ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 20.12.2021
Просмотров: 1809
Скачиваний: 3
![]()
де k – клас точності приладу в процентах;
xn – максимальне значення вимірюваної величини.
Прилади класів точності 0,02; 0,05; 0,1; 0,2 використовуються, головним чином, для точних лабораторних вимірювань і називаються прецезійними; прилади класів 0,5; 1,0; 1,5; 2,5 мають назву технічних.
Прилади магнетоелектричної системи
Прилади цієї системи складаються з двох основних частин: постійного магнету і котушки, що має вигляд рамки. Принцип дії вимірювального механізму цих приладів заснований на взаємодії сильного магнетного поля постійного магнету з слабким магнетним полем рамки, по якій проходить вимірювальний струм. Схему приладу магнетоелектричної системи наведено на рис. 1.
Магнетна система вимірювального механізму складається з сильного постійного магнету 4, полюсних наконечників 5, нерухомого осердя 2.
Між полюсними наконечниками і осердям розміщується рамка (котушка) 3, що являє собою досить легкий алюмінієвий каркас, на який намотаний тонкий мідний дріт діаметром від 0,03 до 0,2 мм. Така система забезпечує вільне обертання рамки навколо осердя, а отже, і відхилення скріпленої з нею стрілки 1 відносно шкали. При проходженні струму I через рамку на неї діє обертальний момент

