ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 08.11.2023
Просмотров: 409
Скачиваний: 4
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
СОДЕРЖАНИЕ
1 ПОСТАНОВКА ЗАДАЧИ АВТОМАТИЗАЦИИ ГАЗОВОЗДУШНОГО
3 РАЗРАБОТКА СТРУКТУРНЫХ СХЕМ СИСТЕМЫ
4 РАСЧЕТ АСР ОБЩЕГО ВОЗДУХА КОТЕЛЬНОЙ
Произведём оценку качества переходного процесса по каналу задания корректирующего регулятора:
Произведём оценку качества переходного процесса по каналу задания стабилизирующего регулятора:
Произведём оценку качества переходного процесса по каналу задания стабилизирующего регулятора:
оптимизации процесса горения в этих схемах, так же как и в схеме «топливо — воздух», применяется корректирующий импульс по содержанию свободного кислорода О2 в дымовых газах.
На единицу расхода различного по составу топлива необходимо различное количество воздуха, но его потребность на единицу тепла, выделяющегося при сгорании, не изменяется. Поэтому если оценивать тепловыделение в топке по расходу пара и изменять расход воздуха в соответствии с изменениями расхода пара, то тем самым можно поддерживать оптимальный избыток воздуха. Этот принцип регулирования подачи воздуха используется в схемах пар— воздух (рисунок 4, б) [1, стр.181].
Поддержание избытка воздуха по соотношению тепло — воздух и в особенности пар — воздух отличается простотой и надежностью, но не является точным. Этот недостаток устраняется в системе регулирования экономичности, действующей, например, по схеме задание— воздух с дополнительной коррекцией по О2 (рисунок 4, г) [1, стр.183], в которой регулятор подачи воздуха изменяет его расход по сигналу от главного или корректирующего регулятора давления 5. Сигнал, пропорциональный расходу воздуха рв.п, как и в других схемах, во-первых, устраняет возмущения по расходу воздуха, не связанные с регулированием экономичности (включение или отключение систем пылеприготовления), во-вторых, способствует стабилизации самого процесса регулирования подачи воздуха, так как служит одновременно сигналом жесткой отрицательной обратной связи. Введение дополнительного корректирующего сигнала по содержанию О2 повышает точность поддержания оптимального избытка воздуха в любой системе регулирования экономичности. Добавочный корректирующий регулятор 4 по О2 в схеме регулирования задание—воздух непосредственно управляет подачей воздуха при топочных возмущениях и обеспечивает поддержание заданного избытка воздуха в зависимости от нагрузки агрегата.
Регулирование разрежения обычно осуществляется посредством изменения количества уходящих газов, отсасываемых дымососами. При этом их производительность можно регулировать:
Как объект регулирования разрежения топка обладает благоприятными динамическими свойствами — значительным самовыравниванием и практически отсутствием запаздывания.
Вследствие благоприятных динамических свойств топки в схеме ACP разрежения используются как ПИ-регуляторы, так и И-регуляторы. Наибольшее распространение получила схема регулирования разрежения с одноимпульсным ПИ-регулятором (рисунок 5) [2, стр.275].
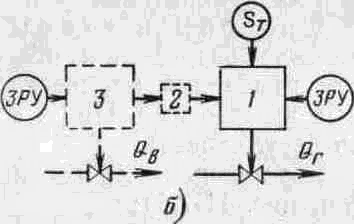
Рисунок 5 - Структурная схема регулирования разрежения
Требуемое значение регулируемой величины устанавливается с помощью ручного задатчика ЗРУ регулятора разрежения 1.
Включения регулятора воздуха 3 приводит к временному нарушению материального баланса между поступающим воздухом и уходящими газами. При работе парогенератора в регулирующем режиме могут происходить частые изменения тепловой нагрузки и, следовательно, изменения расхода воздуха. Для предупреждения частого возникновения такого небаланса и увеличения быстродействия регулятора разрежения рекомендуется ввести в ПИ-регулятор разрежения дополнительное исчезающее воздействие от регулятора воздуха через устройство динамической связи 2.
В качестве устройства динамической связи, в частности, может быть использована RС-цепочка, входной сигнал которой поступает на вход регулятора разрежения лишь в момент включения регулятора воздуха. Устройство динамической связи обладает направленностью действия, т. е. ведомым регулятором может быть только регулятор разрежения. Динамическая связь позволяет компенсировать все возмущения в топке, которые возникают при работе регулятора воздуха.
По рассмотренным выше аналогиям структурных схем разработаем структурные схемы АСР общего воздуха, АСР разрежения в топке котла и АСР давления первичного воздуха.
