ВУЗ: Казахская Национальная Академия Искусств им. Т. Жургенова
Категория: Книга
Дисциплина: Не указана
Добавлен: 03.02.2019
Просмотров: 21597
Скачиваний: 19
Spectral Changes and Linear Distortion 2-27
nal's spectrum not linearly related to the input signal depends, in detail, on each specific input
signal and how it is nonlinearly processed by the system.
2.2.3
Sinusoidal Steady-State Measurements
The complex frequency response or system function
(2.2.1)
of a linear system predicts the magnitude (or amplitude)
and phase
of an output
sinusoid relative to an input sinusoid for steady-state operation at the frequency . These two
frequency-domain quantities are fundamental and form the basis for the discussion of linear dis-
tortion of signals by a linear system.
The meaning of the magnitude response of a system is well understood and often displayed
alone as the frequency response even though it is only the magnitude of
. The phase-shift-
-versus-frequency characteristic is not commonly shown but is equally important. Some
conventions, definitions, and properties of phase shift and the phase-shift characteristic merit
discussion.
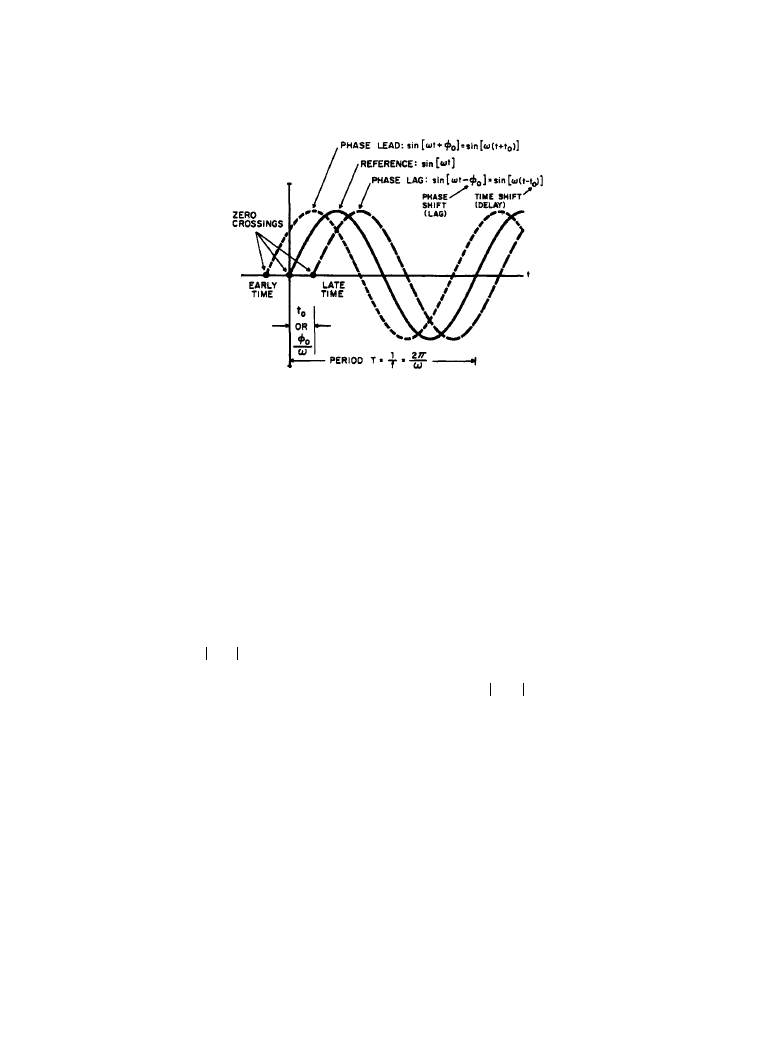
Figure 2.2.1 illustrates the convention for phase lead or lag between sinusoids of the same fre-
quency relative to a reference. The reference sinusoid (solid line) has an upward-sloping zero
crossing at zero time, and that leading (short dashes) has its corresponding zero crossing at an
earlier time or is advanced in time, whereas that lagging (long dashes) has its corresponding zero
crossing at a later time or is delayed in time.
