Файл: Расчет системы регулирования скорости электропривода.docx
ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 22.11.2023
Просмотров: 92
Скачиваний: 6
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
Министерство науки и высшего образования Российской Федерации Федеральное государственное автономное образовательное учреждение высшего образования «Уральский федеральный университет имени первого Президента России Ельцина Б.Н.» (УрФУ) Институт Уральский энергетический Кафедра Электропривод и автоматизация промышленных установок
Оценка
Руководитель проекта по модулю
Ишматов З.Ш.
Члены комиссии
Дата защиты
ПОЯСНИТЕЛЬНАЯ ЗАПИСКА к курсовому проекту по дисциплине «Управление в технических системах» по теме: Расчет системы регулирования скорости электропривода Вариант №…
Студент:
(ФИО) (Подпись)
Группа:
Екатеринбург

ЗАДАНИЕ
на проект по модулю
Студент группа специальность/направление подготовки 13.03.02 Электроэнергетика и электротехника
1. Тема проекта по модулю Расчет системы регулирования скорости электропривода
2. Содержание проекта, в том числе состав графических работ и расчетов
3. Дополнительные сведения
4. План выполнения проекта по модулю Наименование элементов проектной работы
Сроки Примечания Отметка о
выполнении
Руководитель / З.Ш.Ишматов/
Министерство науки и высшего образования Российской Федерации
ФГАОУ ВО «Уральский федеральный университет
имени первого Президента России Б.Н.Ельцина»
РЕЦЕНЗИЯ
на проект по модулю
Студента группы Тема курсовой работы (проекта): Расчет системы регулирования скорости электропривода
Модуль/дисциплина Управление в технических системах 1. Соответствие результатов выполнения работы целям и задачам курсового проектирования результатам обучения по дисциплине/модулю
соответствуют
2. Оригинальность и самостоятельность выполнения работы Работа учебная
3. Полнота и глубина проработки разделов Достаточно полно
4. Общая грамотность и качество оформления текстового документа и графических материалов хорошие
5. Вопросы и замечания нет
6. Общая оценка работы
Сведения о рецензенте: Ф.И.О. Ишматов З.Ш. Должность доцент Место работы УрФУ Уч. звание доцентУч. степень к.т.н. Подпись
СОДЕРЖАНИЕ
Введение, постановка задачи
1. Синтез последовательного корректирующего устройства – регулятора
скорости 5 1.1. Построение частотных характеристик неизменяемой части системы 5 1.2. Построение желаемой частотной характеристики разомкнутой системы 8 1.3. Синтез корректирующего устройства 10 1.4. Анализ качества по реакции на ступенчатое управляющее воздействие 11
2. Исследование устойчивости и качества системы 12 2.1. Определение запасов устойчивости 12 2.2. Построение реакции системы на возмущающее воздействие – ступенчатое
изменение 13 2.3. Построение реакции системы на линейно нарастающее управляющее воздействие 15
3. Исследование точности системы 16 3.1. Вычисление коэффициентов ошибок и систематических ошибок 16 3.2. Оценка степени влияния помех
17 3.3. Оценка ошибок системы моделированием 19
4. Конструктивные расчеты регулятора скорости 24 4.1. Определение параметров непрерывного регулятора скорости 24 4.2. Расчет алгоритма работы цифрового регулятора скорости 25 4.3. Анализ качества системы с цифровым регулятором скорости при ступенчатом
изменении управляющего воздействия 26
5. Заключение 29
Библиографический список 30
Введение, постановка задачи
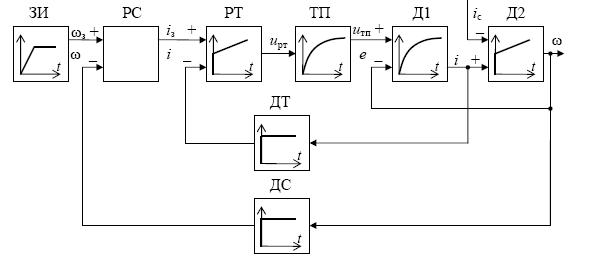
В работе предполагается провести исследование автоматизированного электропривода постоянного тока, функциональная схема которого представлена на рис. 1.
Рис 1 Функциональная схема электропривода
Схема включает два контура регулирования: внутренний – контур регулирования тока и внешний – контур регулирования скорости. В контур регулирования тока входят регулятор тока (РТ), тиристорный преобразователь (ТП), звено, учитывающее электромагнитную инерцию двигателя постоянного тока (Д
1), и датчик тока (ДТ). Регулирование тока в контуре осуществляется регулятором тока РТ, который получает информацию о задачах управления iЗ от регулятора скорости РС и информацию о результатах управления от датчика тока ДТ. Регулирование тока осуществляется в
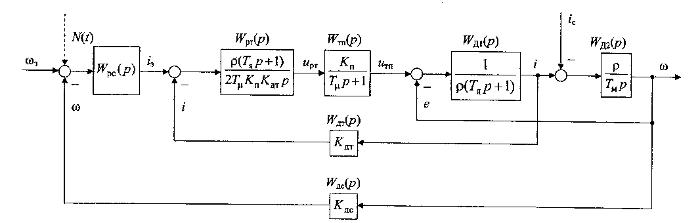
На основании функциональной схемы электропривода составляется структурная схема системы рис. 2, которая является основной исходной расчетной схемой.
