ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 21.12.2021
Просмотров: 2672
Скачиваний: 10

96
Номинальный
ток
и
мощность
исполнений
электроприводов
приведены
в
табл
.
Г
1
В
приводах
АТО
4
и
АТО
6
в
силовой
цепи
устанавливаются
неуправляе
-
мые
выпрямители
,
а
АТО
6
выпускается
для
приводов
мощностью
до
37
кВт
.
Приложение
Д
Станции
управления
двигателями
Д
.1.
Станция
управления
двигателем
постоянного
тока
параллельного
возбуждения
с
ослаблением
магнитного
потока
[23]
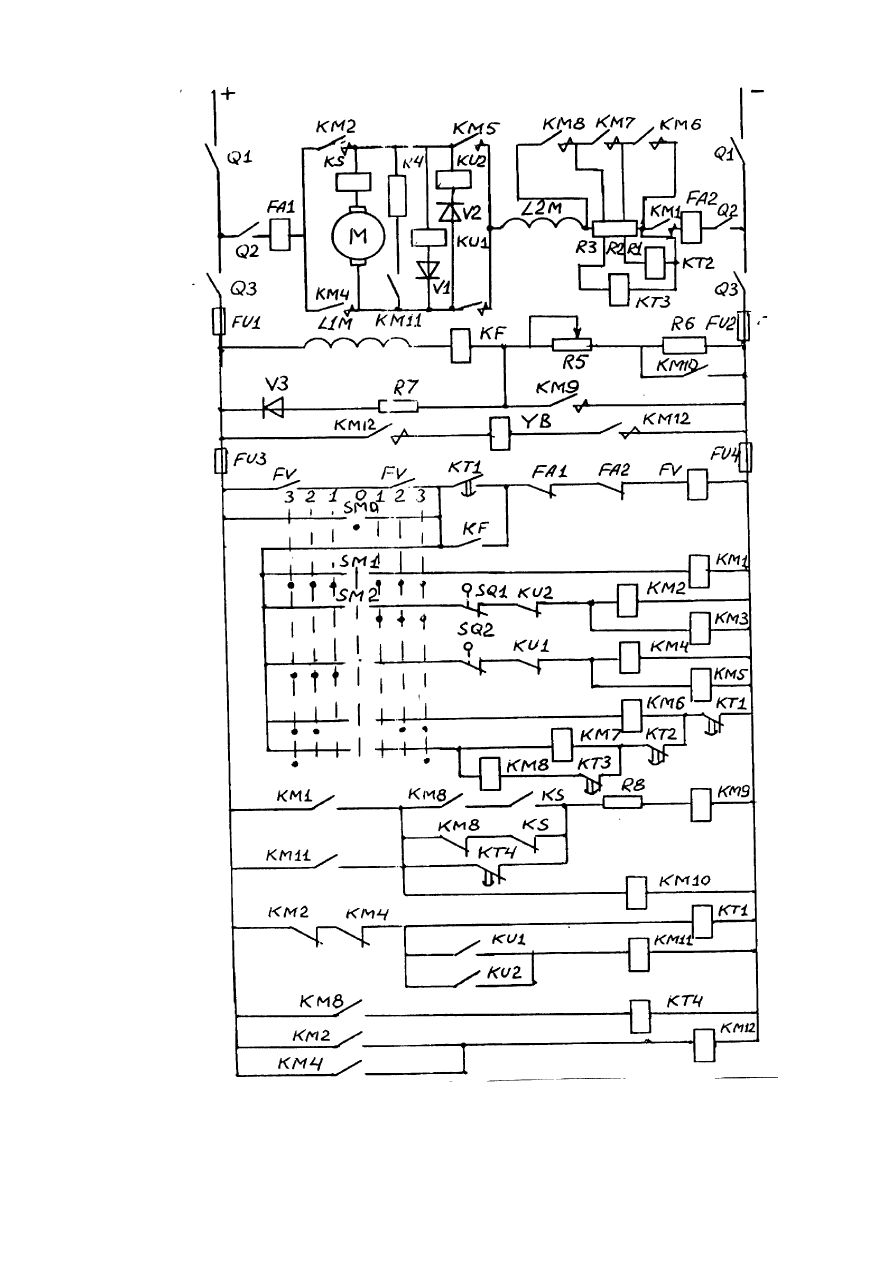
На
рис
.
