Файл: Курсовая работа по дисциплине Цифровые системы управления в мехатронике.doc
Добавлен: 22.11.2023
Просмотров: 134
Скачиваний: 6
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
Параметры двигателя, БП, ТГ и цифрового регулятора принять из пунктов 1.1, 2.1, 3.1. Коэффициент передачи АЦП Кvz2 = 1.
1. Для моделирования построим ССДМ КС с цифровым регулятором скорости в системе Simulink (рис. 3.1).
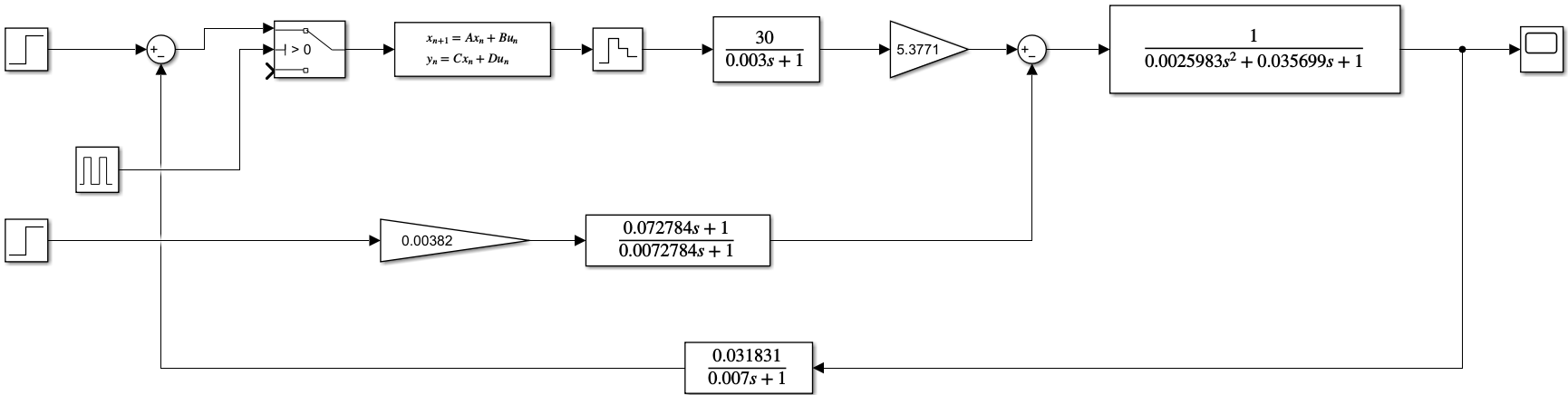
Рис. 3.1. Структурная схема динамической модели контура скорости
с цифровым регулятором скорости
Цифровой регулятор скорости реализован блоком Discrete State-Space, расположенным в библиотеке блоков Discrete. Диалоговое окно блока представлено на рис. 3.2.
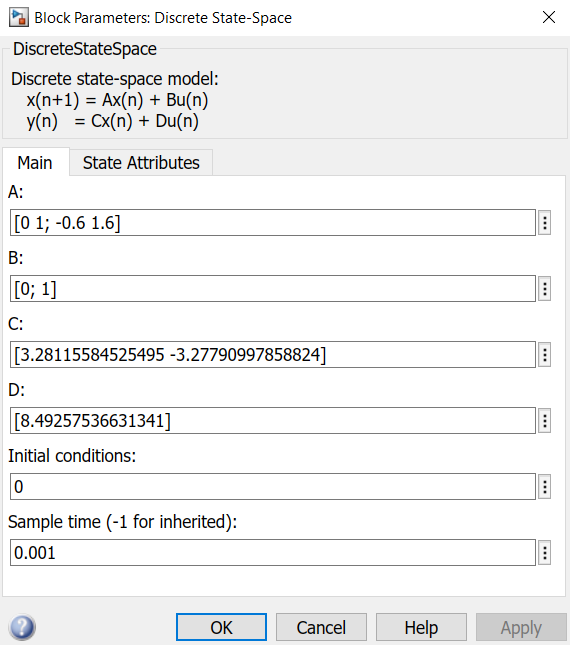
Рис. 3.2. Диалоговое окно блока Discrete State-Space
Блок Zero-Order Hold представляет собой экстраполятор нулевого порядка, восстанавливающий непрерывный сигнал uрс с выхода цифрового регулятора скорости. Блок Switch реализует модель квантователя, преобразующего непрерывный сигнал рассогласования∆uΩ в дискретный. Блок Pulse Generator формирует последовательность единичных импульсов с периодом следования Т0.