Так как главной задачей АСР водогрейного котла является поддержание температуры сетевой воды на выходе из котла, то нагрузкой для котла является температура сетевой воды. Структурная схема АСР общего воздуха будет выглядить по аналогичной схеме по принципу «нагрузка-воздух» с коррекцией по О2 (рисунок 4, г). Структурная схема АСР общего воздуха для нашего варианта представлена на рисунке 6, а.
Структурная схема АСР разрежения для нашего варианта представлена на рисунке 6, б. Схема выполнена без динамической связи от регулятора воздуха к регулятору разрежения, так как динамическую связь используют в системах регулирования разрежения котельных агрегатов большой производительности .
Структурная схема АСР давления первичного воздуха для нашего варианта представлена на рисунке 6, в.
а) б) в)
Рисунок 6 - Структурные схемы АСР
а - общего воздуха; б – разрежения; в - давления первичного воздуха; 1- измерительное устройство расхода общего воздуха; 2 - измерительное устройство температуры сетевой воды; 3 – газоанализатор кислорода; 4 – корректирующий регулятор; 5 – регулятор общего воздуха; 6 – исполнительный механизм; 7 - измерительное устройство разрежения в топке котла; 8 – регулятор разрежения; 9 - измерительное устройство давления первичного воздуха; 10 – регулятор давления первичного воздуха; НА – направляющий аппарат; ДВ – дутьевой вентилятор; ДС – дымосос; РО – регулирующий орган.
Для проведения исследований АСР и расчёта положений органов настройки регулирующих приборов необходимо иметь передаточные функции участков. Передаточные функции участков получим аналитическим методом расчёта.
Для расчета АСР общего воздуха с трехимпульсными регулятором структурная схема представлена на рисунке 7.

Wp1

 U Xp2 у1 хр1 у
U Xp2 у1 хр1 у










 -y -y
-y -y


Рисунок 7 - Структурная схема двухконтурной АСР
Двухконтурная схема автоматического регулирования (рисунок 9) с одним корректирующим и одним или несколькими стабилизирующими ПИ- регуляторами часто применяется на ТЭС.
В приведенной схеме основной сигнал У поступает на вход корректирующего регулятора Wр2, а промежуточный сигнал У1 – на вход стабилизирующего регулятора Wр1. Методика определения оптимальных значений параметров настройки регуляторов двухконтурных систем основана на возможности расчета одного контура (стабилизирующего регулятора или внутреннего) с входным сигналом У1 независимо от другого (корректирующего или внешнего) с выходным сигналом У. Такой подход возможен в тех случаях, когда динамические свойства сигналов У и У1 существенно различны. При этом настройка стабилизирующего регулятора может быть рассчитана независимо, например, по характеристике Wоб1(iw) После определения настроек стабилизирующего регулятора производится расчет оптимальных параметров настройки корректирующего регулятора Wр2.
Динамические свойства участка воздушного тракта от направляющего аппарата дутьевого вентилятора до места измерения расхода воздуха могут быть представлены передаточной функцией последовательного соединения апериодического звена первого порядка с запаздывающим звеном:
 (2)
(2)
Произведем идентификацию объекта с передаточной функцией (2) по S – обазной кривой разгона полученной при пуске объекта (рисунок 8) по методу Круг - Мининой. По разработанной программе для метода Круг – Мининой в среде Basic проведем аппроксимацию исходной кривой. Листинг программы предоставлен в приложении 1.
По временной характеристике (рисунок 8) определяются значения Y1 и Y2, при которых значения t1 и t2 будут равны:
Y1 = 0,33 * Y = 0,33 * 132 = 43,56 0С t1 = 768 с;
Y( 2) = 0,7 * Y = 0,7 * 132= 92,4 0C t2 = 1668 c
По выше указанной программе находим следующие значения:
t = y =
768 43.5435
1217,94 72.5725
2567,94 114.1367
y( 318 )= 0
y( 720 )= 39.6457
y( 1440 )= 83.2786
y( 2160 )= 106.2859
y( 2880 )= 118.4175
y( 3600 )= 124.8144
Аппроксимирующая кривая представлена на рисунке 8.
Тогда передаточная функция примет вид:
 (3)
(3)
Рисунок 8 - Кривая изменения нагрузки объекта регулирования
Динамические свойства участка котла по каналу О2 – расход воздуха также могут быть представлены передаточной функцией последовательного соединения апериодического звена первого порядка с запаздывающим звеном:
 (4)
(4)
Произведем идентификацию объекта с передаточной функцией (4) по S – обазной кривой разгона полученной при пуске объекта (рисунок 9) по методу Круг - Мининой. По разработанной программе для метода Круг – Мининой в среде Basic проведем аппроксимацию исходной кривой. Листинг программы предоставлен в приложении 1.
