Файл: Информация, определение и назначение. Понятие "Данные".docx
ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 12.12.2023
Просмотров: 147
Скачиваний: 1
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
СПД дорожного уровня обеспечивают в пределах железной дороги обмен информацией между абонентами и системами обработки данных, решающими прикладные задачи управления перевозками и другими видами деятельности на ж. - д. транспорте. Основной системой, требующей непрерывного обмена информацией и создающей интенсивные информационные потоки, которые должна передавать СПД дороги, является АСУ перевозками (АСУП). Для обеспечения функционирования АСУП необходимо связать большие системы обработки данных в ИВЦ дороги с многочисленными АРМ, поставляющими оперативные данные о движении, дислокации и изменении состояния поездов, вагонов и грузов. СПД дорожного уровня может производить обмен информацией с СПД-ЛП, а так же с локальными вычислительными сетями управления дороги, отделений дороги, ЦФТО и т.д.
АСУСС и АСУГУ также обмениваются информацией с ИВЦ дороги по выделенным телефонным каналам.
Отдельную группу абонентов СПД дорожного уровня представляют комплексные системы АРМ (САРМ) на станциях. В САРМ объединяются группы абонентов, использующих в своей работе общий сервер, функционально ориентированный на решение определенного круга задач управления перевозками.
СПД сетевого уровня осуществляет межрегиональный обмен информацией между ГВЦ ОАО и ИВЦ железных дорог, а также ИВЦ соседних дорог, Сеть построена на базе выделенных телефонных каналов связи,
В СПД сетевого уровня реализуется межмашинный обмен информацией между ИВЦ соседних дорог. По выделенным каналам связи передаются данные о составе поездов (ТГНЛ поездов), переходящих с одной дороги на другую, а также другие сообщения, обеспечивающие ведение поездных и вагонных моделей на уровне дороги.
36. Сети передачи данных на ЖД транспорте. Радиально-узловая и многоточечная структуры.
Многоточечная структура СПД ЛП ориентирована на линейную топологию участка железной дороги. В СПД ЛП с такой структурой сервер СПД производит циклический опрос узлов КИ по групповому каналу. За время цикла опроса каждый узел получает долю времени для занятия группового канала и производит за это время обмен информацией между узлом и сервером СПД. Многоточечная структура СПД ЛП представлена на рисунке 2.
38. АСОУП. Определение, состав АСОУП.
АСОУП – это пакет программ, связанный с управлением движением поездов, работой сортировочных станций и маршрутами движения поездов.
Автоматизированная система оперативного управления перевозками на дороге (АСОУП) предназначена для создания и поддержания в реальном времени информационной динамической модели перевозочного процесса, прогнозирования и текущего планирования эксплуатационной работы предприятий железной дороги.
АСОУП является центром всей системы управления перевозками, она обеспечивает оперативной и достоверной информацией практически все уровни управления через системы на станциях и других линейных предприятиях, а также путем взаимодействия с системами верхнего уровня.
В состав АСОУП входят следующие значимые дорожно-сетевые системы:
1. автоматизированная система управления работой сортировочных станций – АСУСС;
2. автоматизированная система управления пассажирскими перевозками АСУ «Экспресс»;
3. интегрированная обработка дорожных ведомостей (ИОДВ);
4. интегрированная обработка маршрутов машиниста (ИОММ АСУТ).
43. Понятие "Локомотив". Основные контролируемые параметры. Технические состояния объектов. Основные виды датчиков.
Локомотив — самоходный рельсовый экипаж, предназначенный для тяги несамоходных вагонов. (паровоз, тепловоз, электровоз), движущаяся по рельсам и предназначенная для передвижения железнодорожных поездов.
Локомотив и его оборудование являются «объектом технического диагностирования», у которого следует определить:
1. техническое состояние (постановка диагноза);
2. места отказа (локализация отказа);
3. причина отказа;
4. прогнозирование технического состояния;
5. сбор аварийной схемы (перспективная функция).