Для задания параметров блока Zero-Order Hold необходимо в строке Sample time установить период квантования Т0 (рис. 3.3).
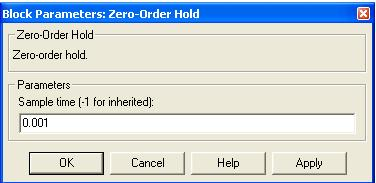
Рис. 3.3. Диалоговое окно блока Zero-Order Hold
Для задания параметров блока Pulse Generator необходимо в строке Period установить период квантования Т0 (рис. 3.4).
Рис. 3.4. Диалоговое окно блока Pulse Generator
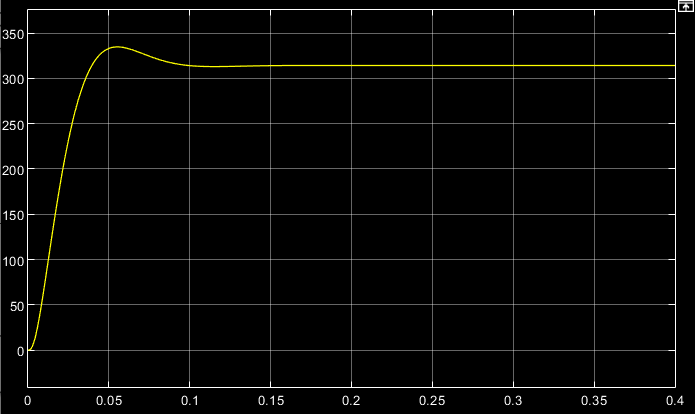
2. Для получения графика в блоке Step задаём входное воздействие
Ω(t), рад/с
 t, c
t, cРис. 3.5. Переходная характеристика контура скорости по управляющему воздействию
Ω(t), рад/с
 t, c
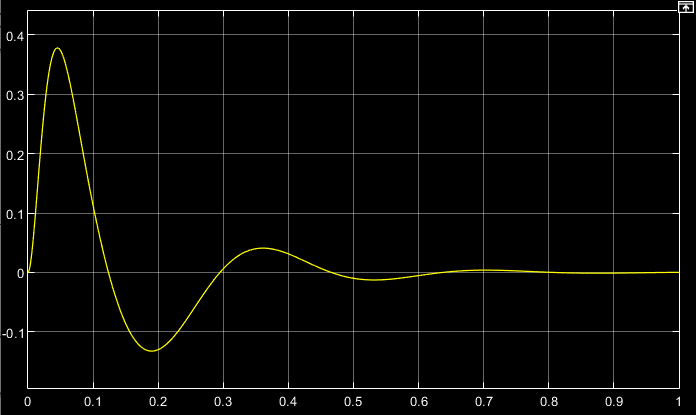
t, cРис.3.6. Переходная характеристика контура скорости по моменту
сопротивления
Для построения переходной характеристики по моменту сопротивления нагрузки
-
Переходим к анализу полученных графиков. По характеристике на рис. 3.5 определяем максимальное значение угловой скорости вращения ЭД Ωmax = 334,74 рад/с и установившееся значение Ωуст = 314,158 рад/с. По этим данным рассчитываем перерегулирование
 .
.Время нарастания
Проверяем соответствия требованиям настройки на ОМ
Анализ полученных результатов показывает, что дискретная аппроксимация регулятора скорости привела к уменьшению запасов устойчивости, поэтому перерегулирование σ увеличилось, а время нарастания
3.3. Построение графика ЛЧХ разомкнутого КС. Анализ результатов моделирования.
Для расчетов принять период квантования Т0 = 0,002 с.
Для построения частотных характеристик к выражению (2.1) применим z-преобразование в соответствии с формулой трапеций. Числовые значения коэффициентов разомкнутого контура скорости получены в пункте 2.1 (программа построения ЛЧХ).