По временной характеристике (рисунок 9) определяются значения Y1 и Y2, при которых значения t1 и t2 будут равны:
Y1 = 0,33 * Y = 0,33 * 0,03*10
На единицу расхода различного по составу топлива необходимо различное количество воздуха, но его потребность на единицу тепла, выделяющегося при сгорании, не изменяется. Поэтому если оценивать тепловыделение в топке по расходу пара и изменять расход воздуха в соответствии с изменениями расхода пара, то тем самым можно поддерживать оптимальный избыток воздуха. Этот принцип регулирования подачи воздуха используется в схемах пар— воздух (рисунок 4, б) [1, стр.181].
Поддержание избытка воздуха по соотношению тепло — воздух и в особенности пар — воздух отличается простотой и надежностью, но не является точным. Этот недостаток устраняется в системе регулирования экономичности, действующей, например, по схеме задание— воздух с дополнительной коррекцией по О2 (рисунок 4, г) [1, стр.183], в которой регулятор подачи воздуха изменяет его расход по сигналу от главного или корректирующего регулятора давления 5. Сигнал, пропорциональный расходу воздуха рв.п, как и в других схемах, во-первых, устраняет возмущения по расходу воздуха, не связанные с регулированием экономичности (включение или отключение систем пылеприготовления), во-вторых, способствует стабилизации самого процесса регулирования подачи воздуха, так как служит одновременно сигналом жесткой отрицательной обратной связи. Введение дополнительного корректирующего сигнала по содержанию О2 повышает точность поддержания оптимального избытка воздуха в любой системе регулирования экономичности. Добавочный корректирующий регулятор 4 по О2 в схеме регулирования задание—воздух непосредственно управляет подачей воздуха при топочных возмущениях и обеспечивает поддержание заданного избытка воздуха в зависимости от нагрузки агрегата.
Регулирование разрежения обычно осуществляется посредством изменения количества уходящих газов, отсасываемых дымососами. При этом их производительность можно регулировать:
-
поворотными многоосными дроссельными заслонками; -
направляющими аппаратами; -
изменением числа оборотов рабочего колеса дымососа с помощью гидромуфт или с помощью изменения скорости вращения первичного двигателя.
Как объект регулирования разрежения топка обладает благоприятными динамическими свойствами — значительным самовыравниванием и практически отсутствием запаздывания.
Вследствие благоприятных динамических свойств топки в схеме ACP разрежения используются как ПИ-регуляторы, так и И-регуляторы. Наибольшее распространение получила схема регулирования разрежения с одноимпульсным ПИ-регулятором (рисунок 5) [2, стр.275].
Рисунок 5 - Структурная схема регулирования разрежения
Требуемое значение регулируемой величины устанавливается с помощью ручного задатчика ЗРУ регулятора разрежения 1.
Включения регулятора воздуха 3 приводит к временному нарушению материального баланса между поступающим воздухом и уходящими газами. При работе парогенератора в регулирующем режиме могут происходить частые изменения тепловой нагрузки и, следовательно, изменения расхода воздуха. Для предупреждения частого возникновения такого небаланса и увеличения быстродействия регулятора разрежения рекомендуется ввести в ПИ-регулятор разрежения дополнительное исчезающее воздействие от регулятора воздуха через устройство динамической связи 2.
В качестве устройства динамической связи, в частности, может быть использована RС-цепочка, входной сигнал которой поступает на вход регулятора разрежения лишь в момент включения регулятора воздуха. Устройство динамической связи обладает направленностью действия, т. е. ведомым регулятором может быть только регулятор разрежения. Динамическая связь позволяет компенсировать все возмущения в топке, которые возникают при работе регулятора воздуха.
По рассмотренным выше аналогиям структурных схем разработаем структурные схемы АСР общего воздуха, АСР разрежения в топке котла и АСР давления первичного воздуха.
Так как главной задачей АСР водогрейного котла является поддержание температуры сетевой воды на выходе из котла, то нагрузкой для котла является температура сетевой воды. Структурная схема АСР общего воздуха будет выглядить по аналогичной схеме по принципу «нагрузка-воздух» с коррекцией по О2 (рисунок 4, г). Структурная схема АСР общего воздуха для нашего варианта представлена на рисунке 6, а.
Структурная схема АСР разрежения для нашего варианта представлена на рисунке 6, б. Схема выполнена без динамической связи от регулятора воздуха к регулятору разрежения, так как динамическую связь используют в системах регулирования разрежения котельных агрегатов большой производительности .
