном участке механической характеристики асинхронного двигателя, то его определяют, например, так на-зываемым методом пропорций. Сущность этого метода заключается в замене бесконечно малых приращений скорости и времени малыми конечными приращениями ∆ и ∆ .
График нелинейной механической характеристики асинхронного двигате-
ля д = ( ) и линейной механической характеристики механизма = ( )
приведен на рис. 6.2.
Рис. 6.2. Метод конечных приращений для построения графиков
переходных процессов
Построения для расчета переходных процессов методом конечных прира-щений ведутся в следующей последовательности:
• строятся механические характеристики электродвигателя д = ( ) и производственного механизма = ( );
-
графически находится динамический момент электропривода:
дин( )= д( )− ( );
• кривую динамического момента дин( ) заменяют ступенчатой с
участками:
30
| | | дин.ср. = | дин. | + дин. | , | (6.7) | | ||
| где дин. | | | 2 | | |||||
| | | | | | | ||||
| , дин. | − максимальное и минимальное значения динамиче- | | |||||||
| ского момента на -м участке. Точность расчетов тем выше, | чем на большее | | |||||||
| число участков разбита кривая дин( ); | | | | | |||||