ВУЗ: Казахская Национальная Академия Искусств им. Т. Жургенова
Категория: Книга
Дисциплина: Не указана
Добавлен: 03.02.2019
Просмотров: 21601
Скачиваний: 19

Spectral Changes and Linear Distortion 2-37
has a considerably wider spectrum than the tone burst, it has many spectral components both
above and below
. In case 8
and from the approximation (2.2.3c)
so that for
,
is positive, whereas for
,
is negative. Therefore, and in sim-
ple terms, higher frequencies tend to be differentiated in time, whereas lower ones are integrated.
This is seen to occur. Just the opposite occurs in case 4 because
.
From the foregoing examples it is clear that the response of a system to transient signals
depends on its frequency response. For minimum-phase systems, the phase and derivative of
phase with respect to frequency can be used to interpret, qualitatively, important aspects of linear
distortion of signals in the time domain.
2.2.4
Phase Delay and Group Delay
Phase delay and group delay are useful quantities related to the phase shift
and defined as
(2.2.4)
and
(2.2.5)
respectively. The negative signs are required because, according to the conventions for sinusoids
in Figure 2.2.1, negative values of phase shift correspond to positive time delays. At a specific
frequency
, these two quantities are constants in the two-term Taylor-series expansion of
Equation (2.2.3c), valid near and at
, which can be rewritten as
(2.2.6)
Equation (2.2.6) restates the fact that the phase shift at
ω
is equal to the phase shift at
plus the
phase shift at
ω
relative to
. The steady-state phase shift for the components of a narrowband
signal near
is given by Equation (2.2.6), and the effect of the two terms in this equation can
be interpreted in the following way. First, each component in the band undergoes a fixed phase
shift
then those components at frequencies different from
are subjected to additional phase shift
. This additional phase shift is one which varies linearly with frequency, so it
does not alter the waveshape (see Figure 2.2.2).
ω
0
/2
π
1kHz
=
d
φ/dω
[
]
ω
0
0
>
φ ω
( )
d
φ/dω
[
]
ω
0
ω ω
0
–
(
)
=
ω ω
0
>
φ ω
( )
ω ω
0
<
φ ω
( )
d
φ/dω
[
]
ω
0
0
<
φ ω
( )
τ
p
ω
( )
φ ω
( )/ω,
–
=
τ
g
ω
( )
d
φ ω
( )
d
ω
-------------
–
=
ω
0
φ ω
( )
ω
0
φ ω
( )
ω
0
τ
p
ω
0
( ) τ
g
ω
0
( ) ω ω
0
–
[
]
–
–
≅
ω
0
ω
0
ω
0
ω
0
–
τ
p
ω
0
( )
φ ω
0
( )
=
ω
0
τ
g
–
ω
0
( ) ω ω
0
–
[
]
Downloaded from Digital Engineering Library @ McGraw-Hill (www.digitalengineeringlibrary.com)
Copyright © 2004 The McGraw-Hill Companies. All rights reserved.
Any use is subject to the Terms of Use as given at the website.
Spectral Changes and Linear Distortion
2-38 The Audio Spectrum
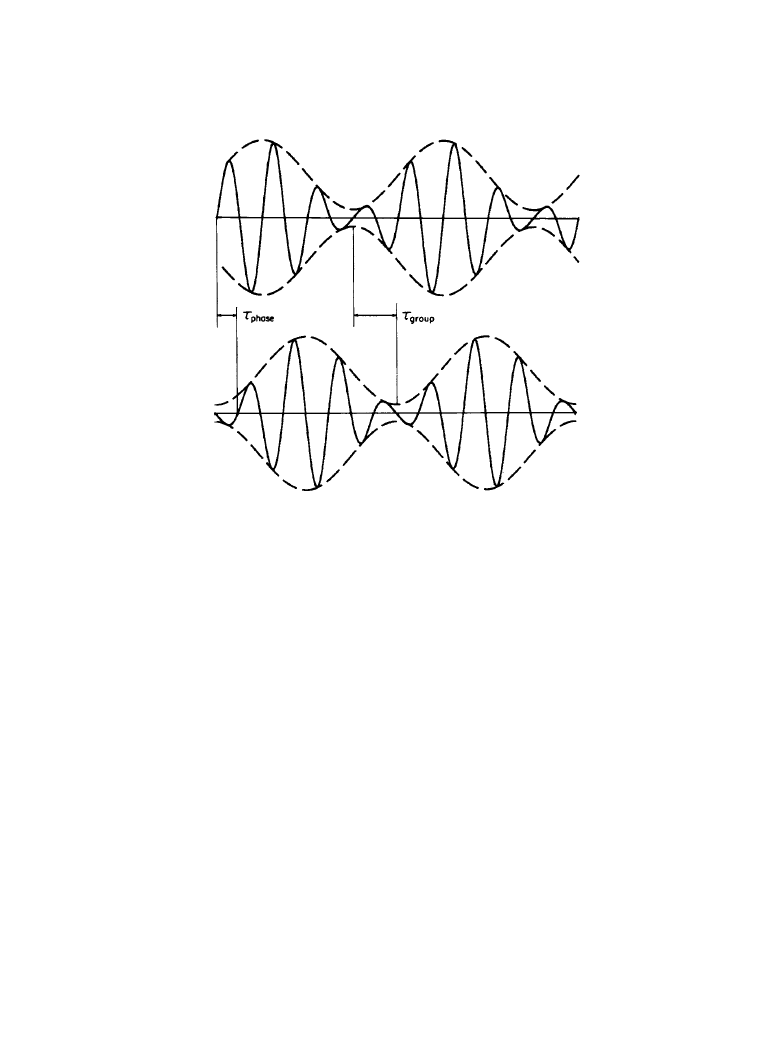
An amplitude-modulated (AM) sinusoid is a narrowband signal, and the effects of phase
delay and group delay on such a signal are illustrated in Figure 2.2.8. Phase delay phase-lags
(delays) the high-frequency carrier (inner structure), while the envelope (outer structure) is
delayed by an amount equal to the group delay.