Программа для перехода переменной zзаписывается в Command Window следующим образом:
num = [0.01334 0.1833 5.135];
den = [1.345e-11 1.331e-08 4.028e-06 0.000378 0.005878 0.1232 0];
Fs=500;
[numd,dend] = bilinear(num,den,Fs)
Результат:
numd =
0.000434 0.00088 -0.000396 -0.0017 -0.000455 0.000833 0.000422
dend =
1.0000 -4.5547 8.4406 -8.112 4.2427 -1.1382 0.12161
В приведённой программе частота дискретизации
Гц.
Полученные численные значения позволяют записать передаточную функцию разомкнутого контура скорости относительно переменной z:
 ,
, где b6= 0.000434;b5= 0.00088; b4= -0.000396; b3= -0.0017; b2= -0.000455; b1= 0.000833; b0= 0.000422;
d6= 1,0; d5= -4.5547; d4= 8.4406; d3= -8.112;d2= 4.2427; d1= -1.1382; d0= 0.12161.
К полученному выражению применим
После вычисления коэффициентов при переменной υ и приведения к стандартному виду, получим
 .
.Далее переходим к построению логарифмических псевдочастотных характеристик (ЛПЧХ) в соответствии с программой:
w = logspace(-3, 3);
num = [0 0 0 0 27391 376 10.5];
den = [
bode(num, den, w)
Результаты моделирования представлены на рис. 3.7.
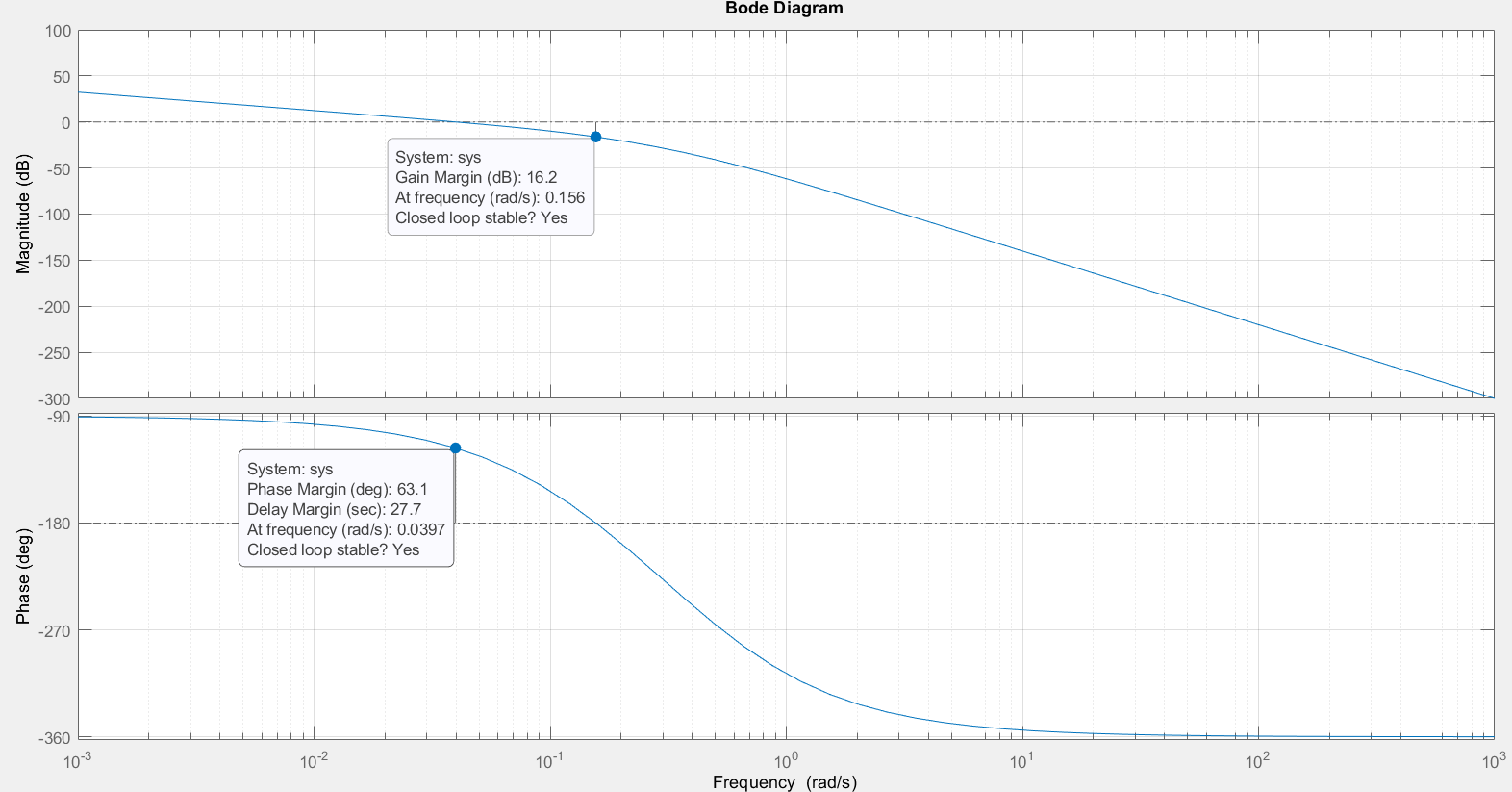
Рис. 3.7. Логарифмические псевдочастотные характеристики
контура скорости
При увеличении перерегулирования (см. пункт 3.2) запасы устойчивости по фазе и амплитуде не изменились по сравнению с аналоговым контуром скорости. Так, запас устойчивости по фазе на псевдочастоте среза
а запас устойчивости по амплитуде на псевдочастоте
При переходе к абсолютной псевдочастоте среза
 с– 1,
с– 1,а частота
 с– 1.
