Файл: Руководство к лабораторным работам по дисциплине Теория управления для студентов по направлению Т. 02 Автоматика и управление в технических системах.doc
ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 11.12.2023
Просмотров: 98
Скачиваний: 2
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
-
Для случая идеального двухпозиционного реле, отсутствия коррекции по скорости и нулевого входного сигнала, т.е. при d=0, =0, g=0, задайте начальное отклонение x10 при х20=0 и пронаблюдайте фазовую траекторию, соответствующую свободному движению системы. Коэффициенты передачи интеграторов в модели выбирайте произвольно, исходя из удобства наблюдения изображения. Зарисуйте фазовый портрет системы, а также пронаблюдайте и зафиксируйте процессы х1(t) и x2(t). -
В этой же системе введите коррекцию по скорости, полагая 0, и зарисуйте вид фазовых траекторий при =0,25;0,5;1. Каждой из полученных фазовых траекторий поставьте в соответствие процессы х1(t) и x2(t). В случае сильной коррекции, приводящей к возникновению скользящего режима, обратите внимание на вид сигнала на выходе релейного элемента. Дайте объяснение полученному результату. -
Что Вы ожидаете получить результат, если обратную связь по скорости выбрать положительной? Проверьте Ваше предположение моделированием. -
Измените, вид релейной характеристики, введя зону нечувствительности, т.е. задайте d0 при m=1. Предскажите вид фазового портрета и проверьте Ваше предположение, моделированием системы, рассматривая свободное движение при отсутствии коррекции по скорости. -
Задайте начальное отклонение х10>d при х20=0 и пронаблюдайте фазовую траекторию при отсутствии коррекции по скорости, изменяя величину зоны нечувствительности. -
Введите коррекцию по скорости, задавая =0,25;0,5;1. Зарисуйте вид процессов х1(t) и x2(t) при заданной степени коррекции. -
Реализуйте релейную характеристику гистерезисного типа, задавая d0 и m=-1. При =0 задайте малое начальное отклонение х10<d и пронаблюдайте фазовый портрет и процессы х1(t) и x2(t). -
Введите коррекцию по скорости и пронаблюдайте для =0,25;0,5;1 фазовые траектории, соответствующие отработке малых х10<d и больших х10>d начальных отклонений. В чем принципиальное отличие этих траекторий? Как зависят от степени коррекции по скорости параметры предельного цикла и соответствующих ему периодических колебаний? -
Реализуйте релейную характеристику с гистерезисом и зоной нечувствительности, задавая d0 и 0<m<1. -
При =0 задайте начальное отклонение и пронаблюдайте фазовый портрет и соответствующие ему процессы х1(t) и x2(t). -
Введите коррекцию по скорости, задайте начальное отклонение х10>d и для различных , исследуйте вид фазовой траектории. Зарисуйте фазовые портреты и процессы х1(t) и x2(t).
Вторая часть
-
По результатам пп.1-12 сделайте выводы о динамических свойствах системы управления объектом с передаточной функцией .
. -
В системе управления со структурной схемой (рис.34) реализуйте идеальное двухпозиционное реле, задавая W0(p) линейной части передаточной функцией вида . Значения коэффиента передачи (k) и постоянной времени (Т) возьмите из табл.9.
. Значения коэффиента передачи (k) и постоянной времени (Т) возьмите из табл.9. -
Задайте начальное отклонение х10, при х20=0 и пронаблюдайте фазовую траекторию и процессы х1(t) и x2(t) при отсутствии коррекции по скорости. -
К чему приводит введение обратной связи по скорости? Что произойдет, если знак обратной связи по скорости выбран неправильно? Ваши ответы проверьте моделированием. Пронаблюдайте и зафиксируйте соответствующие фазовые портреты и процессы х1(t) и x2(t). -
В релейной характеристике введите зону нечувствительности, т.е. задавая d0 при m=1. -
Задавая различные начальные отклонения, удовлетворяющие условию х10>d , пронаблюдайте фазовые траектории при отсутствии коррекции по скорости. -
Введите коррекцию по скорости и исследуйте ее влияние на динамику системы при одних и тех же начальных отклонениях х10>d. -
Реализуйте релейную характеристику гистерезисного вида, задавая d0 при m=-1. -
Пронаблюдайте фазовые траектории и процессы х1(t) и x2(t) при отработке малых х10<d и больших х10>d начальных отклонений, изменяя величину коррекции по скорости и начиная со значения =0. -
Реализуйте релейную характеристику с гистерезисом и зоной нечувствительности, задавая d0 и 0<m<1. -
Задайте начальное отклонение х10>d и пронаблюдайте фазовые траектории, а также процессы х1(t) и x2(t) при различной степени коррекции по скорости. Полученные результаты зафиксируйте.
