Файл: Курсовая работа по дисциплине Цифровые системы управления в мехатронике АлФахри Ф. Ф. А. М.docx
Добавлен: 03.12.2023
Просмотров: 99
Скачиваний: 4
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
Проверяем соответствие полученного значения требованиям настройки на ОМ:

Из анализа графика на рис. 3.12 следует, что при воздействии неизменного по величине момента сопротивления Мс моментная составляющая ошибки ΔΩм примерно через 0,4 с становится равной нулю. Это говорит о том, что искусственная механическая характеристика стала абсолютно жёсткой. Увеличение точности обусловлено наличием в структуре регулятора скорости интегральной составляющей.
Далее переходим к построению ЛЧХ:
num1=[0.0004 0.064 1.244];
den1=[0.000034 0.0437 0];
sys1=tf(num1,den1)
num2=[22];
den2=[0.004 1];
sys2=tf(num2,den2)
num3=[0.79];[
den3=[0.00034 0.0516 1];
sys3=tf(num3,den3)
num4=[0.064];
den4=[0.011 1];
sys4=tf(num4,den4)
sys5=sys1*sys2*sys3*sys4
sys5 =
0.0004449 s^2 + 0.07119 s + 1.384
---------------------------------------------------------------------------------------
5.086e-13 s^6 + 9.043e-10 s^5 + 3.615e-07 s^4 + 5.287e-05 s^3 + 0.002944 s^2 + 0.0437 s
num = [0.0004449 0.07119 1.384];
den = [5.086e-13 9.043e-10 3.615e-07 5.287e-05 0.002944 0.0437 0];
bode(num, den)
Результаты моделирования представлены на рис. 3.12.
Из анализа графиков видно, что запасы устойчивости по фазе и амплитуде составляют Lз = 16,8 дБ (Gain Margin) и
 (Phase Margin) соответственно.
(Phase Margin) соответственно.Значение фазы
 соответствует частоте среза ωс, т. е. точке пересечения графика ЛАЧХ с линией 0 дБ.
соответствует частоте среза ωс, т. е. точке пересечения графика ЛАЧХ с линией 0 дБ.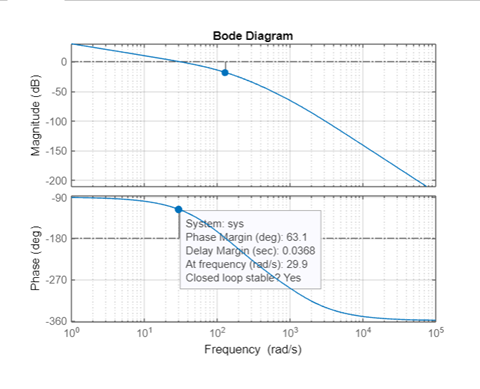
Рис. 3.12. Логарифмические частотные характеристики контура скорости
Вывод: результаты моделирования подтверждают правильность расчёта параметров РС и позволяют сделать вывод о том, что КС настроен на ОМ.
5. Синтез аналогового регулятора положения (графоаналитический метод)
5.1. Синтез регулятора положения в системе с астатизмом второго порядка
-
максимальная угловая скорость нагрузки Ωmax = 44 град/с; -
максимальное угловое ускорение нагрузки εmax = 11 град/с2; -
яшибка по скорости = 25 мин; -
ошибка по ускорению = 50 мин -
передаточное число редуктора i1 = 203; -
показатель колебательности М = 1,4; -
коэффициент передачи вращающегося трансформатора Kвт = 28,5В/рад. -
Моментная составляющая ошибки
 .
.
Определяем параметры желаемой передаточной функции ЭП. Коэффициент передачи по ускорению будет равен:
 с– 2.
с– 2. Значение базовой частоты определится по формуле:
 с– 1.
с– 1. По выражениям рассчитываем постоянные времени:
 с;
с;  с.
с.С учётом проведённых расчётов запишем желаемую передаточную функцию ЭП с астатизмом второго порядка:
 . (5.13)
. (5.13)Передаточная функция неизменяемой части:
 .
