Файл: Руководство к лабораторным работам по дисциплине Теория управления для студентов по направлению Т. 02 Автоматика и управление в технических системах.doc
ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 11.12.2023
Просмотров: 102
Скачиваний: 2
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
ЛАБОРАТОРНАЯ РАБОТА 11
Исследование импульсных систем управления
Цель работы: получение передаточных функций дискретных систем управления, путем применения z-преобразования; исследование временных характеристик дискретных систем управления.
Краткие теоретически сведения:
Характерная особенность импульсных систем заключается в том, что, по крайней мере, одна из координат (переменных) в них подвергается квантованию (прерыванию) по времени. Эти квантованные по времени величины при помощи импульсной модуляции преобразуются в последовательность импульсов, которые воздействуют на непрерывную часть системы. Процесс квантования и импульсной модуляции осуществляется импульсным элементом.
Таким образом, импульсная система состоит из импульсного элемента (ИЭ) и непрерывной части (НЧ), составленной из типовых динамических звеньев (рис.38).
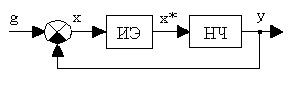
Рис.38. Функциональная схема импульсной системы:
ИЭ - импульсный элемент; НЧ - непрерывная часть
В импульсной системе импульсный элемент преобразует непрерывно изменяющуюся величину в последовательность модулированных импульсов (рис.39).
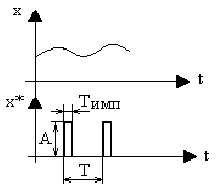
Рис.39. Временные диаграммы изменения сигналов на входе x и
выходе x* импульсного элемента
Z-преобразование. Подобно тому, как применение преобразования Лапласа к линейным дифференциальным уравнениям дало возможность получить удобную методику анализа непрерывных систем, для дискретных систем также был разработан ряд специальных преобразований. Из них наибольшее распространение получили дискретное преобразование Лапласа z-преобразование.
Z-пребразованием решетчатой функции x[nT] называется функция комплексного аргумента z, определяемая выражением
при z>R=1/ , где - радиус сходимости ряда.
Функция x[nT] называется оригиналом, а функция X(z) - изображением или z-пребразованием функции x[nT].
Преобразование, в котором z = esT, было введено Я.З.Цыпкиным под названием “дискретное преобразование Лапласа”.
Z-пребразование дает возможность получить из X(z) значение ординат решетчатой функции x[nT] в моменты квантования. Но в системах управления с непрерывными динамическими частями процесс непрерывен и между моментами n = 0, 1, 2 ... Для нахождения этих ординат необходимо рассмотреть последовательности для других дискретных моментов с тем же интервалом повторения, но смещенных на значение T: t = (n+)T при 0 1. Это можно делать с помощью модифицированного z-преобразования.
Таблица 12
Z - преобразования функций времени
| x(t) | X(s) | x[nT] | X(z) |
| (t) | 1 | [nT] | 1 |
| 1(t) | 1/s | 1[nT] | z/(z-1) |
| t | 1/s2 | nT | Tz/(z-1)2 |
| | 1/(s+) | | z/(z-d) (d= |
| t2/2! | 1/s3 | (nT)2/2! |  |
| | 1/(s+)2 | | (d= |
| | 1/(s+)3 | |  (d= |
Порядок проведения работы:
-
Даны передаточные функции
 ;
;  ;
;  . Исследуйте их временные характеристики (переходная характеристика, весовая характеристика), коэффициент α возьмите из табл.12.
. Исследуйте их временные характеристики (переходная характеристика, весовая характеристика), коэффициент α возьмите из табл.12. -
Примените z-преобразование получите передаточные функции дискретных объектов. -
Полученные математические модели реализуйте в виде блоков библиотеки MATLAB SIMULINK (Discrete). Исследуйте временные характеристики. -
Полученные результаты сравните с временными характеристиками непрерывных объектов. Сделайте вывод.
Таблица 12
| № | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 |
| α | 0,9 | 0,3 | 0,4 | 0,6 | 0,2 | 0,5 | 0,1 | 0,7 | 0,8 | 1,1 |
Контрольные вопросы:
-
Сформулируйте определение дискретных систем. Какова структура и классификация импульсных систем? -
Расскажите о математическом аппарате исследования импульсных систем. -
Сформулируйте теорему Котельникова-Шеннона. Поясните ее физический смысл и практическое значение при проектировании дискретных систем. -
Поясните методы определения передаточных функций импульсных систем. Каковы особенности передаточных функций статических и астатических систем? -
Каким образом определяются частотные характеристики импульсных систем? -
Какими способами определяются переходные процессы в дискретных системах? -
Сформулируйте условия устойчивости импульсных систем. -
Каким образом оценивается точность работы импульсных систем? -
Каков порядок синтеза цифровых систем? Перечислите методы определения передаточных функций корректирующих устройств. Укажите виды структурных схем цифровых фильтров. -
Запишите стандартную форму уравнений в пространстве состояний. Поясните физический смысл уравнений.