Д
.1
приведена
схема
станции
управления
серии
ПУ
1321.
Схема
мо
-
жет
применяться
для
двигателей
средней
и
большой
мощности
,
работающих
в
по
-
вторно
-
кратковременных
режимах
с
изменяющейся
нагрузкой
.
Обозначение
элементов
в
схеме
.
M, L1M, L2M –
якорь
и
обмотки
возбуждения
двигателя
;
контакторы
:
КМ
1 –
ли
-
нейный
,
КМ
2 –
КМ
5 –
реверсирующие
,
КМ
6 –
КМ
8 –
ускорения
,
КМ
9 –
управле
-
ния
полем
,
КМ
11,
КМ
12 –
динамического
и
механического
торможений
,
КМ
10 –
экономический
;
реле
:
КТ
1 –
КТ
3 –
ускорения
, KS –
управления
полем
,
КТ
4 –
контроля
ускорения
, KU1, KU2 –
динамического
торможения
“
Вперед
”
и
“
Назад
”,
FA1, FA2 –
максимальные
токовые
, FV –
напряжения
, KF–
обрыва
поля
;
резисто
-
ры
: R1 – R3-
ускорения
, R5 –
регулятор
возбуждения
, R4
и
R7 –
тормозной
и
раз
-
рядный
; SM0 – SM5 –
контакты
командоконтроллера
; SQ1, SQ2 –
контакты
ко
-
нечных
выключателей
; V1 – V3 –
диоды
.
Схема
позволяет
регулировать
скорость
вниз
от
основной
командоконтрол
-
лером
SM,
а
вверх
–
регулятором
возбуждения
R5
и
предусматривает
работу
дви
-
гателя
на
любой
скорости
в
соответствии
с
искусственными
характеристиками
,
заданными
SM4, SM5.
При
третьем
положении
SM (
закрыты
SM1 – SM5)
схема
обеспечивает
автоматический
трехступенчатый
реостатный
пуск
двигателя
до
ос
-
новной
скорости
при
номинальном
магнитном
потоке
(
контакторы
KM1 – KM8)
с
управлением
по
принципу
времени
(
реле
КТ
1 –
КТ
3)
и
пуск
до
скорости
выше
ос
-
новной
за
счет
ослабления
магнитного
потока
,
заданного
резистором
R5
управле
-
нием
по
вибрационному
токовому
принципу
(
реле
KS).
Реверсирование
двигате
-
ля
,
возникающее
при
перестановке
SM
из
одного
положения
в
другое
,
происходит
с
97
с
Рис
.
Д
.1
Схема
управления
двигателем
постоянного
тока
98
динамическим
(
КМ
11
включен
)
и
механическим
(
КМ
12
отключен
)
торможением
с
управлением
по
принципу
скорости
(
реле
KU1
или
KU2)
с
одновременным
пред
-
варительным
усилением
магнитного
потока
с
управлением
по
вибрационному
то
-
ковому
принципу
(
реле
KS).
При
остановке
происходит
динамическое
и
механи
-
ческое
торможение
,
так
же
как
и
при
реверсировании
.
В
схеме
предусмотрены
защиты
:
максимальная
токовая
(FA)
и
нулевая
(FV),
от
обрыва
цепи
обмотки
возбуждения
(KF)
и
от
перенапряжения
на
ней
(R7).
Цепи
управления
защищены
плавкими
предохранителями
(FU1, FU2).
В
схеме
имеются
путевые
блокировки
,
осуществляемые
конечными
выключателями
SQ1
и
SQ2,
обеспечивающие
отключение
контакторов
КМ
2,
КМ
3
и
КМ
4,
КМ
5,
отключающих
двигатель
в
крайних
положениях
механизма
.
