ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 30.11.2023
Просмотров: 90
Скачиваний: 2
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
-
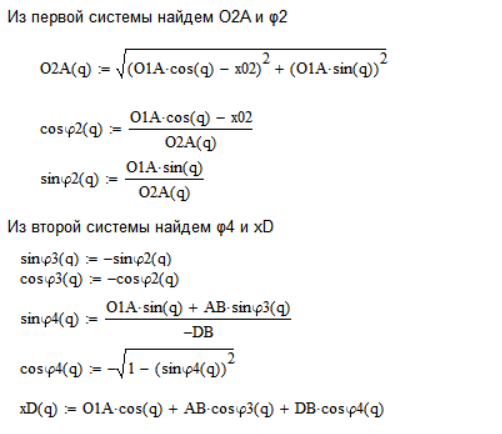
Исследование функции положения прототипа 2
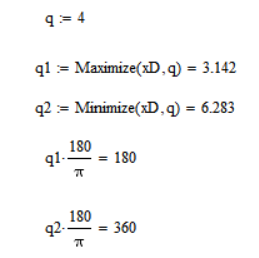
По графику изменения координаты выходного звена найдём крайнее положение при помощи встроенных функций MathCAD (нижний правый график на рисунке 1.6.3.1).
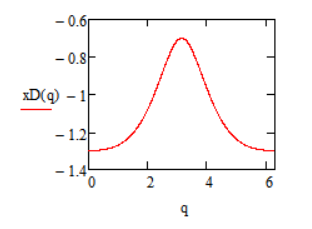
Рис.1.6.4.1. График изменения координаты точки D.
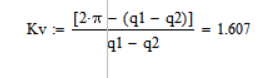
Значение Kv по заданию 1.6, H по заданию 0,08, следовательно, удалось добиться желаемого результата.
-
Расчёт критериев синтеза-
K1
-
Найдём максимальное по модулю значение скорости выходного звена и рассчитаем критерий K1.
-
K2
Найдём максимальное по модулю значение косинуса угла 4-ого звена и рассчитаем критерий K2.
-
Крайние положение прототипа 2
Крайние положения механизма изображены на рисунке 1.6.6.1.
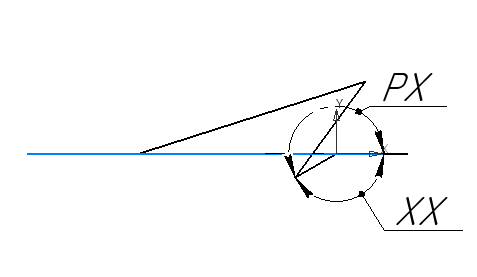
Рисунок 1.6.6.1 – Крайние положение прототипа 2
-
Таблица сравнения. Выбор лучшего прототипа.
Таблица 1 - Таблица сравнения прототипов
| | Kv | H | K1 | K2 | Габариты (мм) |
| Прототип 1 | 1.6 | 0.08 | 1,139 | 1.208 | 378х218 |