Структурная схема АСР давления первичного воздуха для нашего варианта представлена на рисунке 6, в.
а) б) в)
Рисунок 6 - Структурные схемы АСР
а - общего воздуха; б – разрежения; в - давления первичного воздуха; 1- измерительное устройство расхода общего воздуха; 2 - измерительное устройство температуры сетевой воды; 3 – газоанализатор кислорода; 4 – корректирующий регулятор; 5 – регулятор общего воздуха; 6 – исполнительный механизм; 7 - измерительное устройство разрежения в топке котла; 8 – регулятор разрежения; 9 - измерительное устройство давления первичного воздуха; 10 – регулятор давления первичного воздуха; НА – направляющий аппарат; ДВ – дутьевой вентилятор; ДС – дымосос; РО – регулирующий орган.
4 РАСЧЕТ АСР ОБЩЕГО ВОЗДУХА КОТЕЛЬНОЙ
УСТАНОВКИ КВТК-100-150
Для проведения исследований АСР и расчёта положений органов настройки регулирующих приборов необходимо иметь передаточные функции участков. Передаточные функции участков получим аналитическим методом расчёта.
Для расчета АСР общего воздуха с трехимпульсными регулятором структурная схема представлена на рисунке 7.
Wp2
Wоб2
Wp1
U Xp2 у1 хр1 у -y -y Рисунок 7 - Структурная схема двухконтурной АСР
Двухконтурная схема автоматического регулирования (рисунок 9) с одним корректирующим и одним или несколькими стабилизирующими ПИ- регуляторами часто применяется на ТЭС.
В приведенной схеме основной сигнал У поступает на вход корректирующего регулятора Wр2, а промежуточный сигнал У1 – на вход стабилизирующего регулятора Wр1. Методика определения оптимальных значений параметров настройки регуляторов двухконтурных систем основана на возможности расчета одного контура (стабилизирующего регулятора или внутреннего) с входным сигналом У1 независимо от другого (корректирующего или внешнего) с выходным сигналом У. Такой подход возможен в тех случаях, когда динамические свойства сигналов У и У1 существенно различны. При этом настройка стабилизирующего регулятора может быть рассчитана независимо, например, по характеристике Wоб1(iw) После определения настроек стабилизирующего регулятора производится расчет оптимальных параметров настройки корректирующего регулятора Wр2.
Динамические свойства участка воздушного тракта от направляющего аппарата дутьевого вентилятора до места измерения расхода воздуха могут быть представлены передаточной функцией последовательного соединения апериодического звена первого порядка с запаздывающим звеном:
Произведем идентификацию объекта с передаточной функцией (2) по S – обазной кривой разгона полученной при пуске объекта (рисунок 8) по методу Круг - Мининой. По разработанной программе для метода Круг – Мининой в среде Basic проведем аппроксимацию исходной кривой. Листинг программы предоставлен в приложении 1.
По временной характеристике (рисунок 8) определяются значения Y1 и Y2, при которых значения t1 и t2 будут равны:
Y1 = 0,33 * Y = 0,33 * 132 = 43,56 0С t1 = 768 с;
Y( 2) = 0,7 * Y = 0,7 * 132= 92,4 0C t2 = 1668 c
По выше указанной программе находим следующие значения:
-
Коб1=132, Тоб1=1125 с, об1=318 с -
контрольные точки:
t = y =
768 43.5435
1217,94 72.5725
2567,94 114.1367
-
дополнительные точки аппроксимирующей прямой:
y( 318 )= 0
y( 720 )= 39.6457
y( 1440 )= 83.2786
y( 2160 )= 106.2859
y( 2880 )= 118.4175
y( 3600 )= 124.8144
Аппроксимирующая кривая представлена на рисунке 8.
Тогда передаточная функция примет вид:
Рисунок 8 - Кривая изменения нагрузки объекта регулирования
Динамические свойства участка котла по каналу О2 – расход воздуха также могут быть представлены передаточной функцией последовательного соединения апериодического звена первого порядка с запаздывающим звеном:
Произведем идентификацию объекта с передаточной функцией (4) по S – обазной кривой разгона полученной при пуске объекта (рисунок 9) по методу Круг - Мининой. По разработанной программе для метода Круг – Мининой в среде Basic проведем аппроксимацию исходной кривой. Листинг программы предоставлен в приложении 1.
По временной характеристике (рисунок 9) определяются значения Y1 и Y2, при которых значения t1 и t2 будут равны:
Y1 = 0,33 * Y = 0,33 * 0,03*10