Рис. 1
M = n B S I ,
де n – кількість витків рамки;
B – магнетна індукція;
S – площа рамки.
Цей момент зрівноважується протидіючим моментом деформації спіральних пружин, які на рисунку не показані.
Прилади магнетоелектричної системи мають високу чутливість, мале споживання електричної енергії, рівномірну шкалу.
Високоточні прилади класів 0,02; 0,05; 0,1; 0,2 можуть бути лише магнетоелектричної системи.
Прилади магнетоелектричної системи мають ряд недоліків, до яких слід віднести: порівняно складна будова, чутливість до перевантажень, можливість вимірювати лише постійний струм.
Прилади електромагнетної системи
Прилади цієї системи складаються з плоскої або круглої нерухомої котушки, на яку намотаний мідний дріт, і рухомого осердя, виготовленого з м'яких магнетних матеріалів (електротехнічна сталь, пермалой). Принцип дії приладів цієї системи заснований на взаємодії магнетного поля котушки, по якій проходить струм, з рухливим феромагнетним осердям рис. 2.
Вимірюваний струм I, що проходить по котушці 3, створює магнетне поле. В це поле втягується осердя у вигляді стальної пластинки 4, закріпленої на осі 6. Намагнеченість осердя і саме магнетне поле котушки пропорційні струмові, отже, обертальний момент пропорційний квадрату струму:
![]()
де k1 – коефіцієнт пропорційності, який залежить від конструкції приладу.
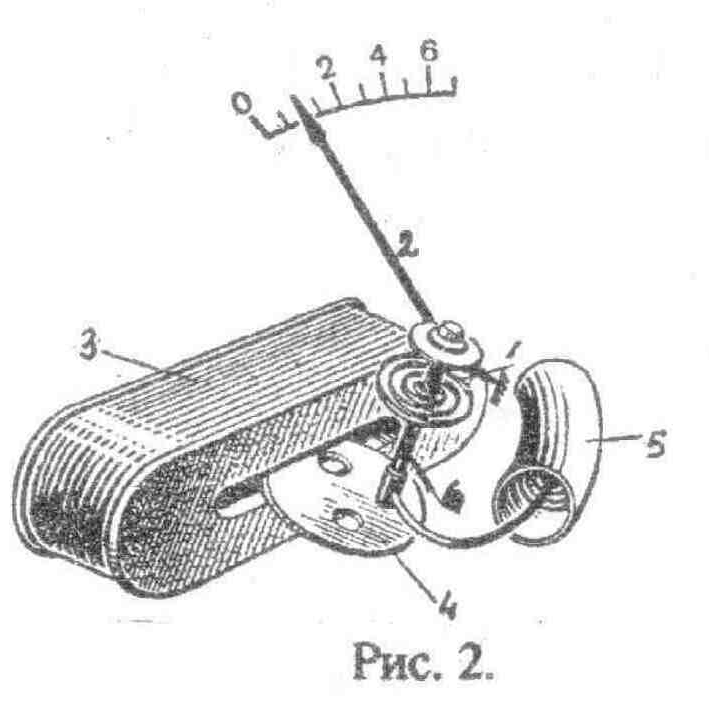
Рис. 2
Протидіючий момент M2 створюється пружинками 1. Він пропорційний кутові повороту рухливої частини приладу:
![]()
де k2 – коефіцієнт пропорційності, який залежить від пружних властивостей пружин.
Для швидкого заспокоєння рухливої частини приладу і стрілки застосовують повітряні демпфери 5. Демпфер - це камера, в якій рухається алюмінієвий поршень. При повороті осердя поршень зазнає опору повітря.
Рівновага рухливої частини приладу визначається рівністю протилежно напрямлених моментів: M1 = M2. Звідки
![]()
де
![]() .
Отже, шкала електромагнетного приладу
нерівномірна, квадратична. Із зміною
напряму струму змінюються як напрям
магнетного поля, так і намагнеченість
осердя. Отже, прилади цієї системи
застосовуються для вимірювань постійного
і змінного струмів. В останньому випадку
вони реагують на діюче значення змінного
струму, їх використовують також для
вимірювання напруги в електричному
колі.
.
Отже, шкала електромагнетного приладу
нерівномірна, квадратична. Із зміною
напряму струму змінюються як напрям
магнетного поля, так і намагнеченість
осердя. Отже, прилади цієї системи
застосовуються для вимірювань постійного
і змінного струмів. В останньому випадку
вони реагують на діюче значення змінного
струму, їх використовують також для
вимірювання напруги в електричному
колі.
Недоліки приладів електромагнетної системи: нерівномірність шкали, менша точність порівняно з магнетоелектричними приладами, залежність показів від зовнішніх магнетних полів. Такого типу прилади покривають металевими кожухами, або виготовляють астатичними, тобто з двома котушками, включеними послідовно.
Прилади електродинамічної системи
Прилади цієї системи відзначаються тим, що їх дія грунтується на взаємодії магнетних полів двох котушок (рухомої і нерухомої) із вимірюваним струмом. Одна із взаємодіючих котушок нерухома і складається з двох послідовно з’єднаних котушок 4, між якими є зазор. В ньому розміщується вісь обертання рухомої безкаркасної котушки 3. З віссю скріплена стрілка 1 - покажчик з алюмінієвою пластинкою повітряного демпфера 2. Рис. 3.
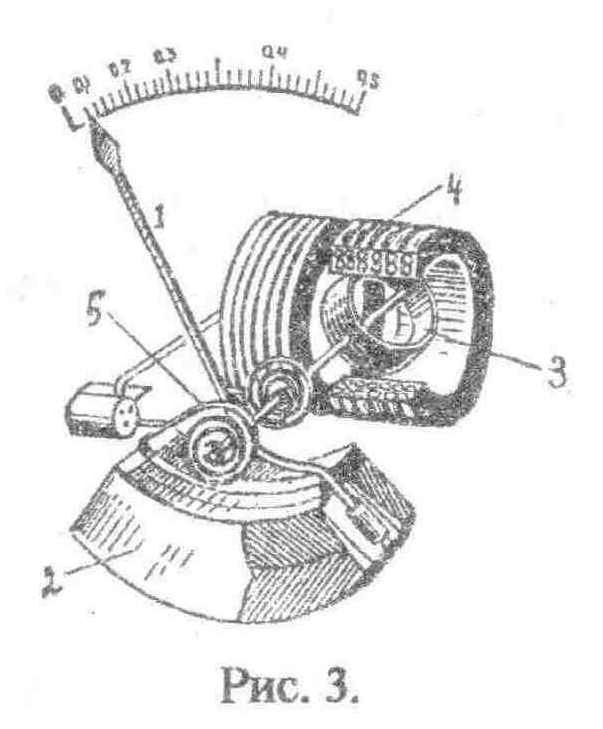
Рис. 3
На вісі також ізольовано закріплені кінці двох спіральних пружин 5, які призначені для підведення вимірювального струму і створення протидіючого моменту. Власне магнітне поле котушок мале, тому для захисту їх від впливу зовнішніх полів застосовують екранування або прилади виготовляють астатичними.
Котушки в приладах електродинамічної системи залежно від призначення їх з’єднуються послідовно або паралельно. Якщо котушки приладу з’єднати паралельно, то його можна використовувати як амперметр. Якщо обидві котушки з’єднати послідовно і приєднати до них додатковий опір, то прилад може використовуватись як вольтметр. У ватметрах нерухома котушка вмикається в коло струму послідовно, а рухома котушка з додатковим опором – паралельно споживачам енергії.
Прилади індукційної системи
Прилади індукційної системи характеризуються тим, що принцип їхньої дії грунтується на взаємодії вихрових індукційних струмів в рухомій частині приладу (алюмінієвий диск, насаджений на вертикальну вісь) із змінними магнетними потоками нерухомих електромагнетів. Один із електромагнітів має обмотку з тонкого ізольованого дроту, яка є обмоткою напруги і включається в коло паралельно навантаженню.
Серед приладів індукційної системи широке застосування мають лічильники електричної енергії змінного струму.
Прилади електронної системи
До приладів електронної системи відносяться електронні вольтметри, які складаються з електронних ламп або напівпровідникових приладів і вимірювального механізму магнетоелектричної або електростатичної системи. Прилади електронної системи використовуються для радіотехнічних вимірювань напруг і частот в значних діапазонах. Такі прилади мають досить великі вхідні опори, тому їх використовують для вимірювання напруги високоомних малопотужних джерел.
Цифрові прилади
Прилади цієї системи визначають невідому величину, що вимірюється в дискретно цифровій формі за допомогою цифрових індикаторів.
Цифрові прилади мають ряд переваг над звичайними, основні з яких: висока точність і швидкість вимірювання, об’єктивність і повна автоматизація процесу вимірювання, можливість передачі результатів на відстані і подальшої їх обробки на ЕОМ.
Поряд з перевагами цифрові прилади мають ряд недоліків; складність схеми, значні габарити, менша надійність.
У мовні
позначення на шкалах електровимірювальних
приладів
мовні
позначення на шкалах електровимірювальних
приладів
-
- магнетоелектрична система з рухомою рамкою;

