Файл: Курсовая работа по дисциплине Цифровые системы управления в мехатронике.doc
Добавлен: 22.11.2023
Просмотров: 135
Скачиваний: 6
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
= 0,57894.
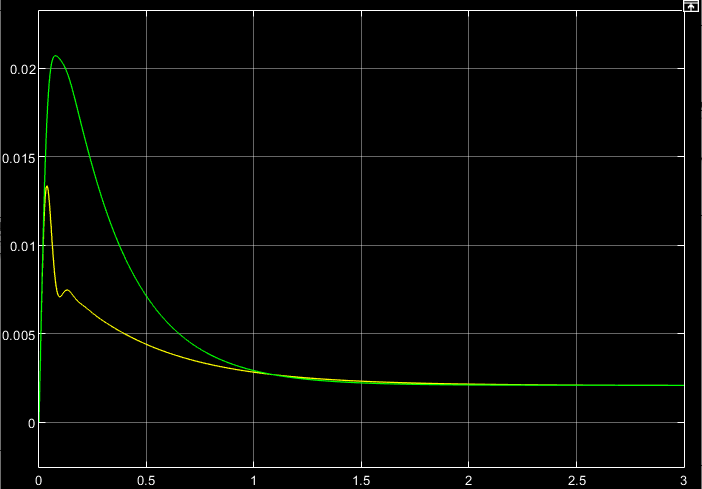
Результаты моделирования регистрируются блоком Scope2 и показаны на рис. 5.5. Из анализа графиков следует, что аналитический способ синтеза цифрового регулятора (график 1) даёт более высокую точность и установившаяся ошибка (7,461 мин), тогда как цифровой ИД-регулятор, синтезированный графоаналитическим способом снижает точность и установившаяся ошибка (см. график 2)
(7,461 мин), тогда как цифровой ИД-регулятор, синтезированный графоаналитическим способом снижает точность и установившаяся ошибка (см. график 2)  = 0,0020804(7,5 мин). Данное снижение точности может быть вызвано погрешностью графического определения коэффициента передачи ИД-регулятора
= 0,0020804(7,5 мин). Данное снижение точности может быть вызвано погрешностью графического определения коэффициента передачи ИД-регулятора  .
.
2
1
 t, c
t, c
Рис. 5.5. График ошибки системы при линейно возрастающем
задающем воздействии
1
2
 t, c
t, c
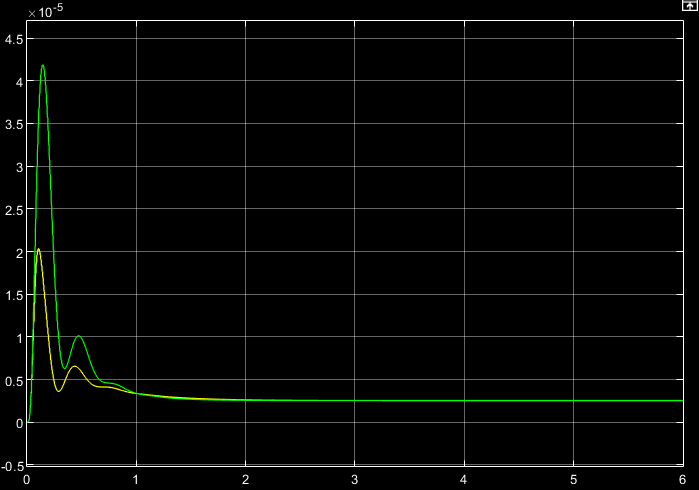
Рис. 5.6. Графики моментной составляющей ошибки системы при линейно
возрастающем моменте сопротивления
Из анализа графиков, представленных на рис. 5.6, следует, что моментная составляющая ошибок системы сравнительно невелика и при аналитическом способе синтеза цифрового регулятора (график 1) установившаяся ошибка мала и составляет . Цифровой ИД-регулятор, синтезированный графоаналитическим способом, снижает точность и установившаяся ошибка, равная
. Цифровой ИД-регулятор, синтезированный графоаналитическим способом, снижает точность и установившаяся ошибка, равная  , показана на графике 2.
, показана на графике 2.