Третья часть
-
По результатам пп.13-23 сделайте выводы о динамических свойствах системы управления объектом с передаточной функцией . Значения коэффиента передачи (k) и постоянной времени (Т) возьмите из табл.9.
. Значения коэффиента передачи (k) и постоянной времени (Т) возьмите из табл.9. -
В системе управления со структурной схемой (рис.34) реализуйте идеальное двухпозиционное реле, задавая W0(p) линейной части передаточной функцией вида .
. -
Задавайте малое начальное отклонение х10 и пронаблюдайте фазовый портрет при отсутствии коррекции по скорости. Каков Ваш вывод о работоспособности системы управления? -
Введите коррекцию по скорости =0,2. Постепенно увеличивая начальное отклонение х10 , сделайте вывод о возможных режимах работы системы управления. Полученные результаты зафиксируйте в виде фазовых портретов и графиков х1(t) и x2(t). -
Определите величину начального отклонения, которое при =0,2 система не может устранить. Увеличивая степень коррекции по скорости, добейтесь наблюдения сходящего процесса. Попытайтесь выделить и пронаблюдать на экране индикатора границу между двумя качественно отличными режимами работы системы управления. Какие Вы испытываете затруднения? Объясните их причину. -
Реализуйте релейную характеристику с зоной нечувствительности, задавая d0 и m=1. -
При наличии коррекции по скорости исследуйте динамику системы управления, задавая малые отклонения в соответствии с условиями: х10 <0; х10 >0, при х10 =0. -
При наличии коррекции по скорости и больших начальных отклонениях проварьируйте величину коррекции и зарисуйте фазовые портреты и графики х1(t) и x2(t). -
Реализуйте релейную характеристику с гистерезисом и зоной нечувствительности, задавая d0 и 0<m<1. -
Изменяя величину коррекции по скорости, при начальном отклонении х10>d, пронаблюдайте вид фазовых траекторий. Сравните внешний вид фазовых траекторий, полученных при сильной коррекции по скорости, для случая однозначной и неоднозначной характеристик реле с зоной нечувствительности. -
По результатам пп. 24-33 сделайте вывод о динамических свойствах системы управления динамическим объектом с передаточной функцией вида , рассматривая случаи однозначных и неоднозначных релейных характеристик.
, рассматривая случаи однозначных и неоднозначных релейных характеристик.
Таблица 9
| № | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 |
| k | 1,1 | 9,4 | 4,6 | 5,7 | 2,2 | 8,3 | 3,5 | 6,8 | 7,9 |
| T | 0,44 | 0,36 | 0,85 | 0,22 | 0,73 | 0,58 | 0,11 | 0,96 | 0,69 |
Контрольные вопросы:
-
Почему метод фазовой плоскости относят к точным методам исследования нелинейных систем ? -
Какие Вам известны типы особых линий ? -
Что такое предельный цикл? -
Какие типы предельных циклов Вам известны ? -
Что называется линией переключения ? -
Как построить линию переключения ? -
Что такое скользящий режим ? -
Как установить возможность возникновения в системе управления скользящего режима ? -
В чем особенность фазового портрета для систем управления с неоднозначными нелинейностями ? -
Как по фазовой траектории определить поведение системы во времени ?
ЛАБОРАТОРНАЯ РАБОТА 10
Исследование нелинейных систем методом
гармонического баланса
Цель работы: практическое овладение методом гармонического баланса для анализа устойчивости замкнутых нелинейных систем; определение условий возникновения незатухающих периодических колебаний и нахождение параметров автоколебаний.
Краткие теоретические сведения
В соответствии с критерием устойчивости Найквиста незатухающие колебания в линейной системе возникают в том случае, когда амплитудно-фазовая характеристика разомкнутой системы проходит через точку с координатами [-1, j0]. Данное условие является также условием существования автоколебаний в гармонически линеаризованный нелинейной системе, т.е.
Wн(jw, a) = -1.