.Данные для определения передаточной функции
 примем по примеру 3.2 и составим программу:
примем по примеру 3.2 и составим программу:num1=[0.0004 0.064 1.244];
den1=[0.000034 0.0437 0];
sys1=tf(num1,den1)
num2=[22];
den2=[0.004 1];
sys2=tf(num2,den2)
num3=[0.79];
den3=[0.00034 0.0516 1];
sys3=tf(num3,den3)
sys4=sys1*sys2*sys3;
num5=[0.064];
den5=[0.01 1];
sys5=tf(num5,den5);
sys6=feedback(sys4,sys5);
num7=[28.5];
den7=[203.4 0];
sys7=tf(num7,den7);
sys8=sys6*sys7
sys8 =
0.001981 s^3 + 0.5151 s^2 + 37.86 s + 616.2
------------------------------------------------------------
9.405e-11 s^7 + 1.681e-07 s^6 + 6.828e-05 s^5 + 0.01025 s^4 + 0.6805 s^3 + 23.37 s^2 + 281.4 s
В приведенной программе оператор feedback осуществляет операцию замыкания отрицательной обратной связи контура скорости согласно уравнению:
 .
.Для определения передаточной функции регулятора положения составляем следующую программу:
num1=[18.667*0.433 18.667];
den1=[0.0722 1 0 0];
sys1=tf(num1, den1);
num2=[0.001981 0.5151 37.86 616.2];
den2=[9.405e-11 1.681e-07 6.828e-05 0.01025 0.6805 23.37 281.4 0];
sys2=tf(num2, den2);
sys3=sys1/sys2
sys3 =
7.602e-10 s^8 + 1.36e-06 s^7 + 0.000555 s^6 + 0.08412 s^5 + 5.692 s^4
+ 201.6 s^3 + 2711 s^2 + 5253 s
------------------------------------------------------------------------------
0.000143 s^6 + 0.03917 s^5 + 3.249 s^4 + 82.35 s^3 + 616.2 s^2
Составляем программу для определения ЛАЧХ регулятора положения, изображенную на рис. 5.2:
num=[7.602e-10 1.36e-06 0.000555 0.08412 5.692 201.6 2711 5253 0];
den=[0.000143 0.03917 3.249 82.35 616.2 0 0];
bode(num, den)
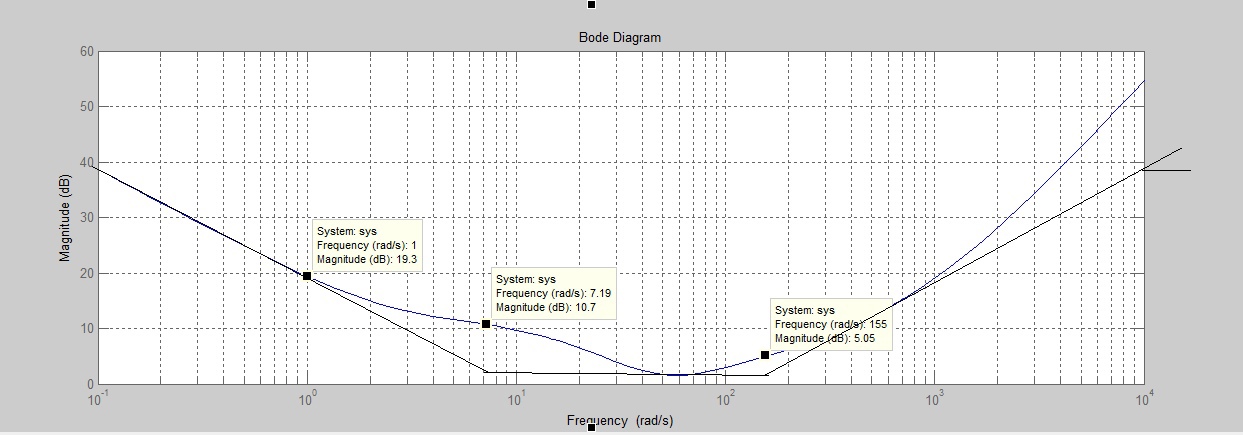
Рис. 5.2. ЛАЧХ регулятора положения
Переходим к анализу полученного графика. Низкочастотный участок ЛАЧХ регулятора положения проходит под наклоном –20 дБ/дек, постепенно изменяя наклон к среднечастотному участку до 0 дБ/дек. Высокочастотный участок полученной ЛАЧХ ( 100 с– 1) аппроксимируем двумя асимптотами с наклоном 20 дБ/дек и 0 дБ/дек.