ЛИТЕРАТУРА
Линейные системы
-
Бесекерский В.А., Попов Е.П. Теория систем автоматического регулирования. - М.: Наука, 1975. - 768с. -
Попов Е.П. Теория линейных систем автоматического регулирования и управления. - М.: Наука, 1989. - 304с. -
Попов Е.П. Теория нелинейных систем автоматического регулирования и управления. - М.: Наука, 1979. - 256с. -
Первозванский А.А. Курс теории автоматического управления. - М.: Наука, 1986. - 616с. -
Воронов А.А. Основы теории автоматического управления. Особые линейные и нелинейные системы. - М.: Энергоиздат, 1981. - 304 с. -
Коновалов Г.Ф. Радиоавтоматика. - М.: Высшая школа, 1990. - 335с. -
Топчеев Ю.И. Атлас для проектирования систем автоматического регулирования. - М.: Машиностроение, 1989. - 752 с. -
Куропаткин П.В. Теория автоматического управления. - М.: Высшая школа, 1973. - 507 с. -
Теория управления. Терминология / Под ред. Б.Г.Волика. - М.: Наука, 1988. - 56 с. -
Расчет автоматических систем / Под ред. А.В.Фатеева. - М.: Высшая школа, 1973. - 336 с. -
Сборник задач по теории автоматического регулирования и управления / Под ред. В.А.Бесекерского. - М.: Наука, 1978. - 512 с. -
Иващенко Н.Н. Автоматическое регулирование. М.: Машиностроение, 1978. - 609 с. -
Юревич Е.И. Теория автоматического управления. - Л.: Машиностроение, 1980. - 412 с. -
Дидук Г.А. Методы теории матриц и их применение для исследования и проектирования систем управления. - Л.: СЗПИ, 1986. - 83 с. -
Мирошник И.В., Болтунов Г.И. Системы и устройства управления технологическим оборудованием. - Л., 1990. - 38 с. -
Имаев Д.Х. и др. Анализ и синтез систем управления. Теория. Методы. Примеры решения типовых задач с использованием персонального компьютера. - Санкт-Петербург, Гданьск, Сургут, Томск, 1998. - 172 с.
Нелинейные системы
-
Андриевский Б.Р., Фрадков А.Л. Избранные главы теории автоматического управления с примерами на языке MATLAB. - СПб.: Наука, 1999. - 467 с. -
Бесекерский В.А., Попов Е.П. Теория систем автоматического регулирования. - М.: Наука, 1975. - 768 с. -
Бесекерский В.А. Цифровые автоматические системы. - М.: Наука, 1976. - 576 с. -
Бесекерский В.А., Изранцев В.В. Системы автоматического управления с микроЭВМ. - М.: Наука, 1987. - 320 с. -
Воронов А.А. Основы теории автоматического управления. Особые линейные и нелинейные системы. - М.: Энергоиздат, 1981. - 304 с. -
Дроздов В.Н., Мирошник И.В., Скорубский И.В. Системы автоматического управления с микроЭВМ. - Л.: Машиностроение, 1989. - 284 с. -
Иващенко Н.Н. Автоматическое регулирование. - М.: Машиностроение, 1978. - 609 с. -
Имаев Д.Х., Ковальски З., Кузьмин Н.Н., Пошехонов Л.Б., Цапко Г.П., Яковлев В.Б. Анализ и синтез систем управления. Теория. Методы. Примеры решения типовых задач с использованием персонального компьютера. - Санкт-Петербург, Гданьск, Сургут, Томск, 1998. - 172 с. -
Коновалов Г.Ф. Радиоавтоматика. - М.: Высшая школа, 1990. - 335 с. -
Куропаткин П.В. Теория автоматического управления. - М.: Высшая школа, 1973. - 507 с. -
Мирошник И.В., Никифоров В.О., Фрадков А.Л. Нелинейное и адаптивное управление сложными динамическими системами. - СПб.: Наука, 2000. - 549 с. -
Первозванский А.А. Курс теории автоматического управления. - М.: Наука, 1986. - 616 с. -
Попов Е.П. Теория линейных систем автоматического регулирования и управления. - М.: Наука, 1989. - 304 с. -
Попов Е.П. Теория нелинейных систем автоматического регулирования и управления. - М.: Наука, 1979. - 256 с. -
Расчет автоматических систем / Под ред. А.В.Фатеева. - М.: Высшая школа, 1973. - 336 с. -
Теория автоматического управления: Учеб. для вузов в 2-х частях / Под ред. А.А.Воронова. 2-е изд. - М.: Высшая школа, 1986. -
Топчеев Ю.И. Атлас для проектирования систем автоматического регулирования. - М.: Машиностроение, 1989. - 752 с. -
Цыпкин Я.З. Теория линейных импульсных систем. - М.: Физматгиз, 1963. - 968 с. -
Цыпкин Я.З. Релейные автоматические системы. - М.: Наука, 1974. - 576 с. -
Юревич Е.И. Теория автоматического управления. - Л.: Машиностроение, 1980. - 412 с.