Geometrically, Figure 2.2.4 shows that
Note that
only when
and the intercept
. In this special case
and
varies linearly as a function of
ω (that is, the entire phase-shift characteristic is a
straight line which passes through the origin having slope
).
Generally both
and
can assume positive, zero, or negative values depending upon the
detailed behavior of the phase-shift characteristic. Referring to the special minimum-phase sys-
tem in Figure 2.2.5 and in view of definition (2.2.5), the group-delay characteristic is the nega-
tive of the phase slope, and therefore its shape is the same as the magnitude characteristic for this
special case. It is also interesting to note from the same figure that for the bandpass system 5-6-
4-3-1
τ
g
ω
0
( )
tan
β and τ
p
ω
0
( )
tan
α
=
=
τ
g
τ
p
=
α
β
=
b
0
=
φ 0
( )
0
=
φ ω
( )
τ
g
–
τ
p
τ
g
Figure 2.2.8
The difference between phase delay
τ
phase
and group delay
τ
group
is illustrated by
comparing these two amplitude-modulated waveforms. The lower waveform has positive phase
delay and positive group delay relative to the upper waveform. Because the envelope of the high-
frequency oscillation is delayed by an amount of time
τ
group
group delay is sometimes referred to
as
envelope delay.
Downloaded from Digital Engineering Library @ McGraw-Hill (www.digitalengineeringlibrary.com)
Copyright © 2004 The McGraw-Hill Companies. All rights reserved.
Any use is subject to the Terms of Use as given at the website.
Spectral Changes and Linear Distortion

Spectral Changes and Linear Distortion 2-39
can be positive, negative, or zero, but
For the system 1-2-8-7,
.
The approximate nature of Equation (2.2.6) deserves particular emphasis because either is
valid only over a narrow range of frequencies
∆ω, and outside this range the correction terms
mentioned in Equation (2.2.2) contain higher-order derivatives in the Taylor series that generally
cannot be neglected.
2.2.4a
Distortionless Processing of Signals
In the time domain, the requirement for distortionless linear signal processing (i.e., no wave-
shape change) is that the system impulse response h(t) have the form
(2.2.7a)
where
δ(t) is the unit impulse, and the constants
and
. Equation (2.2.7a) and the con-
volution theorem together imply that the output signal g(t) is related to the input f(t) by
(2.2.7b)
The distortionless system scales any input signal by a constant factor K and delays the signal as a
whole by T seconds. The output is a delayed replica of the input. Through substitution, Equation
(2.2.7b) gives the corresponding restrictions on the frequency response, namely
(2.2.8)
Comparison of Equation (2.2.8) with Equation (2.2.1) indicates that the frequency-domain
requirements are twofold: constant magnitude response |H(
ω)| = K and phase response propor-
tional to frequency
. Waveform distortion or linear distortion is caused by deviations
of
H(ω) from a constant value K as well as departures of
from the linearly decreasing
characteristic
. The former is called amplitude distortion and the latter phase distortion.