БИБЛИОГРАФИЧЕСКИЙ СПИСОК
1. Башарин А. В., Новиков В. А., Соколовский Г. Г. Управление электроприводами: Учебное пособие для вузов. – Л.: Энергоиздат. Ленингр. отд-ние, 1982.
2. Бесекерский В.А. Цифровые автоматические системы. «Наука», Главная редакция физико-математической литературы. – М., 1976.
3. Волков Н. И., Миловзоров В. П. Электромашинные устройства автоматики. – М.: Высш. шк., 1986.
4. Динамика систем управления ракет с бортовыми ЦВМ. Под ред.
М. С. Хитрика, С. М. Фёдорова. – М.: Машиностроение, 1972.
5. Изерман Р. Цифровые системы управления: Пер. с англ. – М.: Мир, 1984.
6. Куо Б. Теория и проектирование цифровых систем управления. М.: Машиностроение, 1986.
7. Острём К., Виттенмарк Б. Системы управления с ЭВМ: Пер. с англ. –М.: Мир, 1987.
8. Ротач В. Я. Теория автоматического управления: Учебник для вузов. – 3-е изд., стереот. – М.: Издательство МЭИ, 2005.
9. Рудаков В. В. и др. Системы непрерывного управления электроприводами. – Л.: Наука, 1968.
10. Справочник по теории автоматического управления / Под ред. А. А. Красовского. – М.: Наука. Гл. ред. физ.-мат. лит., 1987.
11. Теория линейных систем автоматического регулирования и управления. Попов Е. П. Гл. ред. физ.-мат. лит. изд-ва «Наука», 1978.
12. Топчеев Ю. Атлас для проектирования систем автоматического регулирования. – М.: Машиностроение, 1989.
13. Ту Ю. Современная теория управления. Пер. с англ. – М.: Машиностроение, 1971.
Результаты моделирования регистрируются блоком Scope2 и показаны на рис. 5.5. Из анализа графиков следует, что аналитический способ синтеза цифрового регулятора (график 1) даёт более высокую точность и установившаяся ошибка
2
1
t, cРис. 5.5. График ошибки системы при линейно возрастающем
задающем воздействии
1
2
t, cРис. 5.6. Графики моментной составляющей ошибки системы при линейно
возрастающем моменте сопротивления
Из анализа графиков, представленных на рис. 5.6, следует, что моментная составляющая ошибок системы сравнительно невелика и при аналитическом способе синтеза цифрового регулятора (график 1) установившаяся ошибка мала и составляет
БИБЛИОГРАФИЧЕСКИЙ СПИСОК
1. Башарин А. В., Новиков В. А., Соколовский Г. Г. Управление электроприводами: Учебное пособие для вузов. – Л.: Энергоиздат. Ленингр. отд-ние, 1982.
2. Бесекерский В.А. Цифровые автоматические системы. «Наука», Главная редакция физико-математической литературы. – М., 1976.
3. Волков Н. И., Миловзоров В. П. Электромашинные устройства автоматики. – М.: Высш. шк., 1986.
4. Динамика систем управления ракет с бортовыми ЦВМ. Под ред.
М. С. Хитрика, С. М. Фёдорова. – М.: Машиностроение, 1972.
5. Изерман Р. Цифровые системы управления: Пер. с англ. – М.: Мир, 1984.
6. Куо Б. Теория и проектирование цифровых систем управления. М.: Машиностроение, 1986.
7. Острём К., Виттенмарк Б. Системы управления с ЭВМ: Пер. с англ. –М.: Мир, 1987.
8. Ротач В. Я. Теория автоматического управления: Учебник для вузов. – 3-е изд., стереот. – М.: Издательство МЭИ, 2005.
9. Рудаков В. В. и др. Системы непрерывного управления электроприводами. – Л.: Наука, 1968.
10. Справочник по теории автоматического управления / Под ред. А. А. Красовского. – М.: Наука. Гл. ред. физ.-мат. лит., 1987.
11. Теория линейных систем автоматического регулирования и управления. Попов Е. П. Гл. ред. физ.-мат. лит. изд-ва «Наука», 1978.
12. Топчеев Ю. Атлас для проектирования систем автоматического регулирования. – М.: Машиностроение, 1989.
13. Ту Ю. Современная теория управления. Пер. с англ. – М.: Машиностроение, 1971.