Так как линейная и нелинейная части системы соединены последовательно, то частотная характеристика разомкнутой нелинейной системы имеет вид
Wн(jw, a) = Wлч(jw)*WЭ(jw, a).
Тогда в случае статической характеристики нелинейного элемента условие принимает вид
Wлч(jw) = -
Решение уравнения относительно частоты и амплитуды автоколебаний можно получить графически как точку пересечения годографа частотной характеристики линейной части системы Wлч(jw) и годографа обратной характеристики нелинейной части -
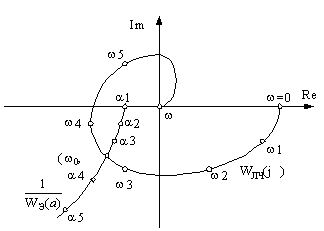 |
Рис.36. Годографы линейной и нелинейной частей системы
Для устойчивости автоколебательного режима с частотой w0 и амплитудой a0 требуется, чтобы точка на годографе нелинейной части -
На рис.36 дан пример расположения годографов для случая, когда в нелинейной системе существуют устойчивые автоколебания, так как a3 < a0 < a4 .
Задание и порядок выполнения лабораторной работы
-
Структурная схема исследуемой системы управления представлена на рис.37. В результате теоретического анализа определите возможность возникновения в этой системе режима автоколебаний для нелинейностей и передаточные функций, приведенных в табл.10, постоянную времени Т, брать из табл.11, согласно своему варианту. Клетки таблиц заполните ответами, указав для однозначных нелинейностей расчетные значения параметров автоколебаний. -
Разработайте методику исследования режима автоколебаний на ЭВМ. Проверьте моделированием теоретические результаты п. 1. -
Разомкните обратную связь и на вход сумматора подайте гармонический сигнал. Изучите форму сигналов на выходе нелинейности, а также на выходе первого, второго и третьего апериодических звеньев, варьируя частоту входного сигнала, для всех нелинейностей указанных в табл.10. Отметьте, как в графиках сигналов проявляется фильтрующее свойство линейной части системы управления. -
Замкните обратную связь. Реализация последнего из апериодических звеньев с использованием сумматора, позволяет получить сигнал, пропорциональный производной от сигнала на выходе линейной части системы управления. Используя эту возможность, пронаблюдайте фазовые траектории исследуемой системы управления, рассматривая линейную часть с передаточной функцией вида и нелинейности указанные в табл.10.
и нелинейности указанные в табл.10. -
Варьируя начальные условия или амплитуду входного сигнала, зафиксируйте фазовые траектории, соответствующие устойчивым и неустойчивым предельным циклам. Изучите процессы установления автоколебаний и зафиксируйте графики.
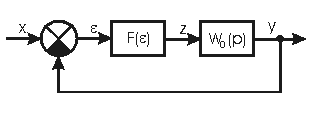
Рис.37
Таблица 10
| | F() | W0(p) | ||
| | | | ||
| 1 | 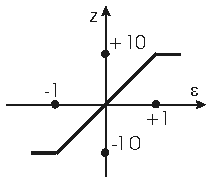 | | | |
| 2 | 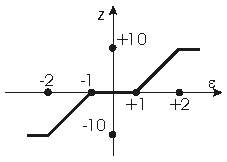 | | | |
| 3 | 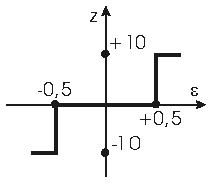 | | | |
| 4 | 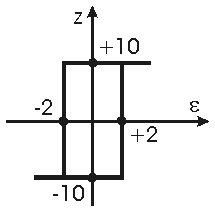 | | | |
Таблица 11
| № | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 |
| Т | 0,9 | 0,15 | 0,7 | 0,45 | 0,3 | 0,6 | 0,28 | 0,5 | 0,75 | 0,9 |
Контрольные вопросы
-
Сформулируйте общую постановку задачи анализа нелинейной системы методом гармонического баланса. -
Какие допущения лежат в основе метода гармонического баланса ? -
Что позволяет определить – метод гармонического баланса в результате анализа нелинейной и системы ? -
Что такое автоколебания ? -
Какой вид имеет уравнение Гольдфарба и что оно описывает ? -
Какие Вам известны способы решения уравнения Гольдфарба? -
Сформулируйте понятие устойчивости система управления в режиме автоколебаний?