Таким образом, проведённый анализ показывает, что ЛАЧХ следует аппроксимировать четырьмя асимптотами и придать регулятору положения свойства ПИД-регулятора.
Рассчитаем параметры передаточной функции регулятора положения. На частоте = 1 находим:
 дБ,
дБ,откуда
 = 9,2257 с– 1.
= 9,2257 с– 1.По графику, представленному на рис. 5.2, определяем частоты сопряжения 1 = 7,19 с– 1; 2 = 155 с– 1; 3 = 10000 с– 1 и рассчитываем постоянные времени:
 с;
с;  с;
с;  с.
с.Подставляя значение Т1, получаем коэффициент передачи регулятора положения:
 .
.С учётом полученных значений передаточная функция синтезированного регулятора положения принимает вид:
 .
.Для построения динамической модели ЭП представим передаточную функцию РП (ПИД-регулятора) в виде произведения:
 .
.| Рис. 5.1.2. Структурная схема динамической модели электропривода в среде MatLab |
Результаты моделирования показаны на рис. 5.1.3-5.1.5.
α(t), рад
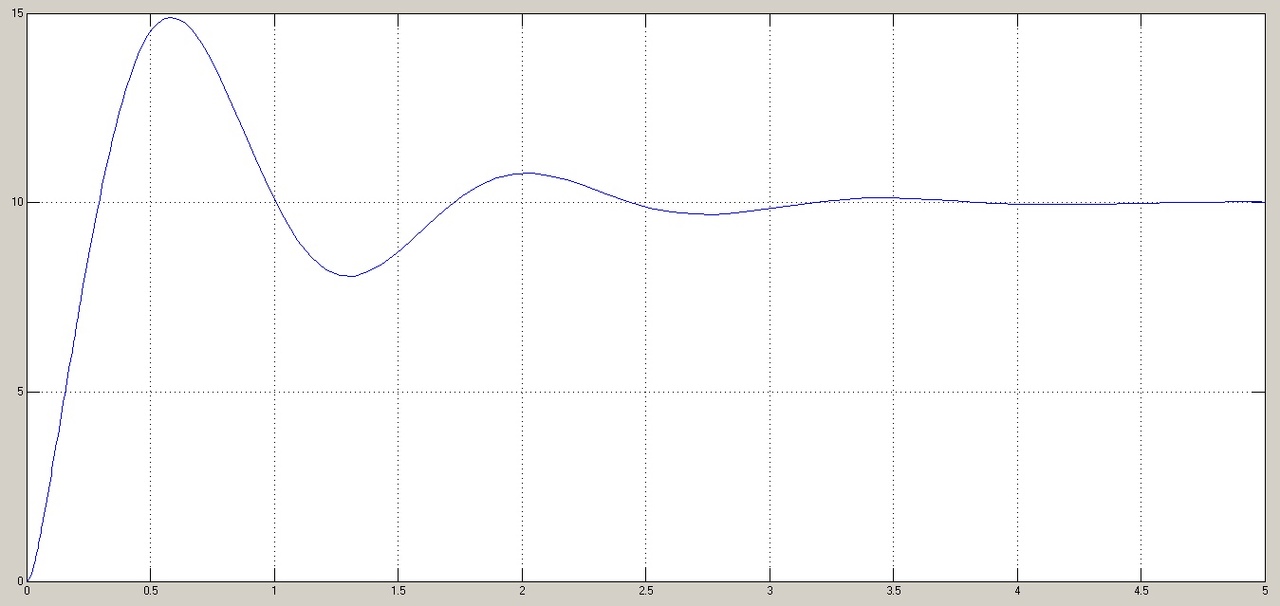 t, c
t, cРис. 5.1.3. Переходная характеристика системы по задающему воздействию
 , рад
, рад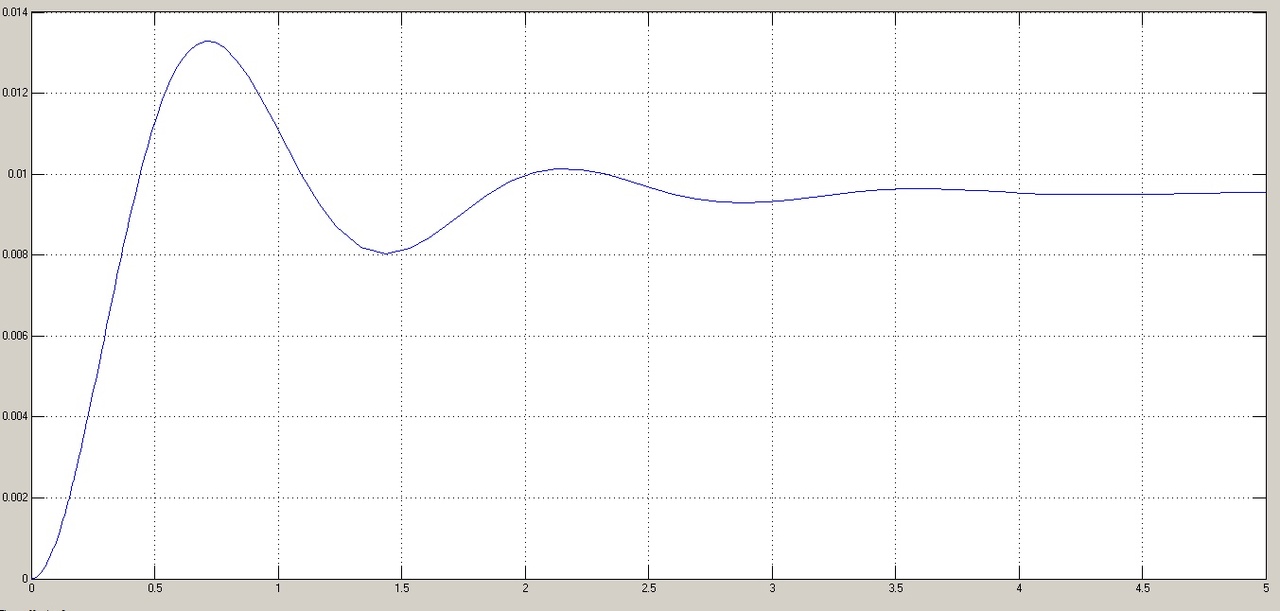 t, c
t, cРис. 5.1.4. График ошибки системы при квадратично возрастающем
задающем воздействии

 , рад
, рад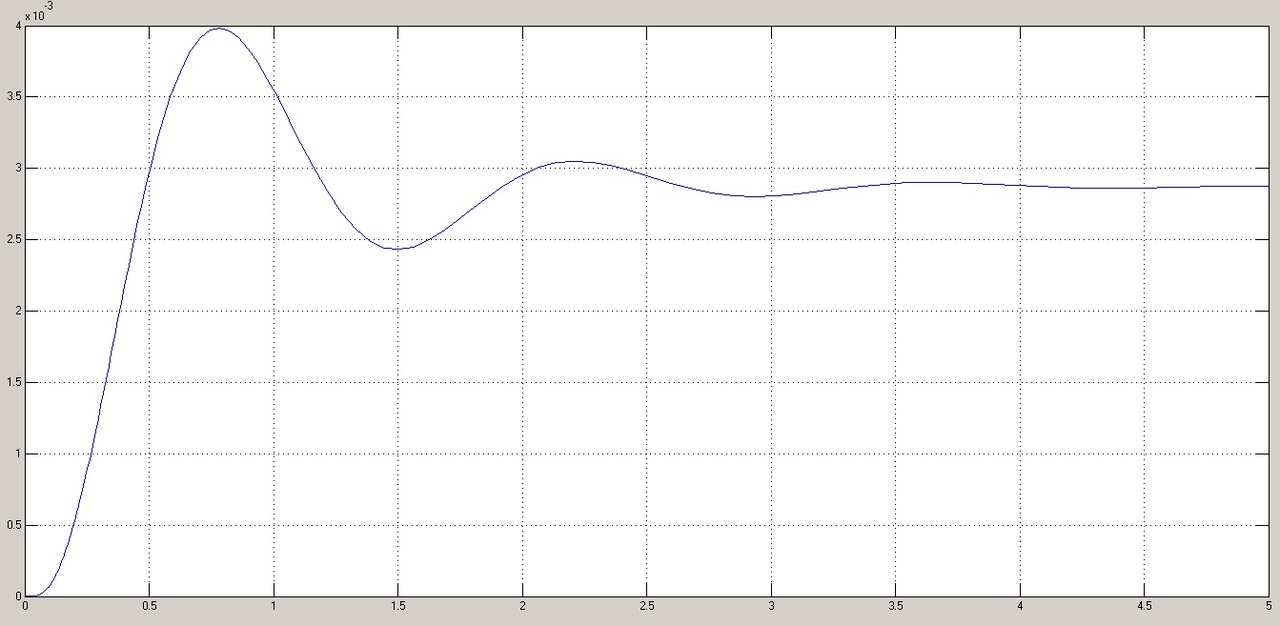 t, c
t, cРис. 5.1.5. График моментной составляющей ошибки системы
при квадратично возрастающем моменте сопротивления
Анализ графика (рис. 5.1.3) показывает, что следящий позиционный ЭП отрабатывает ступенчатое воздействие
 примерно за 2,0 с с перерегулированием
примерно за 2,0 с с перерегулированием  и числом колебаний N < 1, что соответствует заданному показателю колебательности М = 1,1.