H
ω
( )
H
ω
( ) e
j
φ ω
( )
=
H
ω
( )
φ ω
( )
ω
H
ω
( )
φ ω
( )
Figure 2.2.1
Standard conventions for sinusoids having steady-state phase shifts relative to a ref-
erence sinusoid (solid curve). The leading sinusoid (short dashes) has its first zero crossing at an
earlier time than the reference, whereas the lagging sinusoid (long dashes) has its first zero cross-
ing at a later time.
Downloaded from Digital Engineering Library @ McGraw-Hill (www.digitalengineeringlibrary.com)
Copyright © 2004 The McGraw-Hill Companies. All rights reserved.
Any use is subject to the Terms of Use as given at the website.
Spectral Changes and Linear Distortion

2-28 The Audio Spectrum
Aside from this convention, Figure 2.2.1 has two ambiguities and raises a fundamental ques-
tion about the nature of phase shift itself. First, a phase lead of
π is indistinguishable from a
phase lag of
π; also shifling any of these sinusoids by a multiple of
would not change the
relative phase shifts, and consequently Figure 2.2.1 would not change. Thus, more information
than Figure 2.2.1 shows is required to avoid ambiguity. Second, it appears that a phase shift and a
time shift are equivalent, but they are not. This is so because
and for a specific phase
shift
the corresponding amount of time shift depends upon the sinusoid's frequency . To
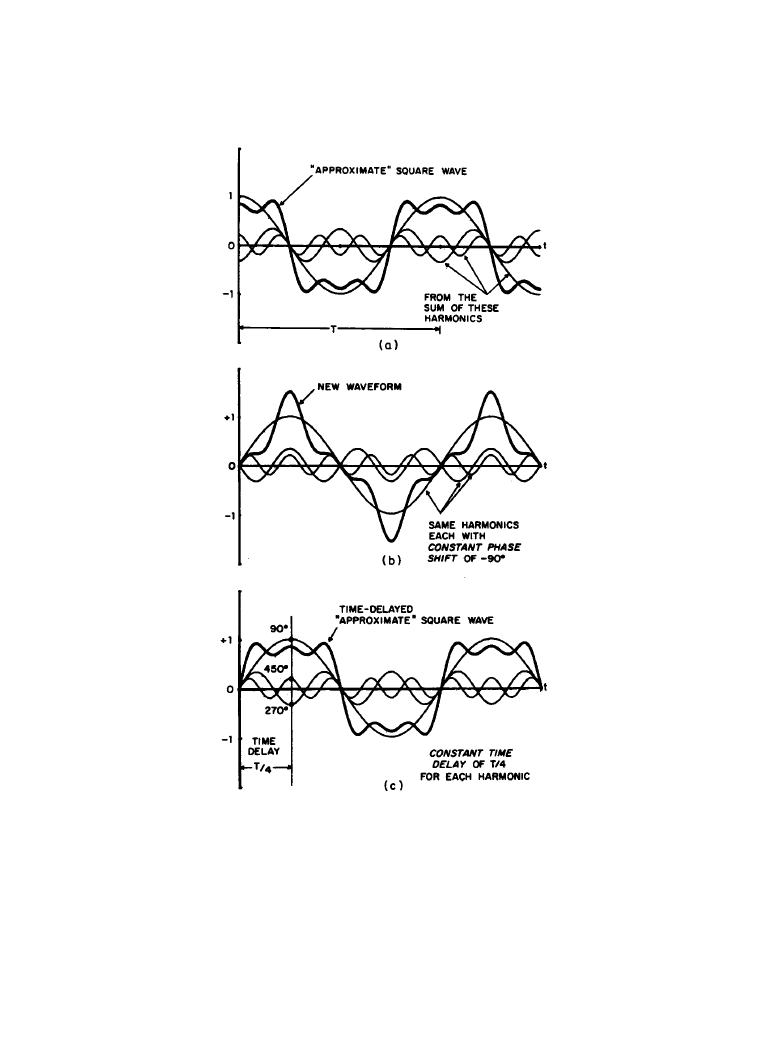
illustrate this point consider Figure 2.2.2a, wherein an approximate square wave is constructed
from the first three nonzero harmonics of its Fourier series. Figures 2.2.2b and c show the differ-
ence between a constant phase shift for each harmonic and a constant time delay for each har-
monic, respectively. The waveform of Figure 2.2.2b is severely linearly distorted, whereas that in
Figure 2.2.2c is not. It is interesting to note that the amount of phase lag necessary to keep the
waveform “together” is directly proportional to frequency (that is; the first, third, and fifth har-
monics were lagged by
π/2, 3π/2, and 5π/2, respectively). Therefore, in Figure 2.2.2c the amount
of phase lag varies linearly with frequency, and this corresponds to a uniform time delay.