2. - магнетоелектрична система з рухомим магнітом;
3
 . -
електромагнетна система;
. -
електромагнетна система;
4. - електродинамічна система;

-
- індукційна система;
5 . -
електронна система;
. -
електронна система;
6 . -
для постійного струму чи напруги;
. -
для постійного струму чи напруги;

7
.
- для змінного струму чи напруги;
8 .
- для постійного або змінного
струму чи напруги;
.
- для постійного або змінного
струму чи напруги;

9. - клас точності приладу;
1 0.
- магнетний екран;
0.
- магнетний екран;
1 1.
- горизонтальне розміщення;
1.
- горизонтальне розміщення;

12. - вертикальне розміщення;
I
2
13. - випробувальна напруга ізоляції 2 кВ.
Для правильної і ефективної організації електричних вимірювань слід перед усім докладно ознайомитися з основними характеристиками електровимірювальних приладів на їхніх шкалах.
Довільний електровимірювальний прилад у процесі вимірювань не повинен змінювати своїх параметрів і режиму дій об’єкта вимірювання. Отже, опір амперметра мусить бути по можливості малим, а опір вольтметра - великим. Розширення меж вимірювання амперметрів досягається включенням паралельно амперметру шунта. Розрахунки шунта виконують за формулою:
![]()
де ![]() ,
тобто I – найбільше
значення струму, який повинен вимірювати
амперметр; Ia
– сила струму
повного відхилення стрілки (граничний
струм приладу);
,
тобто I – найбільше
значення струму, який повинен вимірювати
амперметр; Ia
– сила струму
повного відхилення стрілки (граничний
струм приладу);
Ra – внутрішній опір приладу;
Rш– опір шунта;
Розширення меж вимірювання вольтметрів досягається включенням послідовно до вольтметра додаткового резистора Rд. Розрахунок опору додаткового резистора виконують згідно формули:
![]() ,
,
де
![]() тобто U –
найбільше значення напруги, яку
слід вимірювати; Uв
– напруга,
на яку розрахований вольтметр;
тобто U –
найбільше значення напруги, яку
слід вимірювати; Uв
– напруга,
на яку розрахований вольтметр;
Rв – опір вольтметра;
Rд – додатковий опір.
Дослідження електричного поля методом моделювання
л.1. §§ 5, 6, 13.2. §§ 2.1, 2.2, 2.3
Мета роботи: дослідити конфігурацію електростатичного поля; побудувати еквіпотенціальні поверхні і лінії напруженості для заданої форми електродів; набути навики використання теореми Гаусса.
Прилади і обладнання: мікроамперметр; вольтметр; джерело струмів.
Теоретичні відомості
Електричне поле в діелектрику подібне до поля постійного струму в провідному середовищі при однаковій конфігурації електродів. Якщо потенціали електродів в обох випадках одні і ті ж, розподіл потенціалу в діелектрику такий же, як і в провідному середовищі з струмом. Подібність полів видно із слідуючого співставлення їх властивостей.
Електростатичне поле в діелектрику потенціальне, циркуляція вектора напруженості електростатичного поля вздовж замкнутого контуру
![]() .
.
Поле в провідному однорідному середовищі /без джерел сторонніх сил/ також потенціальне. Постійний струм не створює завихрень між електродами. Тому
![]()
оскільки у відповідності з законом Ома
![]() ,
,
де
![]() –
густина струму;
–
густина струму;
– електропровідність середовища.
Існує також подібність і між граничними умовами. На границі поділу діелектриків тангенціальна і нормальна складові вектора напруженості електростатичного поля задовольняють слідуючі умови:
![]()
У провідному середовищі неперервність тангенціальних складових витікає із потенціальності поля струму. Граничні умови для нормальних складових вектора густини струму
![]()
випливають із умови неперервності
![]() .
.
Із подібності граничних умов слідує, що провідне середовище з струмом може служити моделлю для дослідження електростатичного поля, якщо електропровідність середовища замінити діелектричною проник-ністю , яка задається для модельованого діелектрика, а електроди в обох випадках розмістити однаково. Поле в неоднорідному діелектрику, різні області якого мають неоднакову діелектричну проникність , також можна моделювати на провідному середовищі, якщо подібний розподіл і .
Виміряти розподіл потенціалів у провідному середовищі значно простіше, ніж в діелектрику, тому дослідження на моделі має перевагу над електростатичним оригіналом. За допомогою моделювання легко визначити ємність досліджуваної системи. Розрахункова формула для ємності буде одержана, якщо в формулі
![]()
заряд замінити за теоремою Гаусса потоком вектора електростатичного зміщення через замкнуту поверхню
![]()
Тоді ємність
 . (1)
. (1)
Потік розраховується крізь замкнуту еквіпотенціальну поверхню, яка оточує електрод модельованої системи, з використанням знайдених на провідній моделі значень нормальної компоненти вектора напруженості En. Різницю потенціалів U беруть рівною напрузі між електродами моделі, діелектричну проникливість – значенню, яке задається для модельованого діелектрика.
Досліджувальна установка
Як провідне середовище для моделі використовують провідний папір, властивості якого в площині однакові. Можна також використати воду, слабкі кислотні або лужні розчини, які наливають у плоскі ванночки розміром 104040 см із хорошого діелектрика.
Моделюють плоскі поля, тобто такі, потенціал і напруженість яких залежить лише від двох координат. Плоским являється поле в циліндричному конденсаторі далеко від його кінців, в двохпровідній довгій лінії, між окремим провідником і провідною поверхнею і т.д. На провідному папері відтворюється переріз такого поля площиною, перпендикулярною до електродів.
Електрична схема досліджуваної установки подана на рис.1. Потенціал у різних точках аркуша провідного паперу 1 вимірюють з допомогою зонда 2, з’єднаного через мікроамперметр з рухомим контактом потенціометра R.
Чотири ділянки кола — дві, між рухомим контактом потенціометра і його кінцевими контактами і дві між зондом і електродами на аркуші паперу — створюють місток постійного струму. Струм у діагоналі містка дорівнює нулю, коли зонд розміщують у точці, потенціал якої співпадає з потенціалом рухомого контакту потенціометра .