Основные диагностические параметры – это множество входных и выходных сигналов объекта диагностирования. Их использование обязательно и достаточно для проверки работоспособности. Внутреннее состояние представляет собой совокупность дополнительных диагностических параметров и используется для локализации отказа и прогнозирования работоспособности.
Множество технических состояний состоит из 2-х элементов:
1. исправное состояние;
2. неисправное состояние.
Датчики
Главное при диагностировании – это контролепригодность самого объекта диагностирования.
Датчик – устройство, преобразующее контролируемую физическую величину в электрический сигнал: все измерительные системы могут измерить один из следующих параметров электрического сигнала, в который и надо преобразовать контролируемый показатель:
1. напряжение;
2. частота импульсного электрического сигнала;
3. периодичность поступления электрического сигнала;
4. число импульсов электрического сигнала;
5. длительность электрического сигнала;
6. наличие электрического сигнала (есть или нет).
Установка датчиков в цепях локомотива – достаточно дорогой и не всегда возможный процесс. Один из ключевых датчиков – датчик силового тока с гальванической развязкой, требующий дополнительного питания.
Второй не менее важный датчик – датчик угла поворота, используемых для определения скорости вращения колесных пар для дальнейшего вычисления скорости движения локомотива. Устанавливают датчик обычно на две колесные пары и более. В последних локомотивах – на все колесные пары.
Датчик давления широко используется для диагностирования дизеля и автотормозов.
Датчик виброускорений пока не так распространен в бортовых системах, как предыдущие – пока чаще используется в стационарных системах диагностирования («Прогноз», «Вектор» и др.).
44. Колесно-моторный блок и его контролируемые параметры.
Главный параметр КМБ – это электрический ток. Именно ток определяет силу тяги ТЭД, КМБ и локомотива в целом. Можно утверждать, что ток ТЭД – главный диагностический параметр локомотива.
Ток ТЭД представляет собой аналоговый сигнал, меняющийся во времени в диапазоне от 0 до тысяч Ампер. При анализе тока следует контролировать следующие его характеристики:
1. абсолютное значение, А;
2. превышение времени езды с пятиминутным током;
3. превышение времени езды с часовым током;
4. наличие скачков тока;
5. скорость нарастания тока;
6. разброс токов по параллельно работающим КМБ;
7. колебание тока; наличие высокочастотных помех;
8. срабатывание защит по скорости нарастания тока, по разбросу токов
По параметрам тока ТЭД можно судить о работоспособности большинства систем локомотива.
Наряду с током каждого из тяговых электродвигателей желательно знать общий ток локомотива. Особенно это актуально для тепловозов, где генератор электрического тока находится непосредственно на локомотиве.
Наряду с током ТЭД у КМБ желателен контроль следующих параметров:
1. скорость вращения колесных пар;
2. температуры обмоток якоря и обмоток возбуждения;
3. наличие искрения коллектора;
4. напряжение на ТЭД;
5. вибрация;
6. температура подшипников буксового узла;
7. наличие боксования и юза.
47. МСУД-Н. Функциональная схема в режиме тяги, ее работа.