The fundamental question raised by Figure 2.2.1 is related to causality (i.e., cause and effect).
How is it possible for a signal to be “ahead” of the reference signal in time, especially if the ref-
erence signal is the input or stimulus to a system and the phase shift of the output signal relative
to the input is measured? Equivalently stated, how can the output-signal phase lead or be ahead
of the input signal in time? Does this suggest that causality would permit only phase lags to
occur in such a situation? It is indeed an interesting question in view of the fact that phase-shift
measurements themselves can be somewhat ambiguous. The answer has to do with the fact that
these are steady-state measurements, or more precisely, with how the steady state itself is
achieved. Both phase lead or phase lag of a system output relative to its input are physically real-
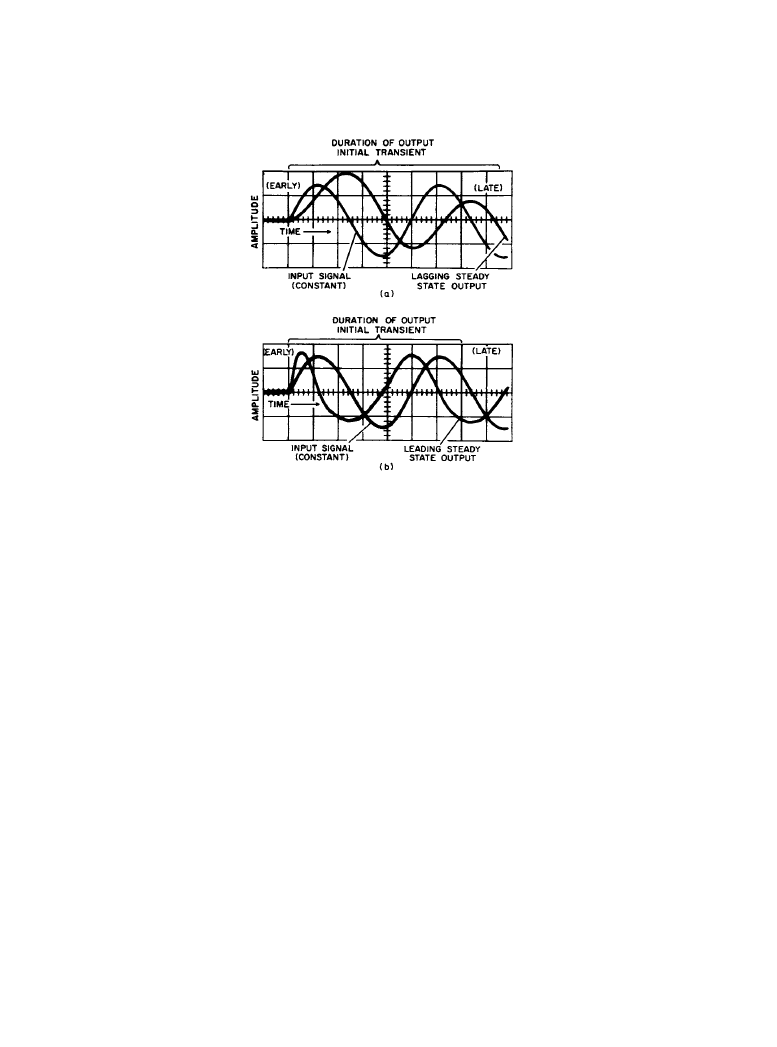
izable without ambiguity or violation of causality. An example of each case is shown in Figure
2.2.3. Here the actual response of two different circuits to a tone-burst input was captured. In
each case the input signal is also shown in time synchronization for reference purposes. It is dur-
ing the initial transient state that either a phase lag or a phase lead is established. Note that in
each case the output zero crossings are initially unequally spaced and that net phase lag or lead is
gradually accumulated. Closer inspection of Figure 2.2.3 reveals that, from a mathematical view-
point, the output in Figure 2.2.3a is approximately the integral with respect to time of the input,
whereas in Figure 2.2.3b the output is nearly the derivative with respect to time of the input. In
the steady state, the corresponding phase shifts are seen to be about
and +
, respec-
tively. Circuits that have these properties are referred to as phase lag (integrators) or phase lead
(differentiators). Another way of interpreting the results of Figure 2.2.3 then (referring also to
Figure 2.2.1) is to note that the integral with respect to time of
is
or
whereas the time derivative of
is
or
2
π
±
φ
0
ωt
0
=
φ
0
ω
π 2
⁄
–
π 2
⁄
ωt