с– 1.Графики ЛПЧХ сдвигаются вправо относительно оси частот на величину
4.СИНТЕЗ РЕГУЛЯТОРА ПОЛОЖЕНИЯ
4.1. Синтез регулятора положения в системе с астатизмом первого порядка
Синтезируем регулятор положения с применением ЛЧХ на основе критерия динамической точности системы. Для расчётов примем следующие параметры:
- максимальная угловая скорость нагрузки Ώmax = 33 град/с;
- максимальное угловое ускорение нагрузки εmax = 22 град/с2;
- ошибка по скорости = 10 мин;
- ошибка по ускорению = 35 мин.
Моментную составляющую ошибки определяем при отработке квадратично возрастающего момента сопротивления
 . Определяем параметры желаемой передаточной функции ЭП (4.8).
. Определяем параметры желаемой передаточной функции ЭП (4.8). Коэффициент передачи по скорости
 с– 1.
с– 1.Коэффициент передачи по ускорению
 с– 2.
с– 2.Значение базовой частоты будет равно
По выражениям (4.8) рассчитываем постоянные времени
 с;
с; с.
с.Рассчитываем протяжённость среднечастотного участка желаемой ЛАХ
 .
.Частоту, соответствующую максимальному запасу по фазе определяем по формуле
 с– 1.
с– 1.По условию обеспечения максимального запаса по фазе находим постоянную времени
Принимаем
С учётом проведённых расчётов желаемая передаточная функция ЭП с астатизмом первого порядка запишется как
 .
.2. Для построения ССДМ неизменяемой части ЭП запишем исходные данные тахогенератора и параметры контура скорости:
- коэффициент передачи тахогенератора Ктг = 0,031831 В·с/рад;
- постоянная времени тахогенератора Ттг = 0,007 с;
- суммарная малая постоянная времени КС
- коэффициент передачи датчика положения Кдп = 38 рад/В;
- передаточное число редуктора i = 404.
Передаточная функция замкнутого контура скорости
 .
.3. Составляем программу 1 в среде MatLab для определения передаточной функции регулятора положения ЭП с астатизмом первого порядка.
