Файл: Курсовая работа по дисциплине Цифровые системы управления в мехатронике.doc
Добавлен: 22.11.2023
Просмотров: 131
Скачиваний: 6
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
Министерство науки и высшего образования Российской Федерации
Федеральное государственное бюджетное
образовательное учреждение высшего образования
«Казанский государственный энергетический университет»
КУРСОВАЯ РАБОТА
по дисциплине
«Цифровые системы управления в мехатронике»
(кафедра ПМ)
РАСЧЁТ И ИССЛЕДОВАНИЕ ЦИФРО- АНАЛОГОВОЙ СИСТЕМЫ УПРАВЛЕНИЯ
Выполнил
Ф.И.О. студента, № группы подпись
Руководитель работы_
Ф.И.О. руководителя подпись
«»20г.
Работа защищена с оценкой_
Казань 2023
СОДЕРЖАНИЕ
| 1. Выбор и расчет элементов непрерывной части цифро-аналоговой системы управления | |
| 1.1 Выбор и расчет двигателя. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . | 3 |
| 2. Оптимизация контура скорости | |
| 2.1 Синтез регулятора скорости . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . | 9 |
| 3. Программная реализация цифрового регулятора скорости и моделирование контура скорости | |
| 3.1 Программная реализация регулятора скорости и моделирование контура скорости. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . | 16 |
| 3.2 Реализация ССДМ КС с цифровым регулятором скорости и получение переходных характеристик по управляющему и возмущающему воздействиям. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . | 17 |
| 3.3 Построение графика ЛЧХ разомкнутого КС. Анализ результатов моделирования. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . | 22 |
| 4. Синтез регулятора положения | |
| 4.1 Синтез регулятора положения в системе с астатизмом первого порядка. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . | 25 |
| 5. Программная реализация регулятора положения | |
| 5.1 Определение алгоритма работы цифрового регулятора положения для электропривода с астатизмом первого порядка. . . . . . . . . . . . . . . . . . | 33 |
| 5.2 Моделирование электропривода с астатизмом первого порядка. . . . . . . . . . . . . . . . . . | 35 |
| Библиографический список . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . | 41 |
-
ВЫБОР И РАСЧЁТ ЭЛЕМЕНТОВ НЕПРЕРЫВНОЙ ЧАСТИ
ЦИФРО-АНАЛОГОВОЙ СИСТЕМЫ УПРАВЛЕНИЯ
-
Выбор и расчет двигателя
Вариант 58
Исходные данные Таблица 1.1
| Jн, кгм2 | Мс, Нм | max, | max, | Кбп | Тбп, С | Кдп | М | рп | Ттг,с | | мин | | |
| 160 | 165 | 33 | 22 | 14 | 0,003 | 38 | 1,3 | 1 | 0,007 | 0,85 | 10 | 35 | 1 |
Исходные данные:
- момент инерции нагрузки Jн = 160 кгм2;
- момент сопротивления нагрузки
- максимальная угловая скорость нагрузки Ώmax = 33 град/с;
- максимальное угловое ускорение нагрузки εmax = 22 град/с2.
1. Рассчитываем требуемую мощность по формуле:

.
2. Выбираем двигатель, номинальная мощность которого
Рном ≥ Ртр.
Из таблицы технических данных двигателей серии МИ (см. табл. 1.2) следует, что двигатели МИ-22, МИ-31 и МИ-32 подходят по значению мощности на валу Рном = 0,37 кВт. При этом МИ-32 имеет частоту вращения nном = 1000
и большой момент инерции Jдв = 135∙10– 4. кг∙м2, т.е. не подходит с точки зрения обеспечения конструктивных требований. Двигатель МИ-31 имеет большую частоту вращения nном = 2000
Технические данные двигателя Таблица 1.2
| Тип двигателя | Мощность на валу | Частота вращения | Напряжение питания | Ток якоря | Сопротивление обмотки якоря | Момент номинальный | Момент инерции Jдв∙10– 4, кг∙м2 |
| МИ-22 | 0,37 | 3000 | 60 | 8,2 | 0,192 | 1,2 | 40,8 |
3.Рассчитываем оптимальное передаточное число редуктора, согласно:
 .
.
4. Проверяем выбранный двигатель на соответствие требований по скорости.
Определим номинальную угловую скорость
и приведенную к валу двигателя угловую скорость поворота нагрузки
Так как 314,159 рад/с > 233,8947 рад/с, то требования по скорости выполняются.
5. Рассчитываем значение требуемого вращающего момента в соответствии с выражением (i= i1).
 Н∙м
Н∙м6. Проверяем выбранный двигатель на соответствие требований по моменту:
 ,
, Н∙м.
Н∙м.Расчеты показали, что требования по моменту выполняются.