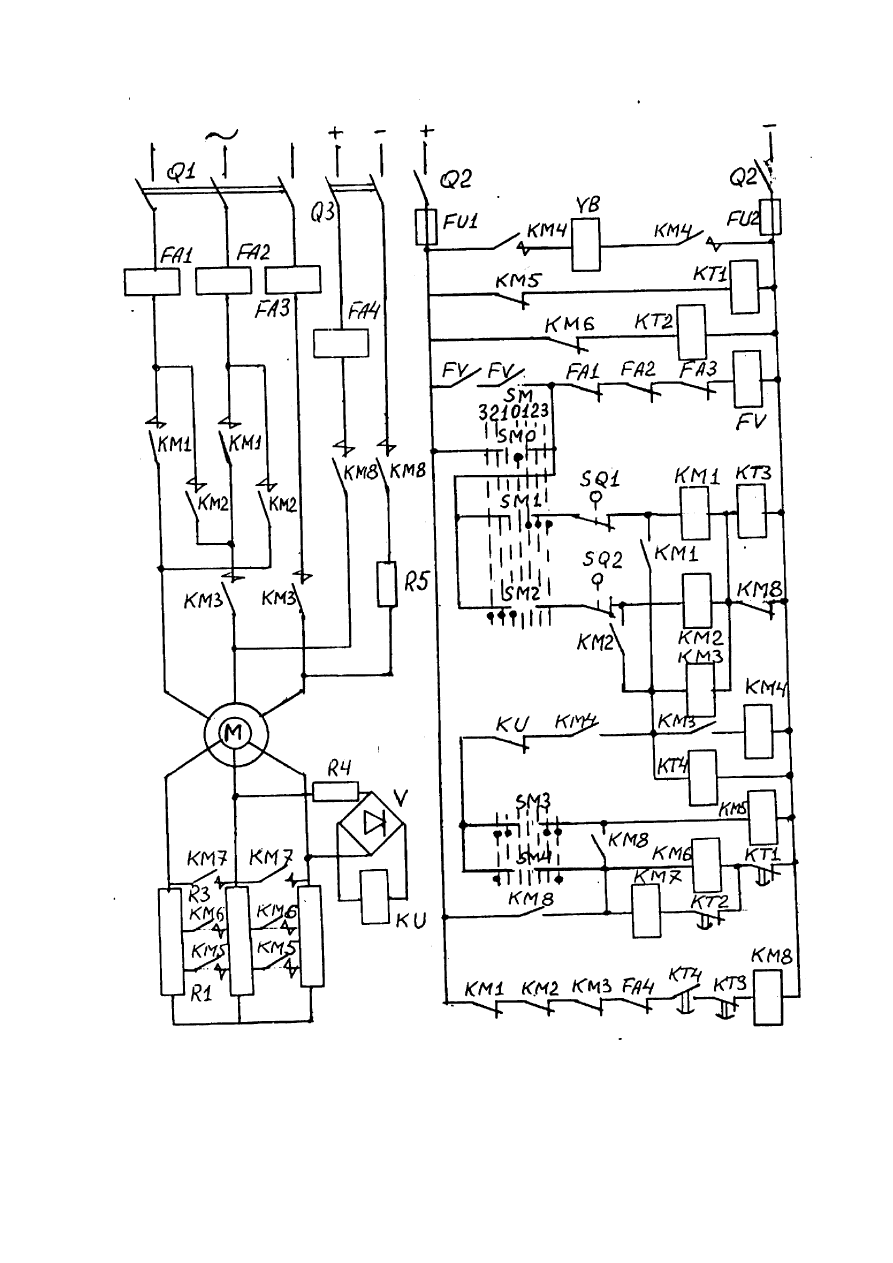
Д
.2.
Станция
управления
асинхронным
двигателем
с
фазным
ротором
[23]
На
рис
.
Д
.2
приведена
схема
станции
управления
серии
ПУ
6520.
Схема
при
-
меняется
для
двигателей
средней
и
большой
мощности
при
напряженном
повтор
-
но
-
кратковременном
режиме
(
до
1200
включений
в
час
)
с
переменной
нагрузкой
.
Обозначение
элементов
в
схеме
:
М
–
асинхронный
двигатель
;
контакторы
:
КМ
3 –
линейный
,
КМ
1,
КМ
2 –
реверси
-
рующие
,
КМ
6,
КМ
7 –
ускоряющие
,
КМ
5 –
противовключения
,
КМ
8 –
динамиче
-
ского
торможения
,
КМ
4 –
механического
торможения
;
реле
: FV –
напряжения
,
КТ
1,
КТ
2 –
ускорения
, KU –
противовключения
,
КТ
3
и
КТ
4 –
блокировочное
и
динамического
торможения
, FA1 – FA4 –
максимально
-
токовые
; SM0 – SM4 –
контакты
командоконтроллера
; SQ1, SQ2 –
контакты
ко
-
нечных
выключателей
; V –
выпрямитель
;
резисторы
: R1 –
противовключения
, R2,
R3 –
ускорения
, R5 –
торможения
; YB –
катушка
электромагнитного
тормоза
.
