Файл: Расчет системы регулирования скорости электропривода.docx
ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 22.11.2023
Просмотров: 93
Скачиваний: 6
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
2
μ
34
дт
2
μмя
я
+++++++
+ =
Осуществляем подстановку значений в передаточную функцию неизменяемой части
(р)Wнч:
р1045,0р1077.5р1045.9р107.56
)104,0(136,0
)(
233547-+++
+
=
−−
p
pWнч
Определим полюсы передаточной функции неизменяемой части ( ):pWнч
????1= 0; ????2= −28.185; ????3= −48.407 − 50.596????; ????4= −48.407 + 50.596????;
Разобьем передаточную функцию на отдельные звенья:
102,010039.2
1
1035,0
1)104,0(302,1
)(
24++
+
+
=
−
pppp
p
pWнч
Здесь )(pWрс - передаточная функция корректирующего устройства (регулятора),
(p)Wнч - передаточная функция неизменяемой части, включающая звенья, входящие в
w wз Wнч(p) Wрс(p)
Рис. 4. Структурная расчетная схема САУ замкнутый контур тока, т.е. (p)Wрт, (p)Wтп, (p)Wд1, (p)Wдт, и звено объекта управления
(p).Wд2
1.2 Построение частотных характеристик объекта регулирования (неизменяемой
части системы):
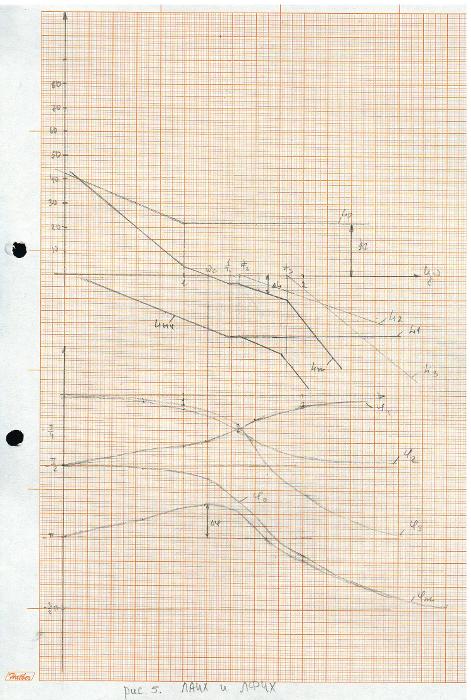
Передаточная функция неизменяемой части представлена в виде произведения передаточных функций типовых звеньев: изодромного, апериодического и колебательного звена. Построив ЛАЧХ каждого звена и просуммировав их, мы получим ЛАЧХ неизменяемой части.
p
p)104,0(302,1
(p)W1
+
= -изодромное звено: k1=1.302; Т1=0,04 с; 1ω =25 рад/с;
1035,0
1
(p)W2
+
=
p
- апериодическое звено: k2=1; Т2=0,035 с; 2ω =28,571 рад/с;
1714,0014,02014,0
1
(p)W
223++
=
pp
- колебательное звено k3=1; Т3=0,014 с; 3ω
=71.43 рад/с; ξ =0,714;
Все построения частотных характеристик выполнены в диапазоне от 1 до 1000 с-1.
Для построения характеристик были выбраны следующие масштабы: по частоте – 1
декада на 100 мм; по усилению – 10 дБ на 10 мм; по фазе – 900 на 30 мм.
Для построения фазовых характеристик выбираем частоты ω в диапазоне
111000с1с −− :
−=
ω0,04
1
arctg) (ω1 - ЛФЧХ изодромного звена;
( )ω0,035arctg) (ω2−= - ЛФЧХ апериодического звена;
−=
231ω)(0,014-1
ω0,02
arctg) (ω - ЛФЧХ колебательного звена при ω<1/Т;
−−=
232ω)(0,014-1
ω0,02
arctgπ) (ω - ЛФЧХ колебательного звена при ω>1/Т
3210 ++= - ЛФЧХ неизменяемойчасти( объекта)
−=
ω0,1
1
arctg) (ωр - ЛФЧХ регулятора скорости;
р0ж1 += - ЛФЧХ желаемой части Таблица 1 - Расчет ЛФЧХ
ω , с-1 ) (ω1 , 0 ) (ω2 , 0 ) (ω3 , 0 ) (ω0 , 0 ) (ωр ,
0 ) (ωж ,
0
1 1,00 -87,75 -2,01 -1,15 -90,91 -84,33 -175,24
2 5,00 -78,73 -9,93 -5,74 -94,40 -63,47 -157,87
3 10,00 -68,23 -19,30 -11,54 -99,07 -45,02 -144,09
4 15,70 -57,90 -28,80 -18,32 -105,02 -32,51 -137,53
5 30,00 -39,83 -46,42 -37,60 -123,85 -18,44 -142,29
6 50,00 -26,58 -60,29 -88,26 -175,12 -11,32 -186,44
7 71,40 -19,31 -68,23 -90,00 -177,53 -7,98 -185,51
8 100,00 -14,04 -74,09 -113,90 -202,03 -5,71 -207,75
9 150,00 -9,47 -79,26 -159,00 -247,73 -3,82 -251,54
10 270,00 -5,29 -84,00 -174,01 -263,31 -2,12 -265,43
11 500,00 -2,86 -86,77 -178,24 -267,88 -1,15 -269,03
12 1000,00 -1,43 -88,41 -179,55 -269,39 -0,57 -269,97
ЛАЧХ и ЛФЧХ объекта регулирования представлены на рис. 5.
1.3 Построение желаемой частотной характеристики разомкнутой системы и синтез корректирующего устройства:
Среднечастотная часть характеристики с наклоном -20 дБ/дек имеет частотный
диапазон в пределах íω <ω< вω и составляет около одной декады. Данный диапазон
включает частоту среза сω и определяет показатели качества замкнутой системы.
Частота среза желаемой ЛАЧХ разомкнутой системы определяется по формуле:
1
m
сс7,51
0,2
3,14
t
π ω −===
Граница первой низкочастотной области вычисляется по заданным показателям качества и имеет вид:
1
mп
1нс10
0,20,4
2
tt
2 ω −=
−
=
−
=
Низкочастотная часть желаемой ЛАЧХ обуславливает точность воспроизведения управляющего воздействия. Форма характеристики в этом диапазоне
( )11н10сω;0ω −= зависит от требуемого порядка астатизма.
Высокочастотная часть характеристики с наклоном -60 дБ/дек находится в пределах
( )= −;0,100 11св и не оказывает существенного влияния на показатели качества
системы, поэтому формы желаемой характеристики и ЛАЧХ неизменяемой части совпадают.
ЛАЧХ последовательного корректирующего устройства находится как разность желаемой ЛАЧХ и ЛАЧХ неизменной части, затем определяем передаточную функцию
регулятора )(pWрс. Желаемая ЛАЧХ и ЛФЧХ разомкнутой системы представлены на
Передаточная функция регулятора скорости имеет вид: p
10,1p 89,125 p 1pT K(p)W рс рсрс + = + = ,где с1,0
10
1
ω
1
T
1н
рс=== .
22TlgK20 рсрс= => 89,125 0.1 10
T 10 K 20 22
рс 20 22
рс===
Передаточная функция желаемой ЛАЧХ имеет вид:
1714,0014,02014,0
1
1035,0
1)104,0(302,1
p
10,1p
89,125(p)W(p)W(p)W
22НЧРСЖ++
+
+
+
==
pppp
p
1.4 Анализ качества по реакции на ступенчатое управляющее воздействие:
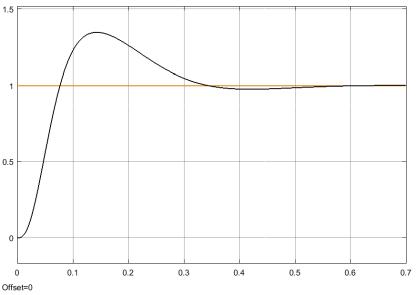
С помощью моделирующего комплекса Simulink оцениваем показатели качества
полученной системы при )(1)( ttз= и 0)( =tiс:
1) перерегулирование( )%50;30%8,34σ = ,
2) время достижения максимума( ) с0,2;0,15с0,146t m= ,
3) время переходного процесса( ) с0,4;0,30,3сt п= .
Спроектированная система обеспечивает заданные показатели качества переходного процесса, изображенного на рис. 7.
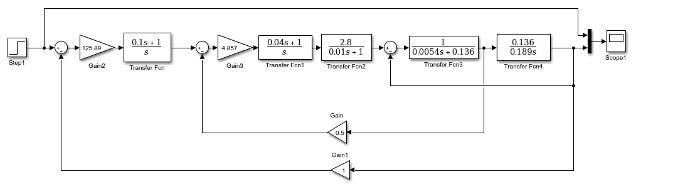
Рис. 7. Реакция системы регулирования скорости ω(t) при 1(t)ωç= и 0N(t)0,(t)iñ==
Рис. 6. Реакция системы регулирования скорости ω(t) при 1(t)ωç= и 0N(t)0,(t)iñ==
2. Исследование устойчивости и качества системы
2.1 Определение запасов устойчивости:
Оцениваем устойчивость системы по желаемым ЛАЧХ и ЛФЧХ:
дБ 613,2д3ΔL = -запас устойчивости по амплитуде,
0O305,43Δ = - запас устойчивости по фазе.
Запасы устойчивости удовлетворяют заданным показателям.
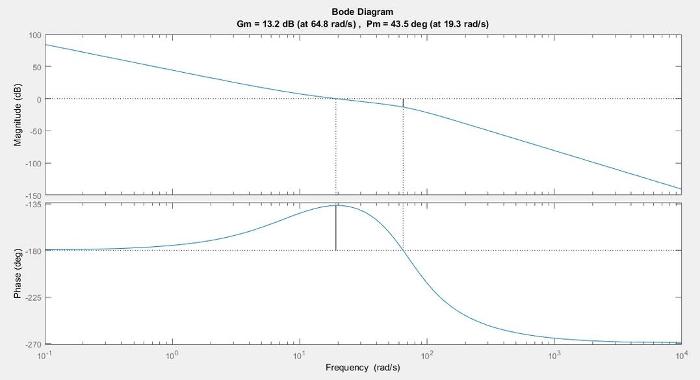
Рис. 8. Запас устойчивости по амплитуде и запас устойчивости по фазе 2.2 Построение реакции системыω(t) ,i(t) на возмущающее воздействие -
ступенчатое изменение1(t)(t)iс= :
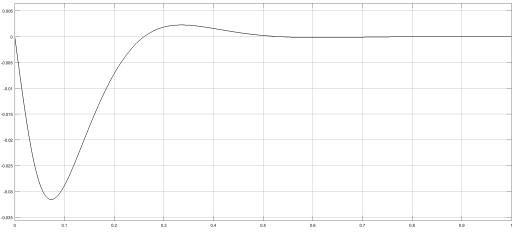
С помощью моделирующего комплекса ‘MatLab’ вычисляем реакцию замкнутой системы регулирования скорости ω(t) , i(t) при единичном возмущающем воздействии
1(t)(t)iс
= . Управляющее воздействие при этом полагается равным нулю 0(t)ωз= .