| Прототип 2 | 1.607 | 0.08 | 2,45 | 1,786 | 218х273 |
Из таблицы видно, что очевидного выбора нет (необходимо выбрать прототип с меньшими K1,K2, габаритами). Так что необходимо установить приоритетный параметр: наиболее важным параметром я выбрала K1, так как этот коэффициент отражает соотношение между силами на входе и на выходе: сила, прикладываемая к выходному звену в зубодолбежном станке, очень велика, а потому важно не допустить возрастания момента на кривошипе, так как он и так велик. Учитывая это, я выбрала для дальнейшего рассмотрения прототип 1.
-
План двенадцати положений выбранного механизма
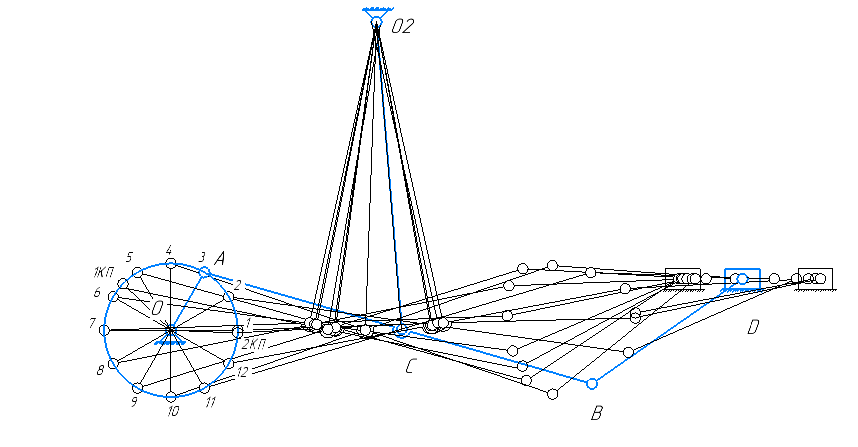
Рисунок 1.8.1 – 12 положений механизма
-
Графоаналитическое исследование кинематики выбранного прототипа-
Построение плана скоростей и ускорений положения 60°
-
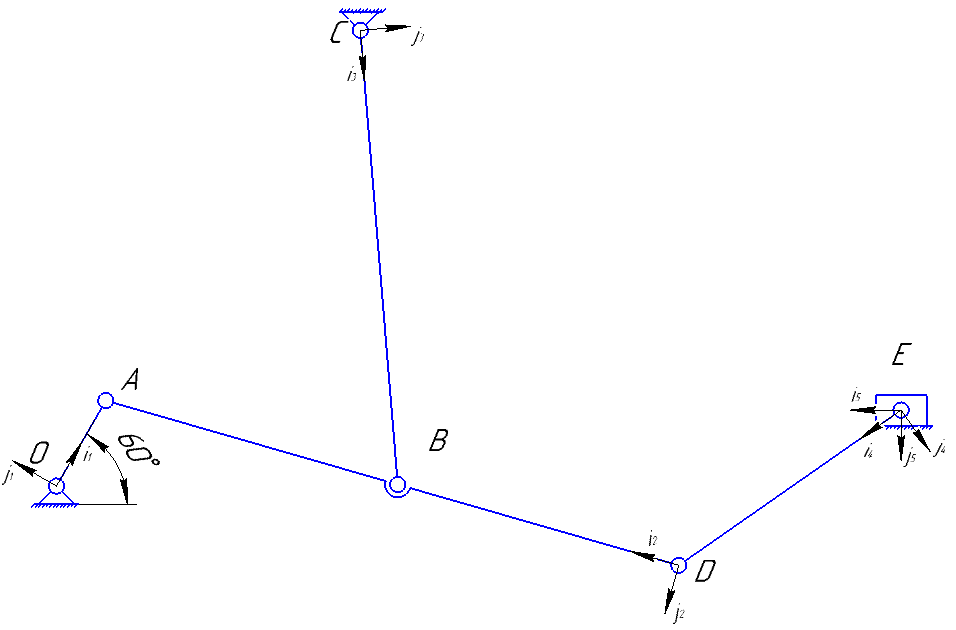
Рисунок 1.9.1.1 – Схема механизма в положении 60°
План скоростей представлен на рисунке 1.9.1.2.
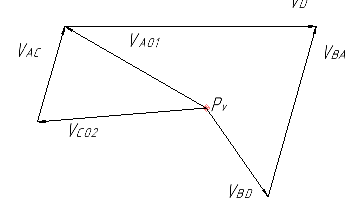
Рисунок 1.9.1.2 – План скоростей
План ускорений представлен на рисунке 1.9.1.3.
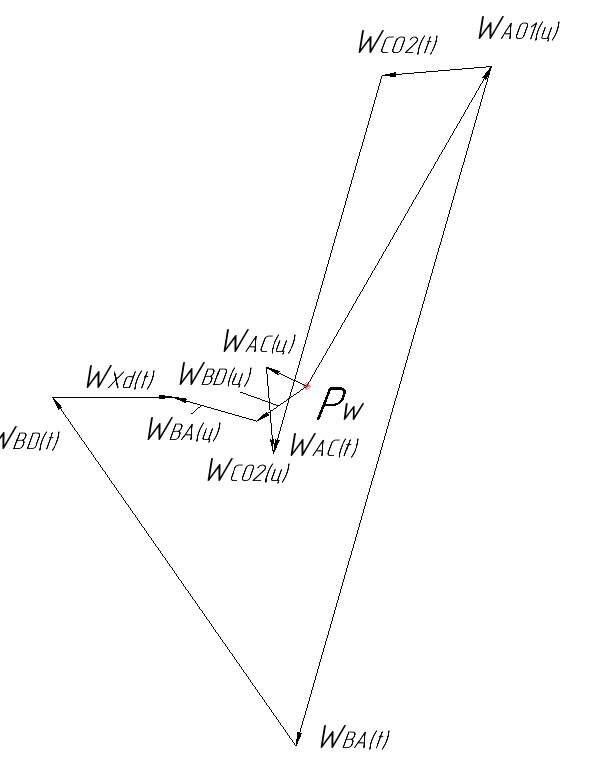
Рисунок 1.9.1.3 – План ускорений
Рассчитаем скорости и ускорения графически с помощью MathCAD и КОМПАС:

-
Расчёт скоростей и ускорений аналитически
положения 60°








-
Сравнение результатов расчётов для положения 60°
Таблица 2 – Сравнение результатов двух методов расчёта положения 60°
| Координаты и углы | Аналитически | Графически |
| Скорости | ||
| ω2 | -5.183 с-1 | -5.184 с-1 |
| ω3 | -5.886 с-1 | -5.887 с-1 |
| ω4 | 6.328 с-1 | 6.424 с-1 |
| Xe | -1.5677 м/с | -1.567 см/с |
| Ускорения | ||
| ε2 | 237.094 с-2 | -241.217 с-2 |
| ε3 | -44.08 с-2 | -44.319 с-2 |
| ε4 | -294.332 с-2 | -297.256 с-2 |
| We | 8.686 м/c2 |
|
Силовой анализ механизма. Снижение внешней виброактивности механизма.
-
Определение исходных данных для силового расчёта
Погонная масса: µ = 50 кг/м
Ускорение свободного падения: 10 м/с2
Угловая скорость вращения кривошипа:
 м/с
м/сМассы звеньев (кг):
Силы тяжести рассчитываются по формуле:

Определим координаты центров масс. Для этого запишем уравнения координат точек А, B, D:
Далее определим координаты центров масс по следующим формулам:

Определение сил инерции (Н):
Определение моментов инерции (кг*м2):

Определение моментов сил инерции (Н*м2):

-
Определение зависимости силы сопротивления от обобщенной координаты
По индикаторной диаграмме, представленной на рисунке 1.2.1, определяется зависимость рабочей нагрузки от входной координаты q.
Результаты вычислений представлены на рисунках ниже:
Задание функции положения выходного звена:
Задание функции величины рабочей нагрузки в зависимости от функции положения:
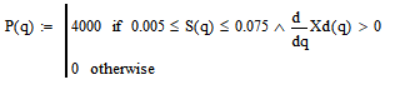
График функции рабочей нагрузки, совмещённый с графиков скорости выходного звена, представлен на рисунке 2.2.1.
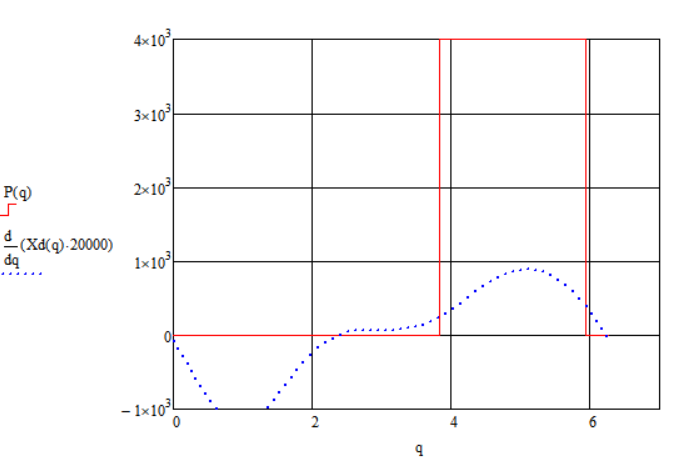
Рисунок 2.2.1 – График функций рабочей нагрузки и скорости выходного звена
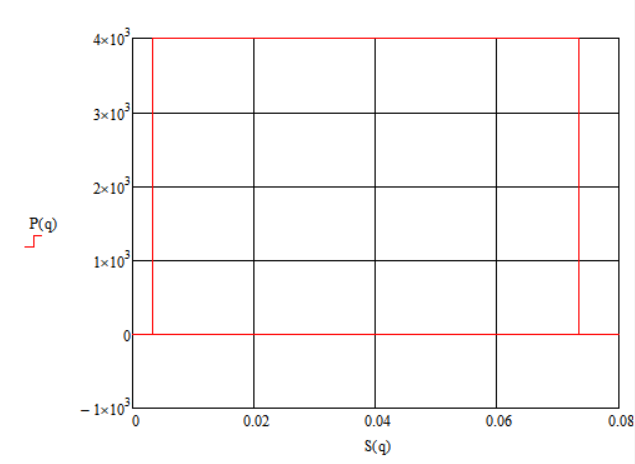
Рисунок 2.2.2 – График зависимости рабочей нагрузки от функции положения выходного звена (индикаторная диаграмма)
-
Кинетостатический расчёт-
Составление и решение уравнений кинетостатики
-
На схеме механизма, показанной на рисунке 2.3.1.1, изобразим все силы инерции, силы тяжести и моменты сил инерции для всех звеньев механизма.
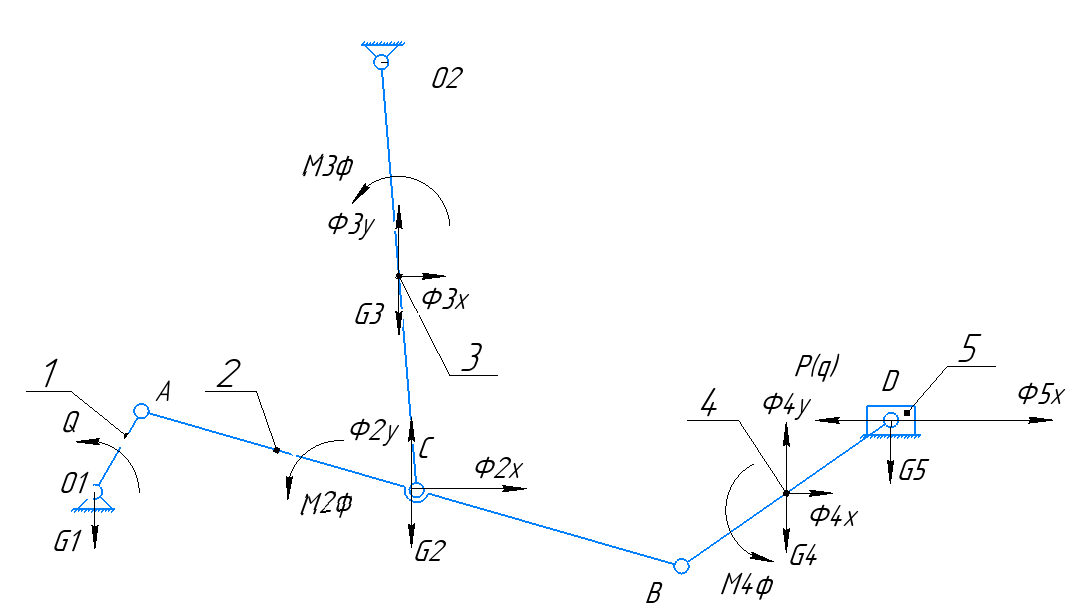
Рисунок 2.3.1.1 – Схема механизма для кинетостатического расчёта
Рассмотрим отдельно структурные группы механизма. Отрываем структурную группу от механизма и в местах отрыва действие других звеньев заменяем реакциями опор.
Звенья 5 и 4:
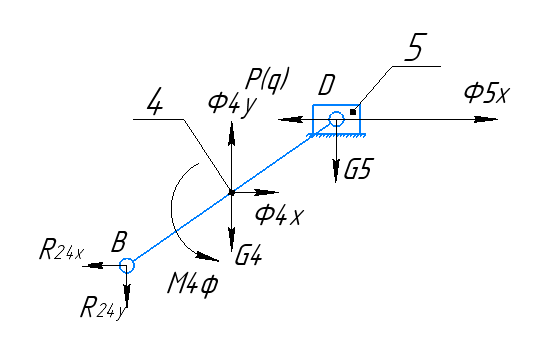
Рисунок 2.3.1.2 – Звенья 4, 5
Запишем уравнения равновесия для плоской системы:

Из выше представленных уравнений выразим неизвестные реакции:

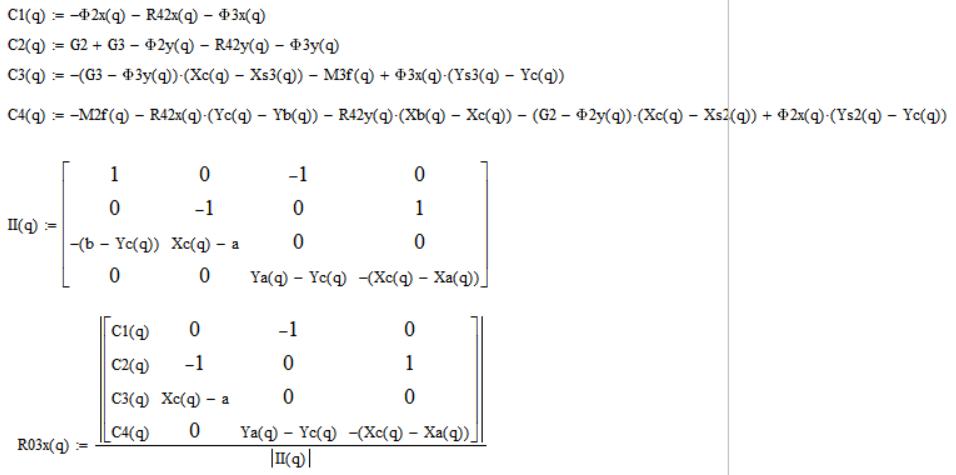
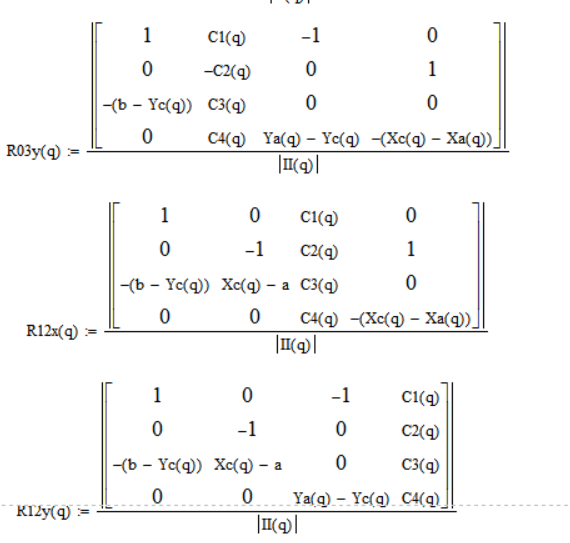
Звенья 3 и 2:
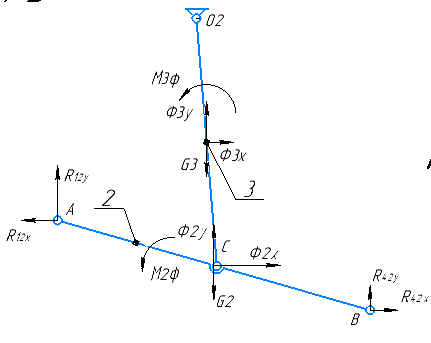
Рисунок 2.3.1.3 – Звенья 2, 3
Определим реакции для звеньев 3 и 2. Для этого запишем уравнения равновесия для плоской системы:

Учтём:
Из выше представленных уравнений выразим неизвестные реакции методом Крамера:
Звено 1:
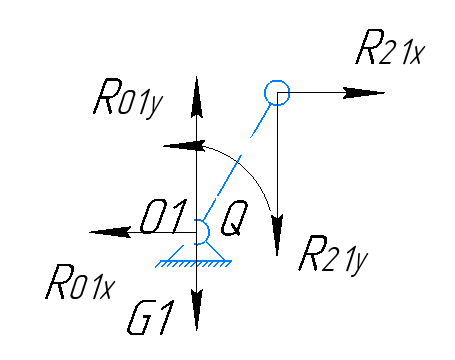
Рисунок 2.3.1.4 – Звено 1
Определим реакции для звена 1. Для этого запишем уравнения равновесия для плоской системы:
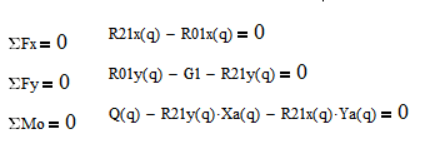
Учтём:
Из выше представленных уравнений выразим неизвестные реакции:
-
Нахождение движущего момента из общего уравнения динамики
Для механизма работа активных сил равна:

Найдём движущий момент:



Для проверки кинетостатического анализа наложим графики зависимостей, полученных из общего уравнения динамики и из кинетостатического расчёта, движущего момента от входной координаты (рисунок 2.3.2.1).