( )
sin
1
–
ω
------
ωt
( )
cos
1
ω
---
ωt π
2
---
–
sin
ωt
( )
sin
ω
ωt
( )
cos
Downloaded from Digital Engineering Library @ McGraw-Hill (www.digitalengineeringlibrary.com)
Copyright © 2004 The McGraw-Hill Companies. All rights reserved.
Any use is subject to the Terms of Use as given at the website.
Spectral Changes and Linear Distortion
Spectral Changes and Linear Distortion 2-29
ω
ωt π
2
---
+
sin
Figure 2.2.2
Characteristics of various waveforms: (
a) an approximate square wave constructed
from the first three (nonzero) Fourier harmonics, (
b) constant phase shift for each harmonic yields
a new waveform that is linearly distorted, (
c) constant time delay for each harmonic uniformly
delays the square wave while preserving its shape.
Downloaded from Digital Engineering Library @ McGraw-Hill (www.digitalengineeringlibrary.com)
Copyright © 2004 The McGraw-Hill Companies. All rights reserved.
Any use is subject to the Terms of Use as given at the website.
Spectral Changes and Linear Distortion
2-30 The Audio Spectrum
so that here the steady-state phase lag or lead of
π/2 in the frequency domain corresponds to inte-
gration or differentiation, respectively, in the time domain.
An important conclusion to be drawn from Figure 2.2.3 is that the phase shift of a system is
remarkably a property of the steady state.
Two significant aspects of a general phase-shift-versus-frequency characteristic
at a
specific frequency
are its actual numerical value
(positive, zero, or negative) and its
behavior in the vicinity of
(increasing, constant, or decreasing). The reason for this is that
most useful signals passed through a system have finite spectral widths which are broad com-
pared with that of any single frequency used to measure the phase characteristic itself.
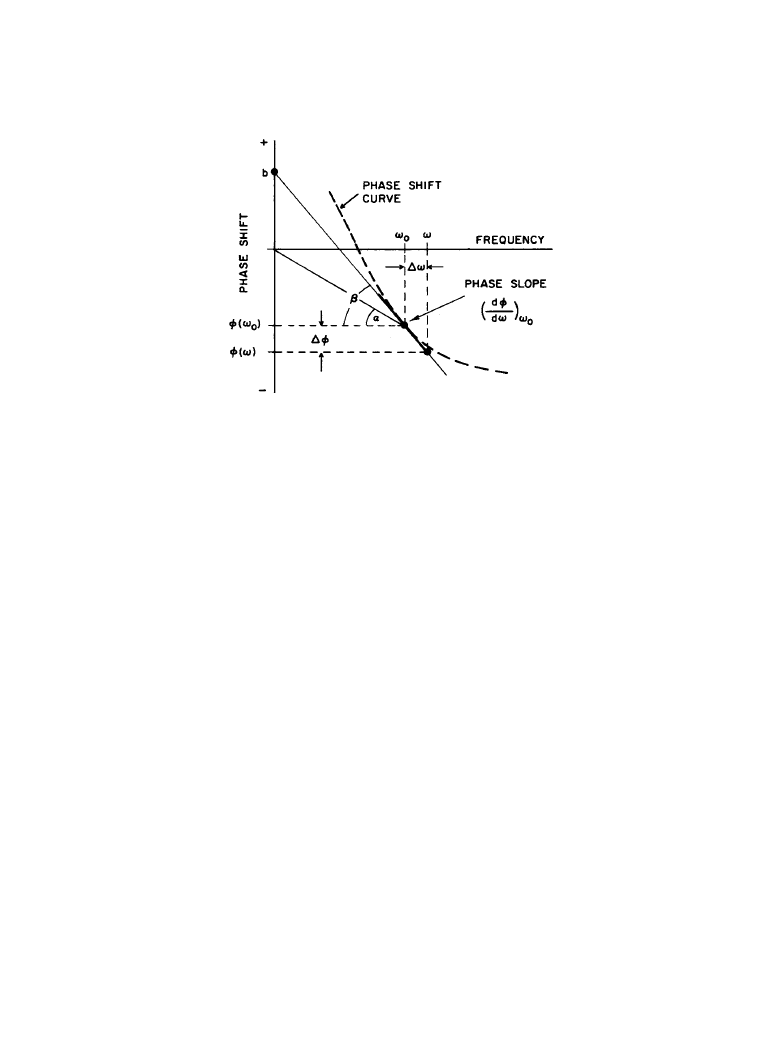
The value of the phase shift at an arbitrary frequency that is close to a specific frequency
can be represented by
(2.2.2)
and in Equation (2.2.2) the correction terms depend upon the difference
. To a first
approximation and with reference to Figure 2.2.4
(2.2.3a)
φ ω
( )
ω
0
φ ω
0
( )
ω
0
ω
0
φ ω
( ) φ ω
0
( )
≅
