ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 30.11.2023
Просмотров: 91
Скачиваний: 2
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
Рисунок 2.3.2.1 - Графики зависимостей Q=Q(q) и Q1=Q1(q)
Как видно из рисунка, графики зависимостей, вычисленных двумя методами, движущего момента от входной координаты совпали, поэтому можно говорить о правильности анализа механизма.
-
Устранение внешней виброактивности механизма-
Главный вектор сил инерции
-
Мера внешней виброактивности механизма — главный вектор сил инерции.
Определение проекций вектора, а также годограф данного вектора, представлены ниже.
Рисунок 2.4.1.1 – Годограф главного вектора сил инерции
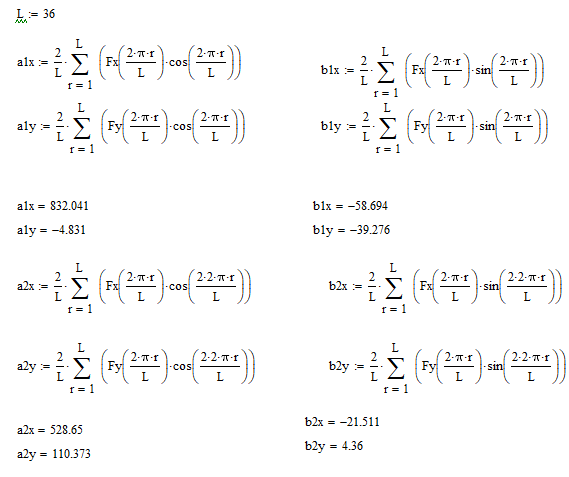
Разложим главный вектор сил инерции в ряд Фурье:
-
Эллиптические и круговые гармоники
Коэффициенты при первой гармонике имеют большие значения, поэтому нас интересуют только они:

Значения проекций главного вектора сил инерции, разложенные в ряд Фурье с точностью до 1 гармоники:
Эллиптические гармоники могут быть представлены в виде суммы двух круговых гармоник.
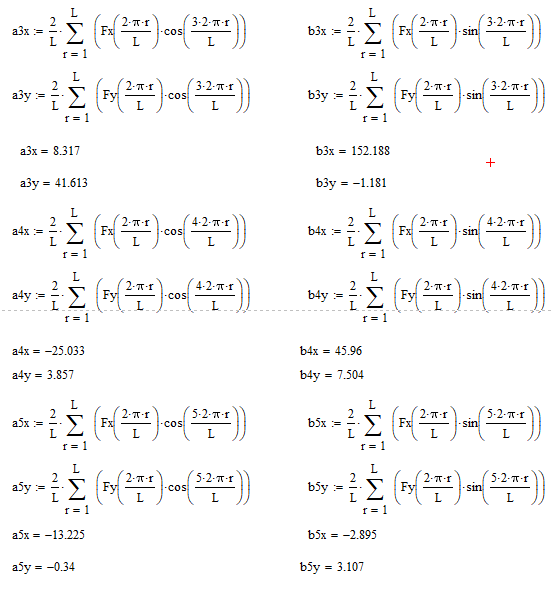
Вычислим значения коэффициентов круговых гармоник:
Проекции векторов круговых гармоник:
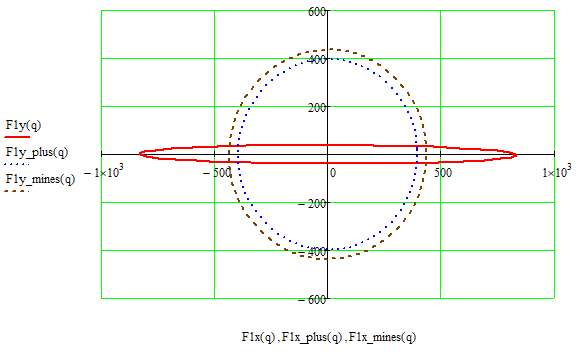
Рисунок 2.4.2.1 – Эллиптическая и круговые гармоники
Модули векторов круговых гармоник:
-
Установка противовесов
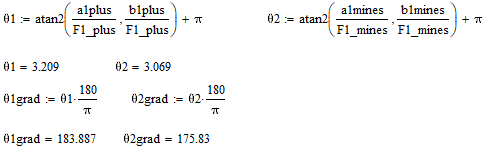
Вычисление начальных углов установки противовесов через синусы и косинусы начальных углов круговых гармоник:
Вычислим массы противовесов:
Схема установки противовесов представлена на рисунке 2.4.3.1.
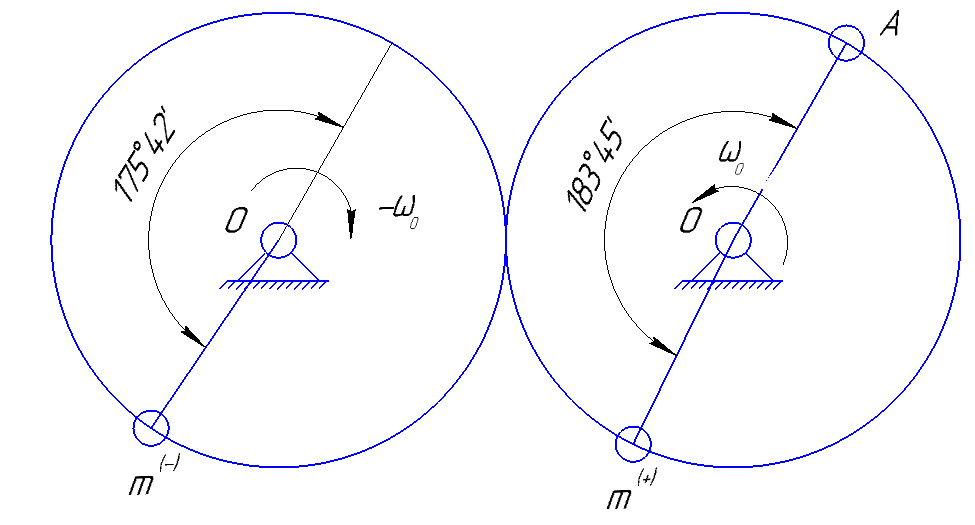
Рисунок 2.4.3.1 – Схема установки противовесов
Определим законы движения противовесов:
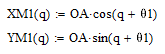
Координаты первого противовеса, центр окружности которого совпадает с точкой О, изменяются согласно уравнениям:
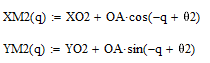
Центр окружности второго противовеса имеет координаты:

Координаты второго противовеса изменяются согласно уравнениям:
Найдём проекции ускорений противовесов на оси:
Силы, действующие на противовесы:

Силы, действующие на корпус машины после установки противовесов:
Совместный график годографов главного вектора сил инерции до и после установки противовесов представлен на рисунке 2.4.3.2.
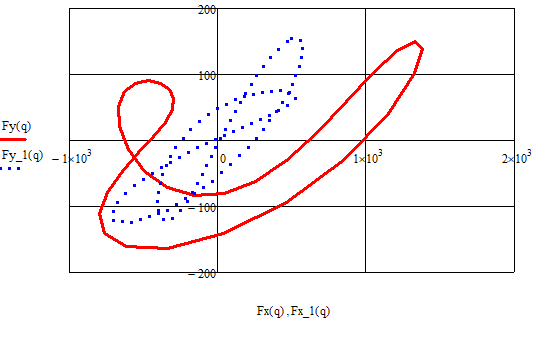
Рисунок 2.4.3.2 – Совмещённый график годографов главного вектора сил инерции
-
Целесообразность установки противовесов
В результате установки противовесов годограф главного вектора сил инерции изменился: существенно по оси ОХ, и менее существенно по оси ОУ.
Установка двух противовесов, уменьшающих первую гармонику неуравновешенной силы, не должны обеспечивать полное её устранение.
Масса механизма после установки противовесов определяется по формуле:
Результаты уравновешивания приведены в таблице 4.
Таблица 4 – Результаты уравновешивания
| | Фх, Н | Фу, Н | m, кг |
| Без противовесов | 2174,05 | 313,27 | 37,687 |
| С вращающимися противовесами | 1270,9 | 276,27 | 69,01 |
| Изменение | -41,5% | -11,8% | +83,1% |
Как видно из таблицы, установка противовесов хоть и уменьшила проекции главных векторов сил инерции на оси ОХ и ОУ на 41,5% и на 11,8% соответственно, но увеличила массу механизма в 1,83 раз, что допустимо только в редких случаях, когда нельзя сохранить внутреннюю виброактивность. В нашем случае сделаем вывод, что установка противовесов нецелесообразна.
-
Выбор двигателя-
Выбор двигателя по каталогу
-
Двигатель выбираем по необходимой (эквивалентной) мощности, т.е. такой мощности, которая требуется для того, чтобы механизм, испытывающий воздействие заданных сил, совершал требуемые движения.
Определим потребляемую двигателем мощность по формуле:
По каталогу выбираем следующий двигатель. Характеристики выбранного электродвигателя постоянного тока независимого возмущения представлены в таблице 5.
Таблица 5 – Характеристики выбранного двигателя
| Характеристика | Значение |
| Типоразмер | 2ПН112L |
| Номинальная мощность, Вт | 2200 |
| Номинальная частота вращения ротора, об/мин | 1500 |
| Коэффициент перегрузки | 2 |
| Номинальный ток, А | 11 |
| Номинальное напряжение, В | 220 |
| Сопротивление, Ом | 0,968 |
| Индуктивность, Гн | 0,014 |
| Момент инерции ротора,  | 0.018 |
-
Проверка условия загрузки двигателя
Найдём номинальный момент на двигателе по формуле:
Максимальным моментом на двигателе считаем момент, полученный при максимальной перегрузке (увеличение номинального моменты в 2 раза):
Из графика на рисунке 2.3.2.1 находим максимальное значение движущего момента:
Определяем выполняемость условия:

Т. к. 168,068
 178,98, выбранный двигатель удовлетворяет требованиям.
178,98, выбранный двигатель удовлетворяет требованиям.-
Определение параметров двигателя
Определим число оборотов в минуту на холостом ходу:
Определим электромагнитную постоянную времени:
Определим крутизну статической характеристики двигателя:
-
Выбор редуктора
Выбор редуктора осуществляется по передаточному числу:
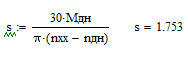
Был выбран цилиндрический двуступенчатый редуктор, схема которого представлена на рисунке 3.4.1:
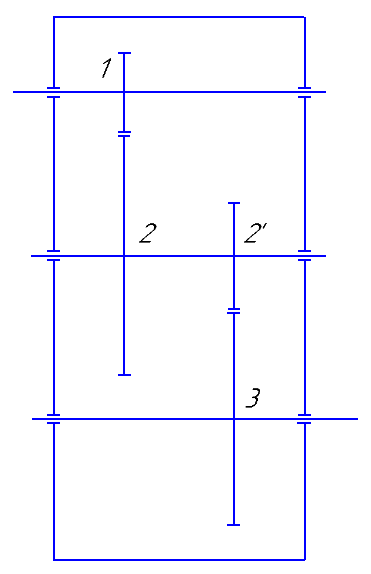
Рисунок 3.4.1 – Схема редуктора
Первая ступень редуктора имеет передаточное отношение 3, вторая – 2.
-
Динамическое исследование машинного агрегата-
Схема машинного агрегата
-
Машина включает в себя двигатель, передаточный и исполнительный механизма.
Схема машинного агрегата представлена на рисунке 4.1.1.
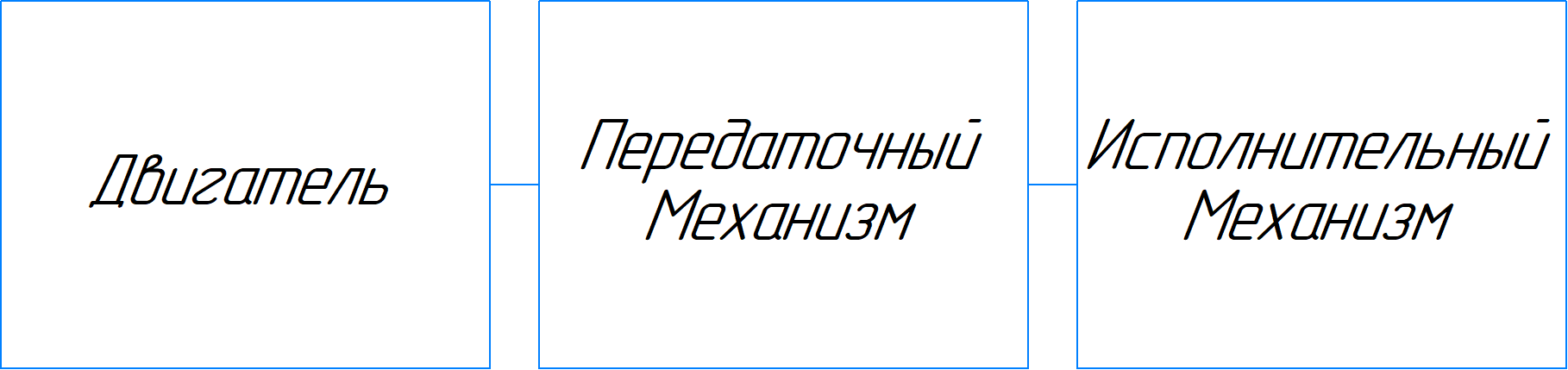
Рисунок 4.1.1 – Схема машинного агрегата
-
Уравнения динамики
Движение машины описываются следующими дифференциальными уравнениями движения:

где:
-
 — обобщённая координата;
— обобщённая координата; -
 — приведённый момент инерции;
— приведённый момент инерции; -
 — движущий момент;
— движущий момент; -
 — приведённый момент сил сопротивления;
— приведённый момент сил сопротивления; -
 — электромагнитная постоянная времени двигателя;
— электромагнитная постоянная времени двигателя; -
 — приведённая статическая характеристика двигателя.
— приведённая статическая характеристика двигателя.
-
Определение коэффициентов в системе дифференциальных уравнений-
Приведённый момент инерции
-
Приведённый момент инерции определяется как коэффициент при половине квадрата обобщённой скорости в выражении кинетической энергии механической системы:


Приведённый момент инерции редуктора:
Приведённый момент инерции механизма с учётом ротора двигателя и редуктора:
Полученная функция с целью упрощения динамических расчётов раскладывается в ряд Фурье с точностью до пяти гармоник:
Определим среднее значение:
Коэффициент при косинусе в разложении приведённого момента инерции: