Файл: Учебный курс для студентов очной и заочной форм обучения.doc
ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 11.12.2023
Просмотров: 921
Скачиваний: 6
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
Механизмы преобразования одного вида движения в другой (общие сведения)
В данном учебнике «Детали машин» в пределах учебной программы рассматриваются рычажные, кулачковые и храповые механизмы: назначение, принцип работы, устройство, область применения.
Подробно этот раздел изучается в курсе «Теория механизмов и машин».
Рычажные механизмы
Рычажные механизмы предназначены для преобразования одного вида движения в другое, колебательное вдоль или вокруг оси. Наиболее распространенные рычажные механизмы — шарнирный четырехзвенный, кривошипно-ползунный и кулисный.
Шарнирный четырехзвенный механизм (рис.8) состоит из кривошипа 7, шатуна 2 и коромысла 3. В зависимости от соотношения длин рычагов 1, 2, 3 механизм и его звенья будут выполнять разные функции. Меха низм, изображенный на рис.8, со звеном 1, наиболее коротким из всех, называется однокривошипным. При вращении кривошипа. 1 вокруг оси О, коромысло 3 совершает колебательное движение вокруг оси О2, шатун 2 совершает сложное плоскопараллельное движение.
Кривошипно-ползунный механизм получают из шарнирного четырехзвенника при замене коромысла 3 ползуном 3 (рис. 9). При этом вращение кривошипа 1, ползун 3 совершает колебательное прямолинейное движение вдоль направляющей ползуна. В двигателях внутреннего сгорания, таким ползуном, является поршень, а направляющей — цилиндр.
Кулисные механизмы служат для преобразования равномерно-вращательного движения кривошипа в качательное движение кулисы или нерав номерное прямолинейное колебательное (возвратно-поступательное) движение ползуна. Кулисные механизмы используются в строгальных станках, когда рабочий ход (снятие стружки) происходит медленно, а нерабочий ход (возвращение
резца) — быстро. На рис.10 показана схема кулисного механизма с входным поршнем на шатуне. Такая схема используется в механизмах гидронасосов ротационного типа с вращающимися лопастями, а также в различных гидро- или пневмоприводах механизма с входным поршнем 3 на шатуне, скользящем в качающемся (или вращающемся) цилиндре.
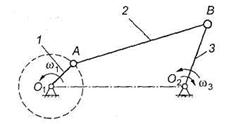
Рис.8. Шарнирный четырехзвенный механизм: 1 — кривошип; 2 — шатун; 3 — коромысло
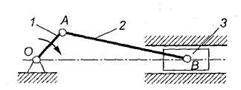
Рис.9. Кривошипно-шатунный механизм: 1 — кривошип; 2—шатун; 3 — ползун
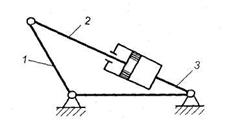
Рис.10. Кулисный механизм: / — кривошип; 2 — шатун; 3 — поршень
Кулачковые механизмы
Кулачковые механизмы предназначены для преобразования вращательного движения ведущего звена (кулачка) в заведомо заданный закон возвратно-поступательного движения ведомого звена (толкателя). Широко применяются кулачковые механизмы в швейных машинах, двигателях внутреннего сгорания, автоматах и позволяют получить заведомо заданный закон движения толкателя, а также обеспечить временные остановы ведомого звена при непрерывном движении ведущего.
На рис. 11 приведены плоские кулачковые механизмы. Кулачковый механизм состоит из трех звеньев: кулачка 1, толкателя 2 и стойки (опоры) 3. Для уменьшения трения в кулачковый механизм вводится ролик. Ведущим звеном в кулачковом механизме является кулачок. Кулачок может со вершать как вращательное движение, так и поступательное. Движение ведомого звена — толкателя — может быть поступательным и вращательным.
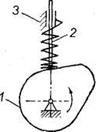
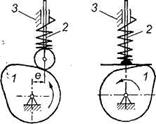
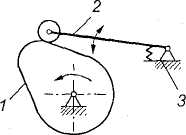
Рис. 11. Кулачковые механизмы:
1 — кулачок; 2 — толкатель; 3 — стойка (опора)
Недостатки кулачковых механизмов: высокие удельные давления, повышенный износ звеньев механизма, необходимость обеспечения замыкания звеньев, что приводит к дополнительным нагрузкам на звенья и к усложнению конструкции.
Храповые механизмы
Храповые механизмы относятся к механизмам прерывистого действия, которые обеспечивают движения ведомого звена в одном направлении с периодическими остановками. Конструк тивно храповые механизмы делятся на нереверсивные с внутренним зацеплением и с храповым колесом, а также реверсивные в виде зубчатой рейки.
Нереверсивный храповый механизм с внутренним зацеплением (рис. 12).Ведущим звеном может быть как храповое колесо внутреннего зацепления /, соединенное с зубчатым колесом внешнего зацепления, так и втулка 4 с закрепленной на ней собачкой 3, подпружиненной к зубьям храпового колеса 1 пружиной 2.
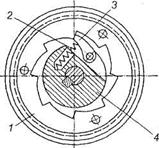
Рис. 12. Нереверсивный храповый механизм с внутренним зацеплением:
1 — храповое колесо; 2 — пружина; 3 — собачка; 4 — втулка
В нереверсивных механизмах (рис. 13) храповое колесо выполняют в виде рейки 1 в направляющих, и тогда собачка 2 сообщает рейке с храпо вым зубом прерывистое прямолинейное движение. В этом случае преду сматривает устройство, которое возвращает рейку в начальное положение.
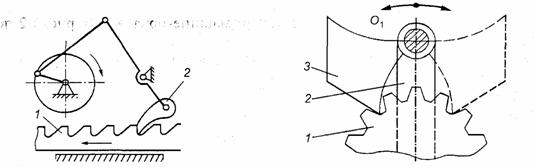
Рис. 13.Нереверсивный храповый механизм: Рис. 14. Реверсивный храповый механизм:
1 — рейка; 2 — собачка 1- храповик; 2 — ведущий рычаг; 3 — собачка
Реверсивные храповые механизмы (рис. 14) имеют: храповое колесо 1 с зубьями эвольвентного профиля, а на ведущем рычаге 2 шарнирно устанавливают собачку 3, которую при необходимости реверса перебрасывают во
круг оси Ох.
В машино- и приборостроении применяют храповые механизмы, в ко торых механизм (ведомое звено) двигается в одном направлении с периодическими остановками (металлообрабатывающие станки, задняя ведущая втулка у велосипеда и др.).
Мальтийский механизм (крест)
Мальтийские кресты широко применяются в машинных автоматах. Они относятся к механизмам прерывистого действия и предназначены для преобразования равномерного вращения ведущего звена в периодические с остановками ведомого звена, работают плавно без ударов (в отличие от храповых механизмов).
Наиболее распространенные мальтийские механизмы с внешним зацеплением (рис. 15). Такой механизм состоит из ведущего кривошипа 7, ролика 2 на его конце, мальтийского креста 3. При вращении кривошипа 1 ролик 2 входит в паз 4мальтийского креста 3 и возвращает его на заданный угол. После выхода ролика 2 из паза 4 угловое положение мальтийского креста фиксируется цилиндрической поверхностью диска.
Мальтийские механизмы проектируются с числом пазов мальтийского креста, равным 3 + 12. Расчеты храповых механизмов на прочность проводятся в зависимости от вращающего момента на вале храпового колеса.
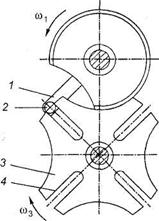
Рис. 15. Мальтийский механизм: 1 — ведущий кривошип;
2 — ролик; 3 - мальтийский крест; 4 - паз мальтийского креста
Вопросы для самопроверки
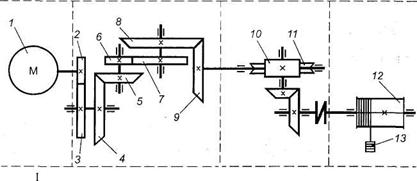
- Опишите взаимное положение валов в переда че 10—11, см. рис. 16
1. Передача с параллельными осями валов
2. Передача с пересекающимися осями валов
3. Передача с перекрещивающимися осями валов
4. Определить нельзя
- Показать на рис. 16 червячную передачу
1. Поз. 2-3
2. Поз. 4-5
3. Поз. 6-7
4. Поз. 10-11
5. Поз. 12-13
- Покажите на рис.16 машину-орудие (поз. I, II, III,IV)
1) I
2) II
3) III
4) IV
- Какое назначение меха нических передач
1. Вырабатывать энергию
2. Воспринимать энергию
3. Затрачивать энергию на преодоление внешних сил, непосредственно связанных с процессом производства
4. Преобразовывать скорость, вращающий момент, направление вращения
- Как классифицируют зубчатую передачу по принципу передачи движения?
1. Трением
2. Зацеплением
3. Непосредственно контактом деталей, сидящих на ведущем и ведомом валах
4. Передача гибкой связью
- Покажите на рис. 16 ведущее колесо третьей пары
1. Поз. 3
2. Поз. 4
3. Поз. 5
4. Поз. 6
5. Поз. 7
- Передача 4—5 (см. рис. 16) понижающая или повышающая?
1. Понижающая
2. Повышающая
- Сколько ступеней имеет передача, показанная на рис. 16?
1) 1
2) 2
3) 6
4) 12
- Какое из приведенных отношений называют передаточным числом одноступенчатой передачи?
1) n2/n1
2) D2/D1
3) D1/D2
II III IV
Рис. 16. Кинематическая схема многоступенчатой передачи
- Как называется передача, кинематическая схема которой показана на рисунке?
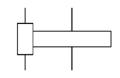
1. Цилиндрическая
2. Коническая
3. Червячная
4. Планетарная
- Как называется передача, кинематическая схема которой показана на рисунке?
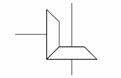
1. Цилиндрическая
2. Коническая
3. Червячная
4. Планетарная
- Как называется передача, кинематическая схема которой показана на рисунке?
1. Цилиндрическая