correction terms
+
∆ω
ω ω
0
–
=
φ ω
( ) φ ω
0
( )
≅
∆φ
+
Figure 2.2.3
Steady-state phase lag or lead is established only after an initial transient period: (
a)
a phase lag of about 90
º
occurs, and the output signal is approximately the
integral with respect to
time of the input; (
b) a phase lead of 90
º
occurs, and the output is nearly the time
derivative of the
input. The input sinusoid is the same in each case. The transient buildup of phase lag or lead illus-
trates that the phase shift of a system is remarkably a property of the steady state.
Downloaded from Digital Engineering Library @ McGraw-Hill (www.digitalengineeringlibrary.com)
Copyright © 2004 The McGraw-Hill Companies. All rights reserved.
Any use is subject to the Terms of Use as given at the website.
Spectral Changes and Linear Distortion
Spectral Changes and Linear Distortion 2-31
(2.2.3b)
(2.2.3c)
where
is the derivative of the phase shift at
or, equivalently, its slope there. If
, Equation
(2.2.3) is exact, and when is near
, it is, in general, approximate. In this approximation it is
the slope or first derivative of the phase characteristic at
that describes the behavior of
near
. Thus, for signals whose spectra lie in the neighborhood of
both
and
are important because
gives the steady-state absolute phase shift of the output relative to
the input at
, whereas
φ ω
( )
φ ω
0
( )
≅
∆φ
∆ω
------
∆ω
+
φ ω
( )
φ ω
0
( )
≅
d
φ
d
ω
------
ω
0
ω ω
0
–
[
]
+
d
φ
d
ω
------
ω
0
ω
0
ω
ω
0
=
ω
ω
0
ω
0
φ ω
( )
ω
0
ω
0
φ ω
0
( )
d
φ
d
ω
------
ω
0
φ ω
0
( )
ω
0
Figure 2.2.4
Arbitrary phase-shift-versus-frequency characteristic (long dashes). For frequencies
ω
near
ω
0
the slope of the phase shift curve is nearly constant and can be approximated by the
derivative
/
evaluated at
ω
0
. The numerical value of the phase slope (or derivative) indicates
how the phase shift varies near
ω
0
.
d
φ dω
Downloaded from Digital Engineering Library @ McGraw-Hill (www.digitalengineeringlibrary.com)
Copyright © 2004 The McGraw-Hill Companies. All rights reserved.
Any use is subject to the Terms of Use as given at the website.
Spectral Changes and Linear Distortion