Рис. 1
Різницю потенціалів між нижнім контактом потенціометра і його рухомим контактом вимірюють за допомогою вольтметра V. До-сліджувальна установка комплектується пантографом, з допомогою якого координати зонда переносять на аркуш паперу.
В результаті вимірювань одержують картину проекцій еквіпотенціальних поверхонь на аркуш провідного паперу з заданим кроком . Подібний вигляд має картина поля, яка може бути одержана при моделюванні поля двохпровідної лінії, що показана на рис.1 (штрихові лінії).
Для побудови ліній напруженості (силових ліній) використовують слідуючий спосіб (рис. 2). Проводять лінію, яка сполучує електроди, так, щоб вона співпала з віссю симетрії поля.
Із точки 0 на поверхні електрода вимірюють віддаль 01 до найближчої еквіпотенціальної поверхні. Цю віддаль відкладають вздовж поверхні електрода, одержують таким чином точку 1 на електроді. Через точку 1 проводять відрізок 12 перпендикулярно поверхні електрода. Потім віддаль 12 відкладають вздовж поверхні електрода і одержують таким чином точку 2 і т.д. Аналогічну побудову здійснюють від точки 0 в другу сторону (кожну побудову слід закінчити таким чином, щоб довжина останнього до осі симетрії відрізка на поверхні електрода була більшою довжини передостаннього). Розділивши таким чином найближчу до електрода еквіпотенціальну поверхню, через одержані точки (1; 2; 3; ... i) проводять перпендикулярні їй відрізки до перетину з слідуючою еквіпотенціальною поверхнею. Після того, як всі еквіпотенціальні поверхні будуть поділені, одержані точки слід з’єднати плавними лініями, додержуючись їх ортогональності до еквіпотенціальних ліній у точках перетину. (Якщо поле має дві осі симетрії, наприклад поле двохпровідної лінії, то побудову силових ліній слід проводити зразу від обох електродів).