From Equation (2.2.8) absence of phase distortion requires that the phase and group delays in
Equations (2.2.4) and (2.2.5) each equal the overall time delay
(2.2.9)
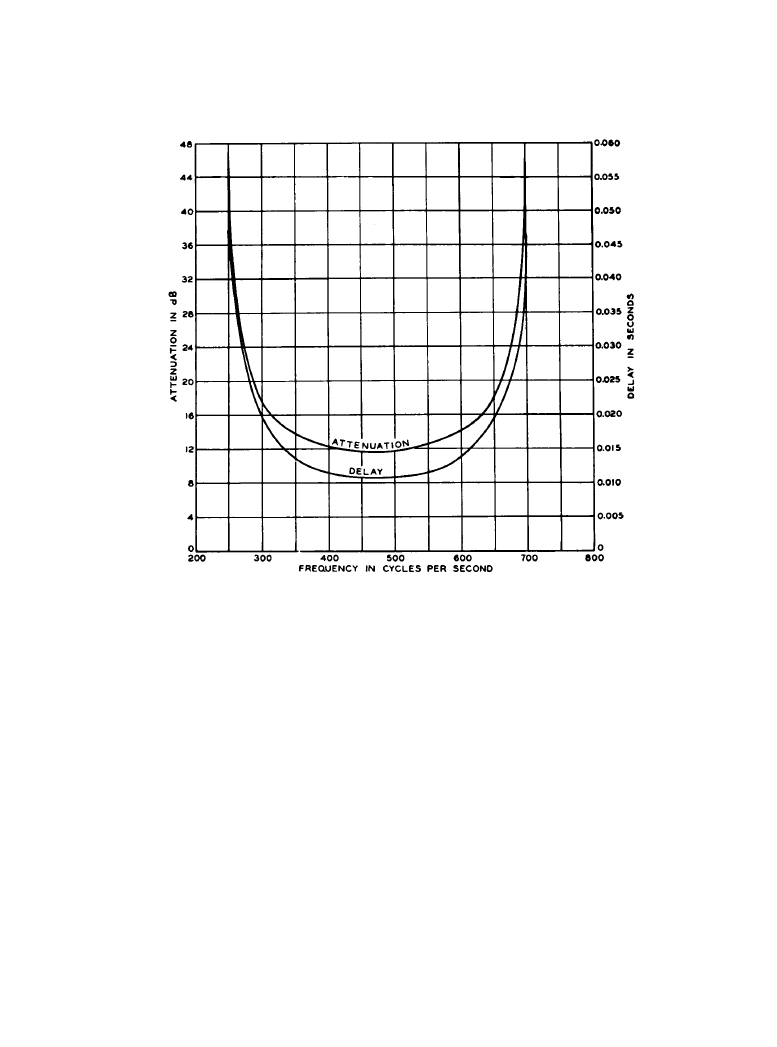
Some experimentally measured effects of the deviations of
H(ω) and
from a con-
stant value are illustrated in Figure 2.15. In the experiment, four bandpass filters were connected
in cascade to give the attenuation magnitude (reciprocal of gain magnitude) and group-delay
characteristics shown in Figure 2.2.9a. The group delay is reasonably flat at midband, having a
τ
p
ω
( )
φ ω
( )
–
/
ω
=
τ
g
ω
( )
d
φ
–
/d
ω 0
≥
=
τ
g
ω
( ) 0
≤
h t
( )
Koˆ t
T
–
(
)
=
K
0
>
T
0
≥
g t
( )
Kf t
T
–
(
)
=
H
ω
( )
Ke
jwT
–
=
φ ω
( )
ωT
=
φ ω
( )
ωT
–
T
0
≥
τ
p
ω
( )
τ
g
ω
( )
T
=
=
τ
g
ω
( )
Downloaded from Digital Engineering Library @ McGraw-Hill (www.digitalengineeringlibrary.com)
Copyright © 2004 The McGraw-Hill Companies. All rights reserved.
Any use is subject to the Terms of Use as given at the website.