7. Рассчитываем параметры динамической модели двигателя:
1) определяем коэффициент противо-ЭДС по формуле :
2) определяем коэффициент момента по формуле:
3) определяем электромеханическую постоянную времени двигателя:
 с;
с;4) определяем электромагнитную постоянную времени двигателя. Индуктивность якорной цепи:
Тогда
 с;
с;5) Строим структурную схему динамической модели двигателя, изображенную на рисунке 1.1:
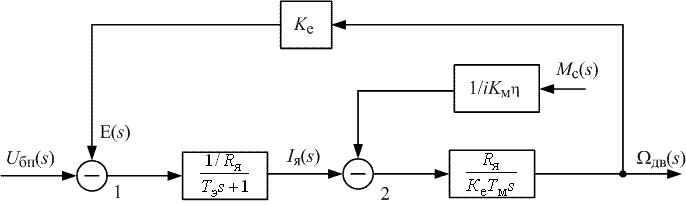
Рис. 1.1. Структурная схема динамической модели двигателя
Полученная ССДМ двигателя представлена на рис. 1.2.
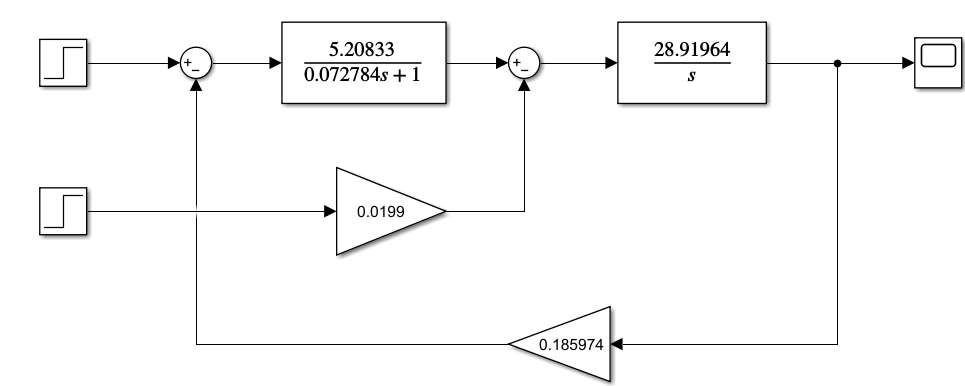
Рис. 1.2. ССДМ двигателя постоянного тока
На рис. 1.3 и рис. 1.4 представлены результаты моделирования
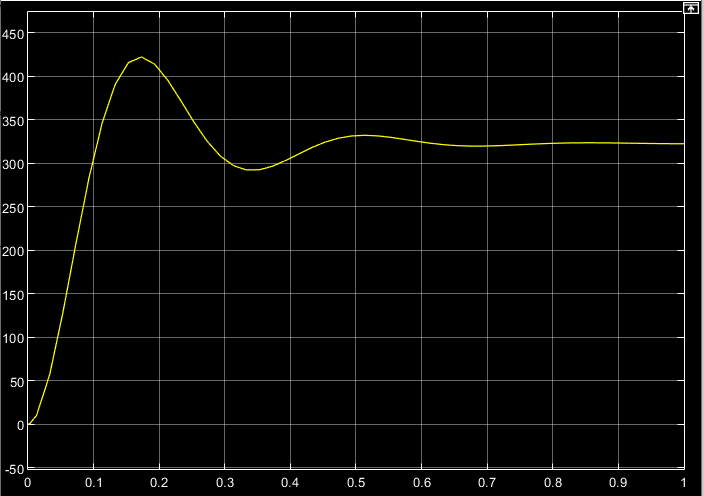 t, c
t, cРис. 1.3. Переходная характеристика двигателя по управляющему воздействию
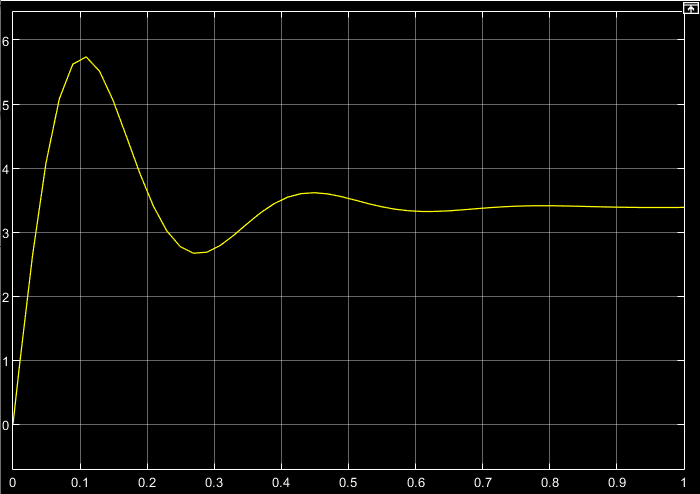 t, c
t, c