Рис 2 Структурная схема электропривода
Передаточная функция элементов системы:
pКKT
ppT
pW
ДТП
Я
PT
+
=
2
)1(
)( – регулятор тока;
1
)(
+
=
pT
К
pWПTП
– тиристорный преобразователь;
)1(
1
)(1
+
=
pTp
pW
Я
Д – звено, учитывающее электромагнитную инерцию
ДПТ;
pT
p
pWД
=
)(2– звено, учитывающее механическую инерцию ДПТ;
ДТДTKpW=)( – датчик тока,
где Тя= 0,04 с – электромагнитная постоянная времени электропривода;
Тм= 0,189 с – электромеханическая постоянная времени электропривода;
Тμ= 0,01 с – постоянная времени фильтра на входе преобразователя;
ρ = 0,136 – сопротивления якорной цепи;
Кдт= 0,5 – коэффициент датчика тока;
Кп = 2,8– коэффициент преобразователя;
Кдс = 1 – коэффициент датчика скорости;
Т = 0,02 с – период дискретности цифрового регулятора скорости.
мкФ0,1С = - емкость конденсатора аналогового регулятора скорости;
Проектируемая система должна обеспечить следующие показатели качества
переходного процесса при )(1)( ttЗ= :
1) перерегулирование σ ≤ (30– 50) %;
2) время достижения максимума tm = (0,15 – 0,2) с;
3) время переходного процесса t
П = (0,3 – 0,4) с.
Требуемый порядок астатизма – второй. 1 Синтез последовательного корректирующего устройства –
регулятора скорости
1.1 Определение передаточной функции неизменяемой части
З
)(pWPC Зi
i )(pWPT)(pWTП)(2pWД)(1pWД
)(pWДТ
)(pWДС
iuрт uтп
е
З
)(pWPC Зi
i )(pWPT)(pWTП)(2pWД)(1pWД
)(pWДС
iuрт uтп
е
)(pWДТ
)(2pWД
1
З
)(pWPC Зi
i
)(pWДС
)(pWДТ
)(2pWД
1
)(pWДВ
З
)(pWPC
Зi
)(pWДС
)(pWНЧ
Рис3 Преобразование структурной схемы САУ
Определяем передаточную функцию первого разомкнутого контура Wдд(p):
( ) ( )
рТрТТ
1
рТ
ρ
1)рρ(Т
1
рWрWWдд(p)
м
2
мямя
д2д1
+
=
+
==
Определяем передаточную функцию первого замкнутого контура p)(Gд:
( )
( )
( ) 1рТрТТ
1
рТрТТ
1
1
рТрТТ
1
рW1
рW
рG
м
2
мя
м
2
мя
м
2
мя
д
д д
++
=
+
+
+
=
+
=
Определяем передаточную функцию второго разомкнутого контура )(Wдвp:
( ) ( ) ( ) ( ) я пдв рт тп д 2
μ п дт μ я м м
ρ(Т р 1) К 1 W W р W р G р
2Т К К р Т р 1 Т Т р Т р 1
р
+
= =
+ + +
=
рК2ТрКТ2ТрКТТ2ТрК2ТрКТ2ТрКТТ2Т
1)рρ(Т
дтμ
2
дтмμ
3
дтмяμ
2
дт
2
μ
3
дтм
2
μ
4
дт
2
μмя
я
+++++
+
=
рК2Т)КТ2ТК(2Тр)КТТ2ТКТ(2ТррКТТ2Т
1)рρ(Т
дтμдтмμдт
2
μ
2
дтмяμдтм
2
μ
34
дт
2
μмя
я
+++++
+
Определяем передаточную функцию в ОС второго контура )(W
'
дтp:
( ) ( ) ( )
ρ
рТК
WрWрW
мдт
д2.осдт ' дт== р
Определяем передаточную функцию неизменяемой части системы )(Wнчp:
( )
( )
( ) ( )
=
+
=
рWрW1
рW
рW
'
дтдв
дв
нч
=
+++++
+ +
+++++
+
=
ρ
рТК
рК2Т)КТ2ТК(2Тр)КТТ2ТКТ(2ТррКТТ2Т
1)рρ(Т
1
рК2Т)КТ2ТК(2Тр)КТТ2ТКТ(2ТррКТТ2Т
1)рρ(Т
мдт
дтμдтмμдт
2
μ
2
дтмяμдтм
2
μ
34
дт
2
μмя
я
дтμдтмμдт
2
μ
2
дтмяμдтм
2
μ
34
дт
2
μмя
я
=
+++++++
+ =
рКТрКТТрК2Т)КТ2ТК(2Тр)КТТ2ТКТ(2ТррКТТ2Т
1)рρ(Т
дтм
2
дтмядтμдтмμдт
2
μ
2
дтмяμдтм
2
μ
34
дт
2
μмя
я
)КТКр(2Т)КТТКТ2ТК(2Тр)КТТ2ТКТ(2ТррКТТ2Т
1)рρ(Т
дтмдтμдтмядтмμдт
2
μ
2
дтмяμдтм