Spectral Changes and Linear Distortion
2-40 The Audio Spectrum
minimum value there of
. Near and at the passband edges
τ
g
deviates considerably
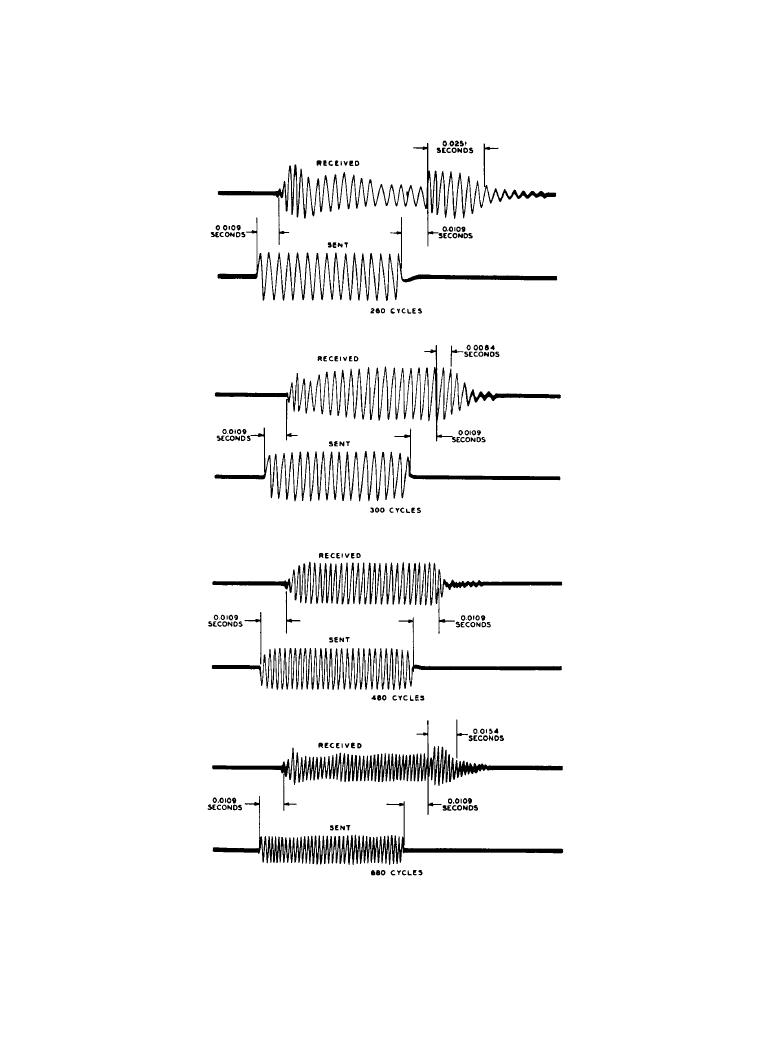
from its minimum value. The effects in the time domain are shown in Figure 2.2.9b. Here, tone
bursts at frequencies of 260, 300, 480, and 680 Hz were applied to the filter, and both input and
output oscillographs were obtained. In each of these cases, the oscillations start to build up after
a time equal to the minimum value of
τ
g
. There is significant linear distortion for the tone bursts
whose spectra lie at the passband edges. Some of this distortion can be ascribed to nonconstant
attenuation, but the waveform elongation is primarily due to the group delay
τ
g
(
ω
) deviating
from its minimum value.
These experimental results indicate that, for distortionless processing of signals, the band of
frequencies throughout which both magnitude response and group delay of the system are con-
τ
g
10.9 ms
=
(
a)
Figure 2.2.9
Attenuation and group delay characteristics: (
a) attention (reciprocal of gain) magni-
tude in decibels and group delay in seconds versus frequency characteristics of four cascaded
bandpass filters; (
b) experimentally measured responses to transient input signal (tone burst) of
filtering network whose steady-state characteristics are shown in
a. For this bandpass system,
each output signal is delayed by the minimum value of the group delay. When the tone-burst spec-
trum lies near either passband edge, significant amounts of linear distortion occur in the form of
waveform elongation. This is due, for the most part, to the departure of the group-delay character-
istic from its flat value in the midband and is called
group-delay distortion.
Downloaded from Digital Engineering Library @ McGraw-Hill (www.digitalengineeringlibrary.com)
Copyright © 2004 The McGraw-Hill Companies. All rights reserved.
Any use is subject to the Terms of Use as given at the website.
Spectral Changes and Linear Distortion
Spectral Changes and Linear Distortion 2-41
Figure 2.2.9
Continued
(
b)
Downloaded from Digital Engineering Library @ McGraw-Hill (www.digitalengineeringlibrary.com)
Copyright © 2004 The McGraw-Hill Companies. All rights reserved.
Any use is subject to the Terms of Use as given at the website.
Spectral Changes and Linear Distortion