Файл: Курсовая работа по дисциплине Цифровые системы управления в мехатронике.doc
Добавлен: 22.11.2023
Просмотров: 133
Скачиваний: 6
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
Рис. 1.4. Переходная характеристика двигателя по моменту сопротивления
Установившиеся значения скорости вращения двигателя при наличии управляющего воздействия и момента сопротивления составляют, соответственно,
Определим относительную погрешность по формуле
 .
.Наличие моментной составляющей погрешности
2. ОПТИМИЗАЦИЯ КОНТУРА СКОРОСТИ
2.1. Синтез регулятора скорости
Начальные данные:
- постоянная времени БП Тбп = 0,003 с;
- постоянная времени ТГ Ттг = 0,007 с;
- момент сопротивления нагрузки
- входное напряжение суммирующего усилителя КС
- выходное напряжение усилителя регулятора скорости
Ктг =
 ;
;коэффициент передачи блока питания
 ;
;постоянные времени РС
 с.
с.Задаём Трс3 = 0,002 с.
Суммарная малая постоянная времени контура скорости
Для моделирования строим ССДМ КС по схеме на рис. 2.1.
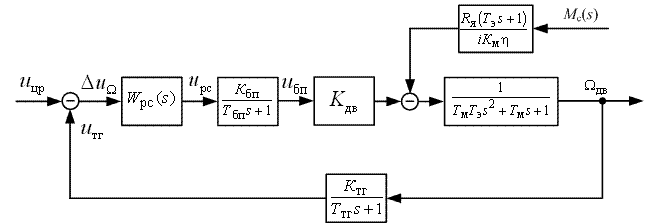
Рис. 2.1. Структурная схема динамической модели контура скорости
2. Реализацию динамического звена на входе воздействия момента сопротивления нагрузки (рис. 2.2) необходимо выполнить с добавлением удалённого полюса с малой постоянной времени
Коэффициент передачи двигателя по скорости.
Передаточная функция регулятора скорости
 .
.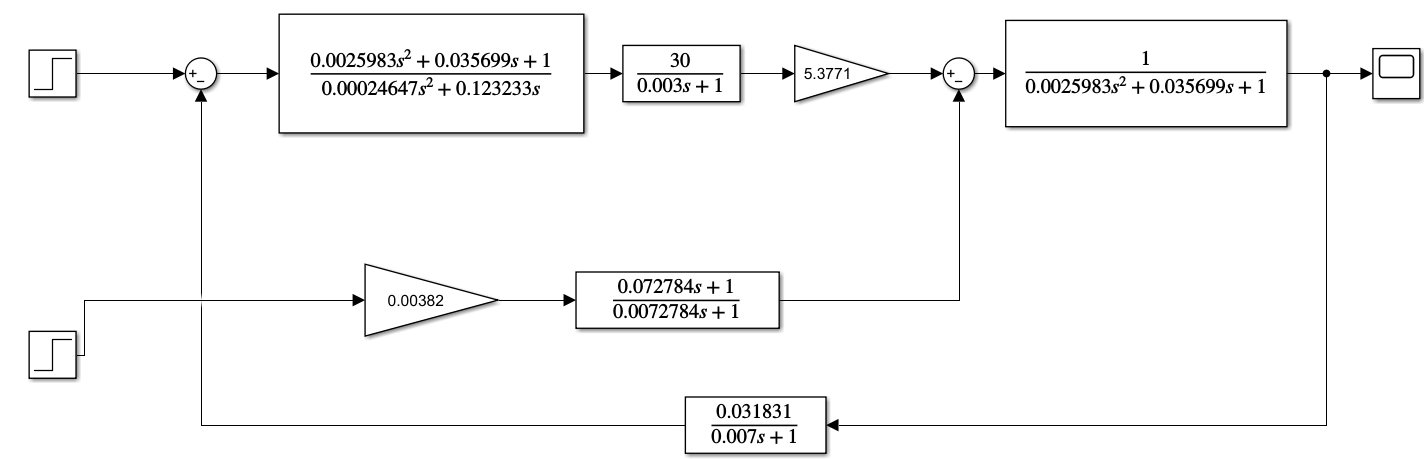
Рис. 2.2. Структурная схема динамической модели контура скорости
в системе Simulink
Для построения переходной характеристики по управляющему воздействию необходимо нажать пиктограмму Start Simulation. Перед этим устанавливается время интегрирования, в 6 ÷ 10 раз превышающее максимальную постоянную времени контура скорости (в меню Simulation Parameters на вкладке Solver устанавливается время интегрирования Stop Time).
Для моделирования в блоке Step задаём входное воздействие
Для построения переходной характеристики по моменту сопротивления нагрузки Мс устанавливаем соответственно в блоке Step входное воздействие
3. Переходим к анализу полученных графиков. По графику на рис. 2.3 определяем максимальное значение угловой скорости вращения двигателя Ωmax = 331,522 рад/с и установившееся значение скорости Ωуст = 314,176 рад/с. По этим данным рассчитываем перерегулирование
 .
.Перерегулирование, полученное в результате моделирования, отличается от требуемого значения 4,3 %. Такое изменение обусловлено влиянием малой постоянной времени Ттг. Если принять Ттг = 0, то перерегулирование будет равно 4,3 %, а передаточная функция ТГ представится безынерционным звеном
Wтг(s) = Ктг.
Ω(t), рад/с
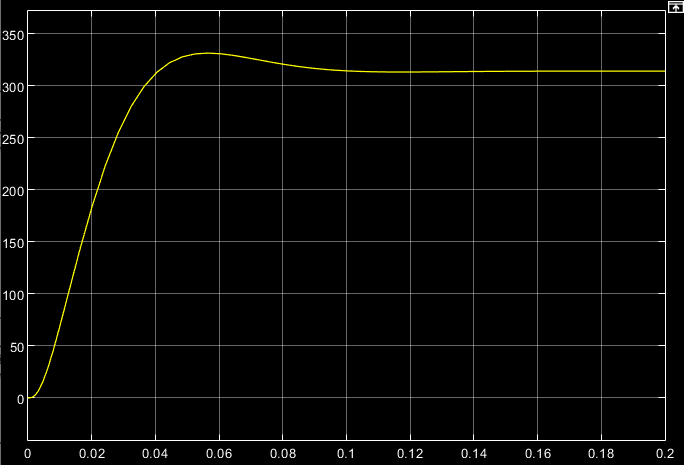 t, c
t, cРис. 2.3. Переходная характеристика контура скорости по управляющему воздействию
Ω(t), рад/с
 t, c
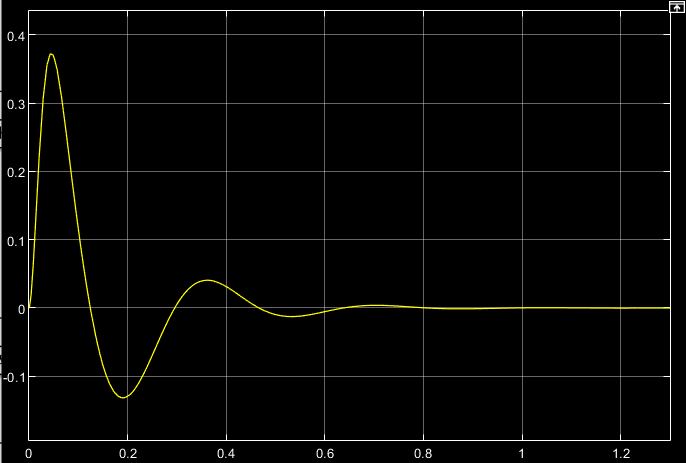
t, cРис. 2.4. Переходная характеристика контура скорости по моменту
сопротивления
При этом суммарную малую постоянную времени КС следует рассчитывать по формуле
Время нарастания
Проверяем соответствие полученного значения требованиям настройки на ОМ
Из анализа графика на рис. 2.4 следует, что при воздействии неизменного по величине момента сопротивления Мс моментная составляющая ошибки ΔΩм примерно через 0,8 с становится равной нулю. Это говорит о том, что искусственная механическая характеристика стала абсолютно жёсткой. Увеличение точности обусловлено наличием в структуре регулятора скорости интегральной составляющей.