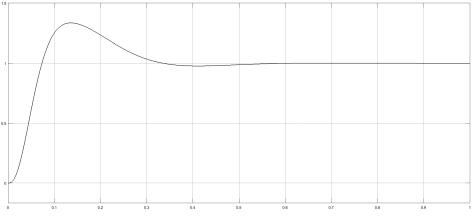
Рис. 9. Структурная схема САУ в Simulink при 1(t)(t)iс= и 0(t)ωз=
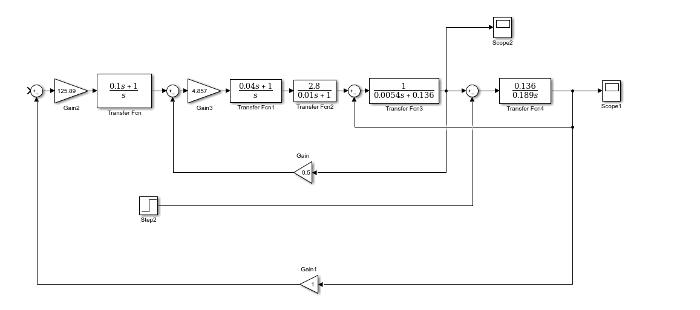
Рис. 10 Реакция тока i (t) , при 1(t)(t)iс= и 0N(t)0,(t)ωз== Рис. 11 Реакция скорости ω(t) , при 1(t)(t)iс= и 0N(t)0,(t)ωз==
воздействие:
С помощью моделирующего комплекса MatLab вычисляем реакцию замкнутой системы регулирования скорости ω(t) ,i(t) при трапецеидальном законе изменения
задающего воздействия (t)ωзс временами разгона, торможения и работы на
установившейся скорости по с1,5 и значением установившейся скорости, равном 1.
Возмущающее воздействие при этом полагается равным нулю 0(t)iс= . Его график
представлен на рис. 12.
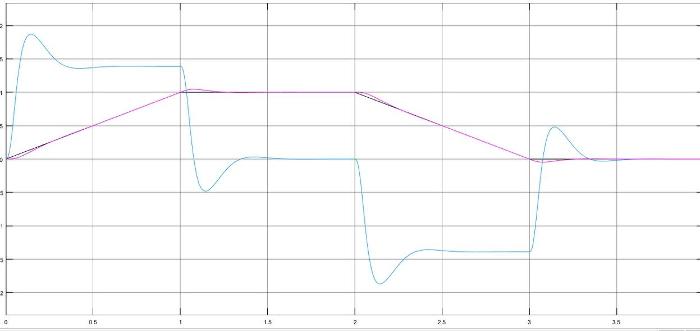
При разгоне и торможении возникают переходные процессы, которые очень быстро
затухают, а величина установившейся ошибки принимает значение 0ε уст= . Поскольку
трапецеидальное воздействие было реализовано при помощи линейных элементов, система отрабатывает ее без ошибки, а это свидетельствует о втором или большем порядке астатизма. Полученный результат удовлетворяет требуемому условию.
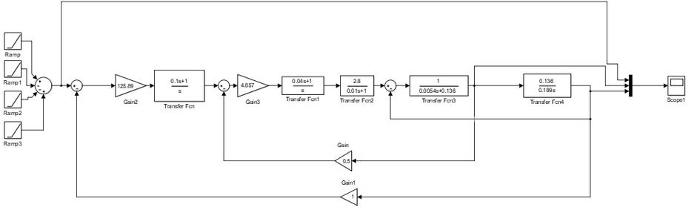
Рис. 12. Структурная схема САУ в Simulink при трапецеидальном воздействии и
0N(t)0,(t)iс==
Рис. 13. Реакция системы регулирования скорости ω(t) и тока i(t) при трапецеидальном
воздействии и 0N(t)0,(t)iс==
3. Исследование точности системы
3.1 Вычисление коэффициентов ошибок и систематических ошибок:
1714,0014,02014,0
1
1035,0
1)104,0(302,1
p
10,1p
89,125(p)W(p)W(p)W
22НЧРСЖ++
+
+
+
==
pppp
p
=
+++
++
==
−− 234557
2
1045,000577,01045,91056,7