Программа 1
num1=[127.1645 280.01428];
den1=[0.043251 2.02162 1 0];
sys1=tf(num1, den1);
num2=[8.35663 1193.805];
den2=[0.116352 9.696 404 0];
sys2=tf(num2, den2);
sys=sys1/sys2
Transfer function:
14.8 s^4 + 1266 s^3 + 5.409e04 s^2 + 1.131e05 s
-----------------------------------------------
0.3614 s^4 + 68.53 s^3 + 2422 s^2 + 1194 s
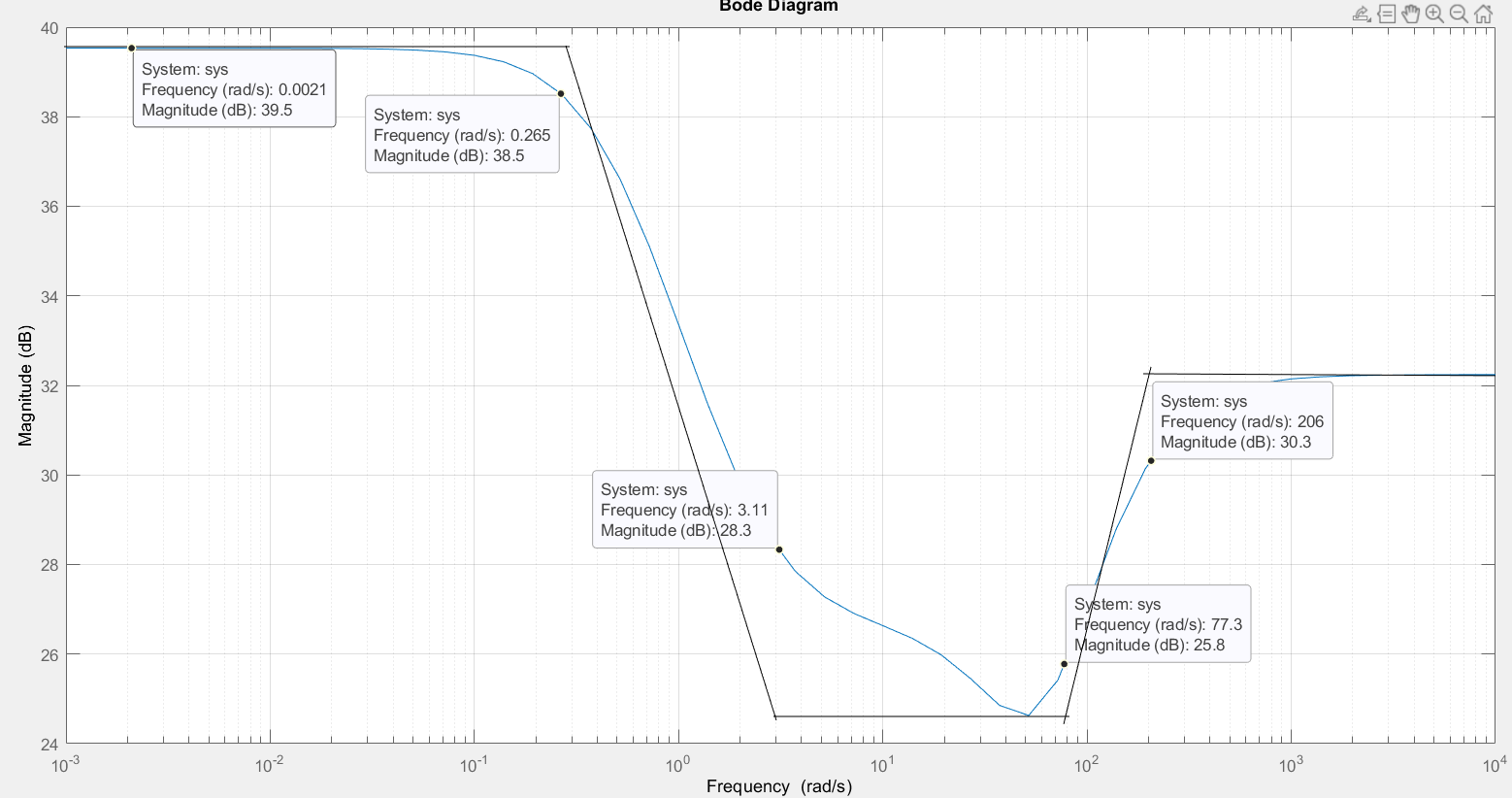
4. Составляем программу 2 в среде MatLab для определения ЛАЧХ регулятора положения, представленную на рис. 4.1.
Программа 2
w=logspace(-3, 4);
num=[14.8 1266 5.409e04 1.131e05 0];
den=[0.3614 68.53 2422 1194 0];
bode(num, den, w)
Переходим к анализу полученных графиков. Низкочастотный участок ЛАЧХ РП проходит параллельно оси частот, постепенно изменяя наклон к среднечастотному участку в пределах от 0 до –20 дБ/дек и далее к 0 дБ/дек. Высокочастотный участок ЛАЧХ с увеличением частоты изменяет свой наклон также в пределах от 20 до 0 дБ/дек. Полученные ЛАЧХ следует аппроксимировать пятью асимптотами и придать регулятору положения свойства интегро-дифференцирующего регулятора.