Микропроцессорная система управления и диагностики (МСУД-Н) предназначена для управления силовой схемой одной секции электровоза. При этом МСУД-Н реализует следующие функции:
1. ввод сигналов задания с контроллера управления электровозом;
2. ввод и обработка сигналов с датчиков тока (ДТ) тяговых электродвигателей (ТЭД);
3. ввод и обработка сигналов с ДТ возбуждения ТЭД;
4. ввод и обработка сигналов с датчиков скорости (ДС);
5. ввод и обработка сигналов с датчиков напряжения в контактной сети (ДН);
6. ввод и обработка сигналов с датчиков напряжения на ТЭД;
7. формирование нерегулируемых углов α0, α0З, в режиме тяги;
8. формирование регулируемого угла αР;
9. реализация алгоритма управления выпрямительно-инверторным преобразователем ВИП;
10. формирование выходных импульсов управления каналами ВИП (α1 … α8);
11. реализация алгоритма управления ВУВ;
12. формирование импульсов по двум выходным каналам ВУВ (αВ1 … αВ2);
13. реализация алгоритма управления шунтированием обмотки возбуждения (ОВ);
14. формирование импульсов управления шунтированием (αШ1 … αШ4);
15. защита от боксования;
16. защита по максимальному току;
17. защита по темпу нарастания тока;
18. защита по соотношению тока возбуждения и якоря ТЭД;
19. программная реализация регулятора скорости;
20. программная реализация регулятора тока;
21. программная реализация регулятора тока возбуждения;
22. самодиагностика и автоматический переход на резервные схемы включения аппаратных средств;
23. взаимодействие с бортовым компьютером (БК);
24. прием команд машиниста через клавиатуру управления (КУ) БК;
25. реализация на базе БК системы подсказок для машиниста по работе с локомотивом, в том числе в аварийных ситуациях
;
26. диагностирование технического состояния локомотива по имеющимся в системе данным;
27. интеллектуальная защита от повторного включения аппаратов защиты для предотвращения пожароопасных ситуаций;
28. накопление диагностической информации с возможностью ее переноса на переносной компьютер или другой накопитель информации;
29. привязка всей диагностической информации к реальному времени;
30. функции выдачи рекомендаций машинисту по порядку действий в тех или иных ситуациях, в том числе в аварийных;
31. возможность в дальнейшем развития задач навигации с привязкой к электронной карте;
32. самотестирование с определением работоспособности МСУД-Н и автоматическим сбором резервной схемы включения аппаратных средств;
33. возможность взаимодействия с приборами безопасности, прежде всего с САУТ-ЦМ.
34. автоматическое определение числа рабочих секций;
35. распределение нагрузки между секциями;
36. автоматический вход в ручной режим работы в случае нарушения связи с бортовым компьютером (БК).
На рисунке 1 представлена состоящая из четырех узлов функциональная схема МСУД-Н:
1. МСУД-Н-БУ – подсистема управления ВИП, ВУВ, ШТ;
2. МСУД-Н-ДСП – подсистема диспетчеризации;
3. МСУД-Н-ВВ – подсистема ввода вывода сигналов;
4. Среднего уровня бортового компьютера БК.
Сигналы управления поступают в МСУД-Н:
1. с контроллера машиниста КМЭ в виде сигналов Iз и Vз;
2. датчиков тока I1… I4;
3. датчиков скорости (частоты вращения колесных пар) n1 … n4;
4. датчиков слежения за напряжением контактной сети Uсл1… Uсл4;
5. сигналы с релейно-контакторных аппаратов (РКА) в блок ВВ.
Входные сигналы обрабатываются входными аппаратными средствами блока синхроимпульсов (БСИ), блоком формирования амплитудных сигналов (БФА), блоком формирования импульсных сигналов (БФИ) и ВВ с дальнейшей передачей оцифрованной информации в микропроцессорный блок БМК.
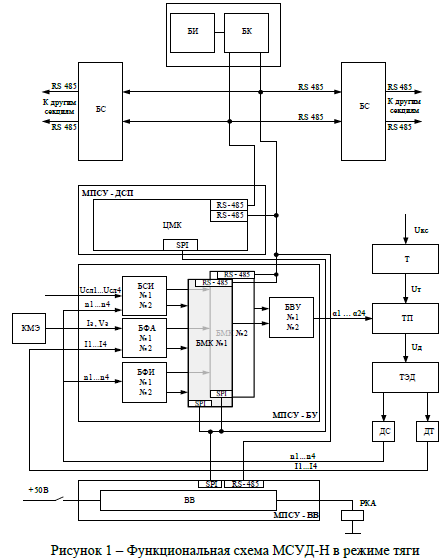
При этом:
1. БСИ по входным сигналам осуществляет аппаратное вычисление сигналов управления ВИП;
2. БФА работает с аналоговыми сигналами и в своей основе содержит операционные усилители, выполняющие роль нормирующих;
3. БФИ работает с импульсными сигналами и по сути представляет собой частотомер (счетчик сигналов);
4. ВВ работает с бинарными сигналами (включен/выключен) РКА цепей управления.
Все принятые сигналы поступают в БМК по внутреннему интерфейсу SPI.