и числом колебаний N < 1, что соответствует заданному показателю колебательности М = 1,1.Поскольку контур положения содержит ПИД-регулятор положения, очевидно, что при ступенчатом и линейно возрастающем задающем воздействии статическая ошибка и ошибка по скорости будут равны нулю. На рис. 5.1.4 представлена характеристика при отработке типового задающего воздействия
 /2. Установившаяся ошибка системы
/2. Установившаяся ошибка системы  составляет примерно 25,44 мин. Моментная составляющая ошибки при отработке квадратично возрастающего момента сопротивления
составляет примерно 25,44 мин. Моментная составляющая ошибки при отработке квадратично возрастающего момента сопротивления  составляет 3,3 мин по истечении 2,5 с (рис. 5.1.5).
составляет 3,3 мин по истечении 2,5 с (рис. 5.1.5).5.2. Синтез регулятора положения в системе с астатизмом первого порядка
Определяем параметры желаемой передаточной функции ЭП.
Коэффициент передачи по скорости:
 с– 1.
с– 1.Коэффициент передачи по ускорению:
 с– 2.
с– 2.Значение базовой частоты будет равно:
 с– 1.
с– 1.Рассчитываем постоянные времени:
 с;
с; с.
с.Рассчитываем протяжённость среднечастотного участка желаемой ЛАЧХ:
 .
.Частоту, соответствующую максимальному запасу по фазе определяем по формуле:
 с– 1.
с– 1.По условию обеспечения максимального запаса по фазе находим постоянную времени
 : 1/
: 1/ = 1/5,654 = 0,176 с.
= 1/5,654 = 0,176 с.Принимаем
= 2 с.С учётом проведённых расчётов желаемая передаточная функция ЭП с астатизмом первого порядка запишется как:

Составляем программу для определения передаточной функции регулятора положения ЭП с астатизмом первого порядка. Передаточную функцию неизменяемой части принимаем по примеру 5.1.
num1=[64.66 149.341];
den1=[0.1444 2.0722 1 0];
sys1=tf(num1,den1);
num2=[0.001981 0.5151 37.86 616.2];
den2=[9.405e-11 1.681e-07 6.828e-05 0.01025 0.6805 23.37 281.4 0];
sys2=tf(num2,den2);
sys3=sys1/sys2
sys3 =
6.081e-09 s^8 + 1.088e-05 s^7 + 0.00444 s^6 + 0.673 s^5
+ 45.53 s^4 + 1613 s^3 + 2.169e04 s^2 + 4.202e04 s
------------------------------------------------------------------
0.0002861 s^6 + 0.07849 s^5 + 6.536 s^4 + 167.9 s^3 + 1315 s^2 + 616.2 s
Составляем программу для определения ЛАЧХ регулятора положения, изображенную на рис. 5.2.1:
num=[ 6.081e-09 1.088e-05 0.00444 0.673 45.53 1613 2.169e04 4.202e04 0];
den=[0.0002861 0.07849 6.536 167.9 1315 616.2 0];