ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 30.11.2023
Просмотров: 86
Скачиваний: 2
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
Коэффициент при синусе в разложении приведённого момента инерции:
Выражение разложения приведённого момента инерции в ряд Фурье с точностью до 5 гармоник:
Переменные части приведённых моментов инерции:
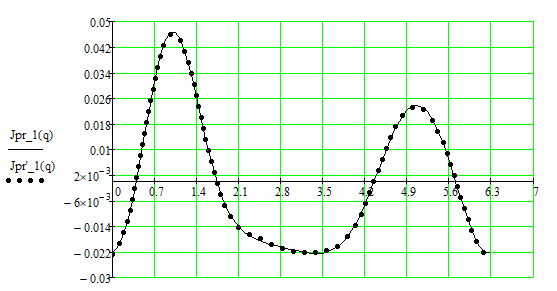
Рисунок 4.3.1.1 – Совмещённый график переменных частей приведённого момента инерции и его разложения в ряд Фурье
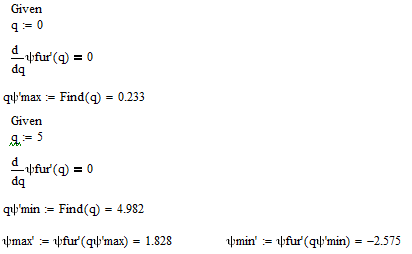
Определим первую производную по обобщённой координате приведённого момента инерции по следующей формуле:
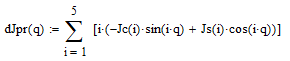
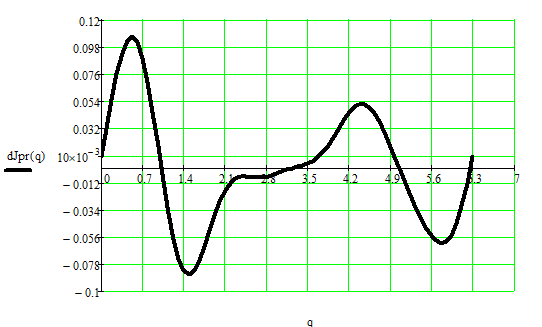
Рисунок 4.3.1.2 – График первой производной приведённого момента инерции по обобщённой координате
-
Приведённый момент сил сопротивления
Приведённый момент сил сопротивления определяется как коэффициент при вариации обобщённой координаты в выражении для возможной работы активных сил сопротивления (рабочей нагрузки и силы тяжести):
Определение коэффициентов разложения в ряд Фурье приведённого момента инерции:
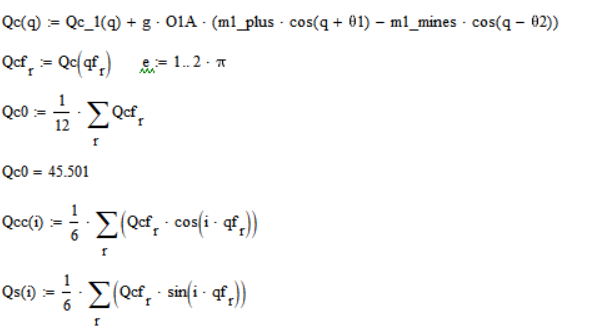
Выражение разложения в ряд Фурье приведённого момента сопротивления:

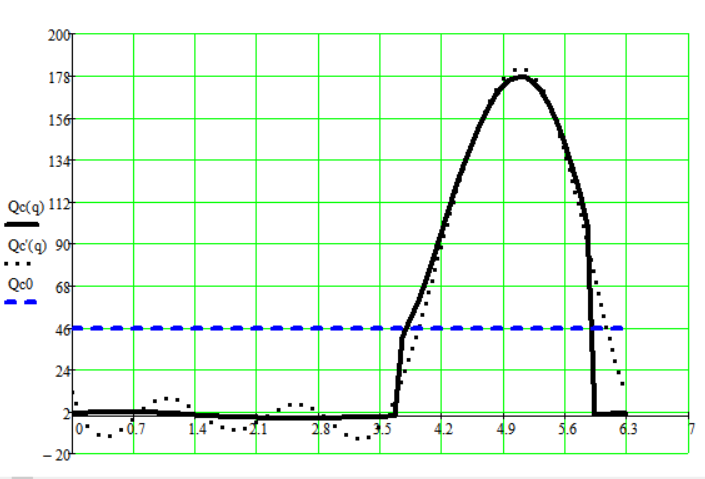
Рисунок 4.3.2.1 – Совмещённый график приведённого момента сопротивления, его разложения в ряд Фурье и его среднего значения
-
Приведенная статическая характеристика двигателя
Приведенная статическая характеристика двигателя определяется как обобщённая сила из уравнения:

откуда

где уравнения статической характеристики электродвигателя постоянного тока независимого возбуждения:
Тогда:
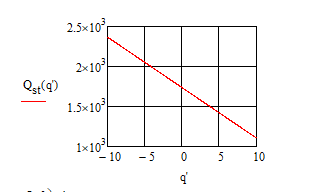
Рисунок 4.3.3.1 – График функции статической характеристики двигателя
-
Возмущающий момент
Возмущающий момент – характеристика внутренней виброактивности механизма.
Решения уравнений движения проводятся методом последовательных приближений. Вычисление угловой скорости кривошипа в нулевом приближении – средней скорости вращения выходного звена:
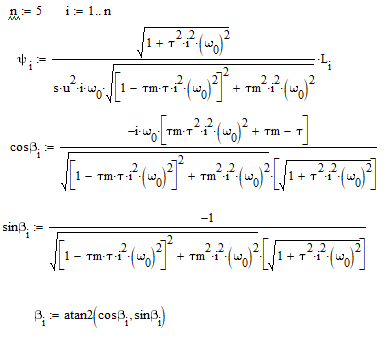
Для разложения функции возмущающего момента в ряд Фурье определим:
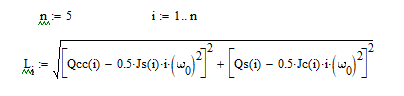
Определение начальных фаз гармоник ряда Фурье:

Разложение функции возмущающего момента в ряд Фурье:
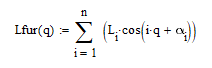
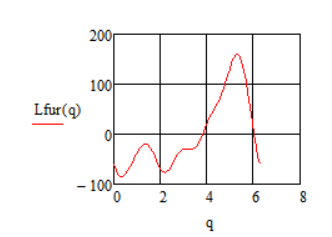
Рисунок 4.3.4.1 – График функции возмущающего момента, разложенного в ряд Фурье
-
Динамические ошибки
Вычисление механической постоянной времени машины, необходимой для вычисления динамических ошибок:
-
Динамическая ошибка по углу
Разложение функции динамической ошибки по углу в ряд Фурье:
Определение функции динамической ошибки по углу, разложенной в ряд Фурье:
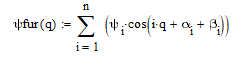
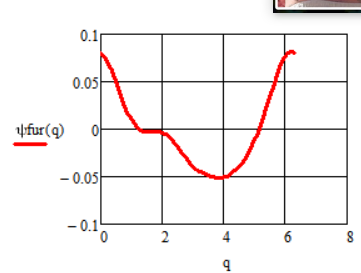
Рисунок 4.4.1.1 – График функции динамической ошибки по углу, разложенной в ряд Фурье
-
Динамическая ошибка по скорости
Разложение динамической ошибки по скорости в ряд Фурье:
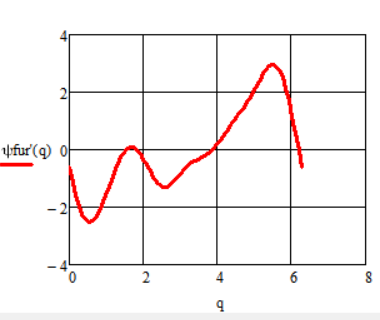
Рисунок 4.4.2.1 – График функции динамической ошибки по скорости, разложенной в ряд Фурье
-
Неравномерность вращения кривошипа
В технических требованиях к машине задаются допустимые значения динамических ошибок, оцениваемые коэффициентом неравномерности вращения кривошипа. В данном варианте допустимый коэффициент δ = 0,05. Вычислим максимальную и минимальную динамическую ошибку по скорости:
Коэффициент неравномерности вращения кривошипа:
Как видно из расчётов – полученный коэффициент неравномерности вращения кривошипа больше заданного. Машина нуждается в улучшении.
-
Движущий момент
Закон изменения движущего момента при учёте механической характеристики двигателя определяется по формуле:

где:
-
 — постоянная часть движущего момента;
— постоянная часть движущего момента; -
 — обобщённая координата в нулевом приближении;
— обобщённая координата в нулевом приближении; -
 — переменная часть движущего момента.
— переменная часть движущего момента.
-
Переменная часть движущего момента
Произведём разложение функции переменной части движущего момента в ряд Фурье. Определение коэффициентов:
Разложение функции переменной части движущего момента в ряд Фурье:
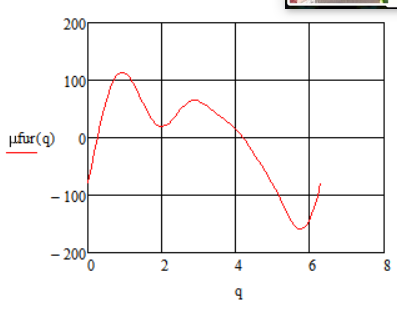
Рисунок4.6.1.1 – График функции переменной части движущего момента, разложенной в ряд Фурье
-
Закон изменения движущего момента
Вычисление постоянной части движущего момента:
Определение функции движущего момента:
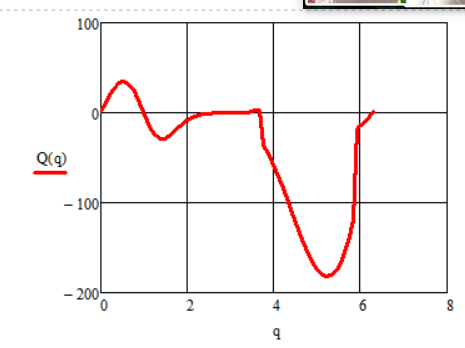
Рисунок 4.6.2.1 – График функции движущего момента
-
Движущий момент в приводе
Динамические нагрузки в передаточном механизме являются важной характеристикой установившегося движения. Их можно определить из следующего уравнения:

где:
-
 — момент инерции ротора двигателя и передаточного механизма, приведённый к входному звену;
— момент инерции ротора двигателя и передаточного механизма, приведённый к входному звену; -
 — момент силы в передаточном механизме.
— момент силы в передаточном механизме.
Тогда:

Поскольку:

то:

-
Определение движущего момента в приводе
Вычисление момента инерции ротора двигателя и передаточного механизма, приведённого к входному звену:
Механическая постоянная привода:
Вычисление начальных фаз гармоник ряда Фурье:
Определение функции движущего момента в приводе:

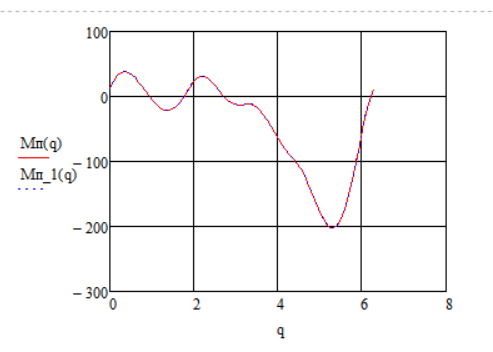
Рисунок 4.7.1.1 – График движущего момента в приводе
-
Условие знакопостоянства движущего момента в приводе
Основное требование конструирования привода – знакопостоянство движущего момента в приводе, обеспечивающее отсутствие перекладки зазоров в зубчатых передачах редуктора.
Как видно из графика на рисунке 4.7.1.1, условие нарушается, что ведёт к быстрому износу передач. Следовательно, машина нуждается в улучшении.
-
Улучшение показателей качества машины
Улучшить показатели машины можно при помощи установки маховика.
Установка маховика обеспечивает увеличение среднего значения приведённого момента инерции.
Зададим момент инерции маховика, установленного на роторе двигателя:
Тогда приведённый момент инерции будет вычислен, как:
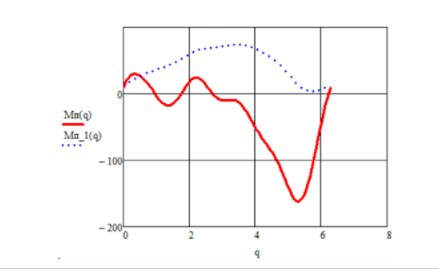
Рисунок 4.8.1 – Полученный график движущего момента в приводе
Как видно из графика, установленного маховика достаточно, чтобы обеспечить условие знакопостоянства движущего момента.
Вычислим коэффициент неравномерности вращения кривошипа:
Коэффициент неравномерности вращения всё ещё больше допускаемого значения 0,05. Также можно установить тормоз, но нам удалось добиться знакопостоянства движущего момента, а влияние тормоза на коэффициент неравномерности вращения либо сводится к нулю, либо (при достаточно увеличении усилия на тормозе) вовсе повышает данный коэффициент, что можно видеть в расчётах ниже.
Назначим момент на тормозе:

Коэффициент неравномерности вращения при этом:
Так же тормоз смещает график движущего момента вверх, что в некоторых случаях может быть полезно, но в нашем – не нужно, так как условие знакопостоянства уже выполняется. При этом тормоз уменьшает КПД машины.