Схема
осуществляет
автоматический
пуск
двигателя
с
двумя
ступенями
со
-
противлений
в
роторе
с
управлением
по
принципу
времени
(
реле
КТ
1
и
КТ
2).
При
реверсе
происходит
торможение
противовключением
при
полном
сопротивлении
в
роторе
с
управлением
по
принципу
скорости
(
частоты
вращения
) (
реле
KU).
При
остановке
осуществляется
динамическое
торможение
с
постепенным
отключени
-
ем
резисторов
в
роторе
(
реле
КТ
1,
КТ
2)
с
управлением
по
принципу
времени
(
ре
-
ле
КТ
4).
Реле
КТ
3
позволяет
прервать
торможение
и
обеспечить
повторное
вклю
-
чение
двигателя
.
При
остановке
“
накладывается
”
механический
тормоз
YB.
В
схеме
предусмотрены
защиты
–
максимальная
мгновенная
токовая
в
глав
-
ных
цепях
(FA1, FA2, FA3)
и
цепи
динамического
торможения
(FA4),
максималь
-
но
-
токовая
(FU1, FU2)
и
нулевая
(FV)
в
цепи
управления
.
99
Рис
.
Д
.2
Схема
управления
асинхронным
двигателем
с
фазным
ротором

100
Приложение
Е
Программа
HARAD
.
Расчет
характеристик
асинхронного
двигателя
Программа
позволяет
рассчитать
механическую
ω
(
М
),
электромеханиче
-
ские
ω
(I
1
, I
2
′
, I
µ
),
энергетические
η
(
ω
,
М
), cos
ϕ
(
ω
,
М
)
характеристики
асинхронно
-
го
двигателя
.
Характеристики
рассчитываются
для
заданных
значений
частоты
и
напряжения
(
или
тока
)
на
базе
Т
-
образной
схемы
замещения
двигателя
.
При
рас
-
чёте
учитываются
внутренние
эквивалентные
сопротивления
источников
преоб
-
разователей
как
в
цепи
статора
,
так
и
в
цепи
ротора
.
Исходные
данные
для
расчёта
.
Номинальная
синхронная
скорость
,
рад
/
с
ω
0
н
Номинальный
ток
статора
,
А
I
1
н
Номинальный
момент
,
Н
*
м
М
н
Активное
сопротивление
статора
,
Ом
r
1
Приведенное
активное
сопротивление
ротора
,
Ом
r´
2
Индуктивное
сопротивление
рассеяния
статора
,
Ом
x
1
Приведенное
индуктивное
сопротивление
рассеяния
ротора
x´
2
На
вид
характеристик
существенно
влияет
индуктивное
сопротивление
контура
намагничивания
X
µ
,
величина
которого
зависит
от
тока
намагничивания
и
определяется
кривой
намагничивания
E = f(I
µ
).
В
программе
использована
уни
-
версальная
кривая
намагничивания
двигателей
типа
MTF (MTH).
В
приближенных
расчётах
можно
принять
const
x
I
U
x
1
н
1
=
−
≅
µ
µ
.
Для
расчёта
характеристик
вводятся
также
частота
f
1
,
напряжение
фазное
U
1
(
или
ток
статора
I
1
),
диапазон
рассчитываемых
скоростей
от
минимальной
(
на
-
чальной
)
до
максимальной
(
конечной
)
и
интервал
между
соседними
скоростями
(
шаг
по
скорости
).
Расчёт
выполняется
для
заданного
значения
скольжения
.
Основные
уравнения
:
1
н
1
/f
f
α
=
;
2
1
2
1
1
)
x
(
α
r
Z
⋅
+
=
;
2
2
2
2
2
)
x'
(
α
/S)
(r'
Z
⋅
+
=
;
µ
µ
x
α
Z
⋅
=
;
)
µ
Z
2
Z
/(
µ
Z
2
Z
12
Z
&
&
&
&
&
+
⋅
=
;
11
1
Σ
Z
Z
Z
&
&
&
+
=
;
Σ
1
1
Σ
1
1
Z
I
U
Z
/
U
I
или
&
&
&
&
&
&
⋅
=
=
;
11
1
Z
I
E
&
&
&
⋅
=
;