4. Для построения ЛЧХ необходимо написать программу в Command Window системы MatLab. Поскольку ЛЧХ строятся на основе передаточной функции разомкнутого контура скорости, то все передаточные функции соответствующих элементов, входящих в него, необходимо перемножить и получить
Обозначая Wрс(s) = sys1, Wбп(s) = sys2, Wдв(s) = sys3, Wтг(s) = sys4, составляем программу в соответствии со следующим алгоритмом:
num1 = [0.0025983 0.035699 1];
den1 = [0.00024647 0.123233 0];
sys1 = tf(num1, den1);
num2 = [30];
den2 = [0.003 1];
sys2 = tf(num2, den2);
num3 = [5.3771];
den3 = [0.0025983 0.035699 1];
sys3 = tf(num3, den3);
num4 = [0.031831];
den4 = [0.007 1];
sys4 = tf(num4, den4);
sys5 = sys1*sys2*sys3*sys4
Transfer Function:
0.01334 s^2 + 0.1833 s + 5.135
--------------------------------------------------------------------------------------
1.345e-11 s^6 + 1.331e-08 s^5 + 4.028e-06 s^4 + 0.000378 s^3 + 0.005878 s^2 + 0.1232 s
В результате решения будет получена искомая передаточная функция разомкнутого КС с численными значениями коэффициентов полиномов числителя и знаменателя b2, b1, b0, d6, d5, d4, d3, d2, d1, d0 = 0
 (2.1)
(2.1)Далее переходим к построению ЛЧХ:
w = logspace(-3, 3);
num = [0.01334 0.1833 5.135];
den = [1.345e-11 1.331e-08 4.028e-06 0.000378 0.005878 0.1232 0];
bode(num, den, w)
Результаты моделирования представлены на рис. 2.5.
Значения (– n, m) являются показателями степени при основании 10, указывающие диапазон частот. Обычно ограничиваются диапазоном – 3, 3. В этом случае частота будет изменяться в пределах
Из анализа графиков видно, что запасы устойчивости по фазе и амплитуде составляют Lз = 16,2 дБ (Gain Margin) и
Запас устойчивости по амплитуде Lз определяется как разность между линией 0 дБ и значением логарифмической амплитудно-частотной характеристики (ЛАЧХ) на частоте, соответствующей точке пересечения графика фазовой частотной характеристики со значением – 180°.
Запас устойчивости по фазе
Значение фазы
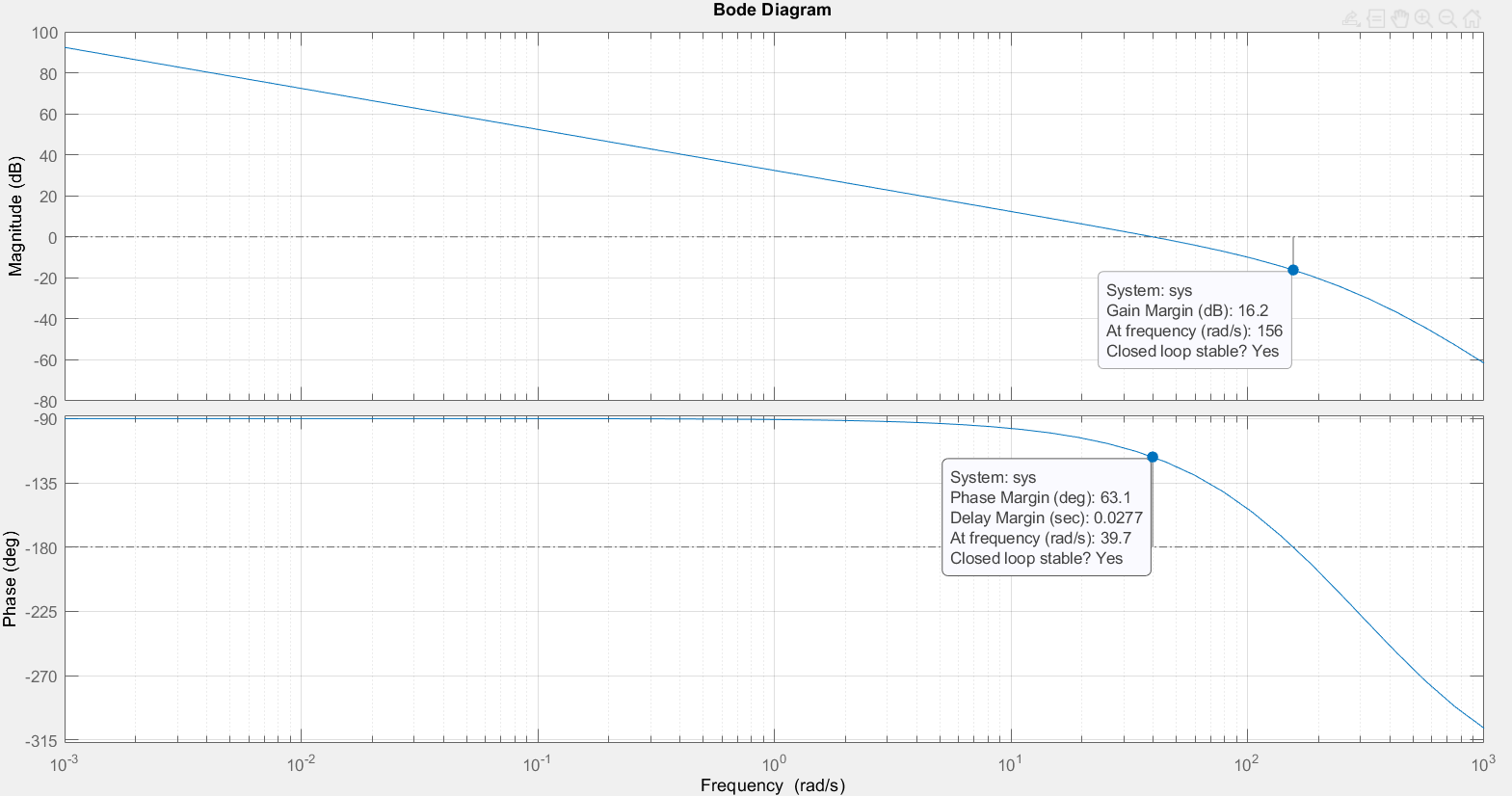
Рис. 2.5. Логарифмические частотные характеристики контура скорости
Результаты моделирования подтверждают правильность расчёта параметров РС и позволяют сделать вывод о том, что КС настроен на ОМ.
3. ПРОГРАММНАЯ РЕАЛИЗАЦИЯ ЦИФРОВОГО РЕГУЛЯТОРА СКОРОСТИ И МОДЕЛИРОВАНИЕ КОНТУРА СКОРОСТИ
3.1. Программная реализация регулятора скорости и моделирование контура скорости
Начальные данные:
-период квантования Т0 = 0,001 с.
Преобразуем передаточную функцию регулятора скорости
 ,
,к виду
 .
.Параметр
-
С помощью формулы трапеций определим
Тогда
 . (3.1)
. (3.1)Заметим, что переход к z-преобразованию с применением MatLab предусматривает деление на коэффициент при старшей степени z в знаменателе. В нашем случае коэффициент при z2
Тогда в выражении (3.1)
 ;
;  ;
; ;
;  ;
;  .
.Здесь
-
Составляем структурную схему программирования.
По уравнениям состояния и выхода определяем коэффициенты матриц А, B, C, D соответственно
 ;
;  ;
;  .
.3.2. Реализация ССДМ КС с цифровым регулятором скорости и получение переходных характеристик по управляющему и возмущающему воздействиям.