Файл: Информация, определение и назначение. Понятие "Данные".docx
ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 12.12.2023
Просмотров: 143
Скачиваний: 1
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
Выходные сигналы МСУД-Н также формируются аппаратно в:
1. БВУ – импульсные сигналы управления углом открытия тиристоров;
2. ВВ – включение и выключение РКА
В каждый полупериод работы ТП происходит информационный обмен между МСУД-Н-БУ и МСУД-Н-ДСП по интерфейсу SPI. МСУД-Н-ДСП, в свою очередь, осуществляет информационный обмен с бортовым компьютером БК по интерфейсу RS-485. По этому же интерфейсу происходит обмен информацией с ведомыми (или ведущей) секциями этого же или работающих в сплотке электровозов.
МСУД-Н допускает работу по системе многих единиц (СМЕ) до четырех секций, каждая из которых работает функционально автономно. Все параметры, необходимые для работы МСУД-Н поступают и обрабатываются в блоках управления в пределах своей секции. Связь с МСУД-Н других секций, осуществляется по интерфейсу RS-485 через блоки сопряжения (БС). При запуске электровоза, определяется ведущая МСУД-Н, остальные работают в режиме подчиненного регулирования.
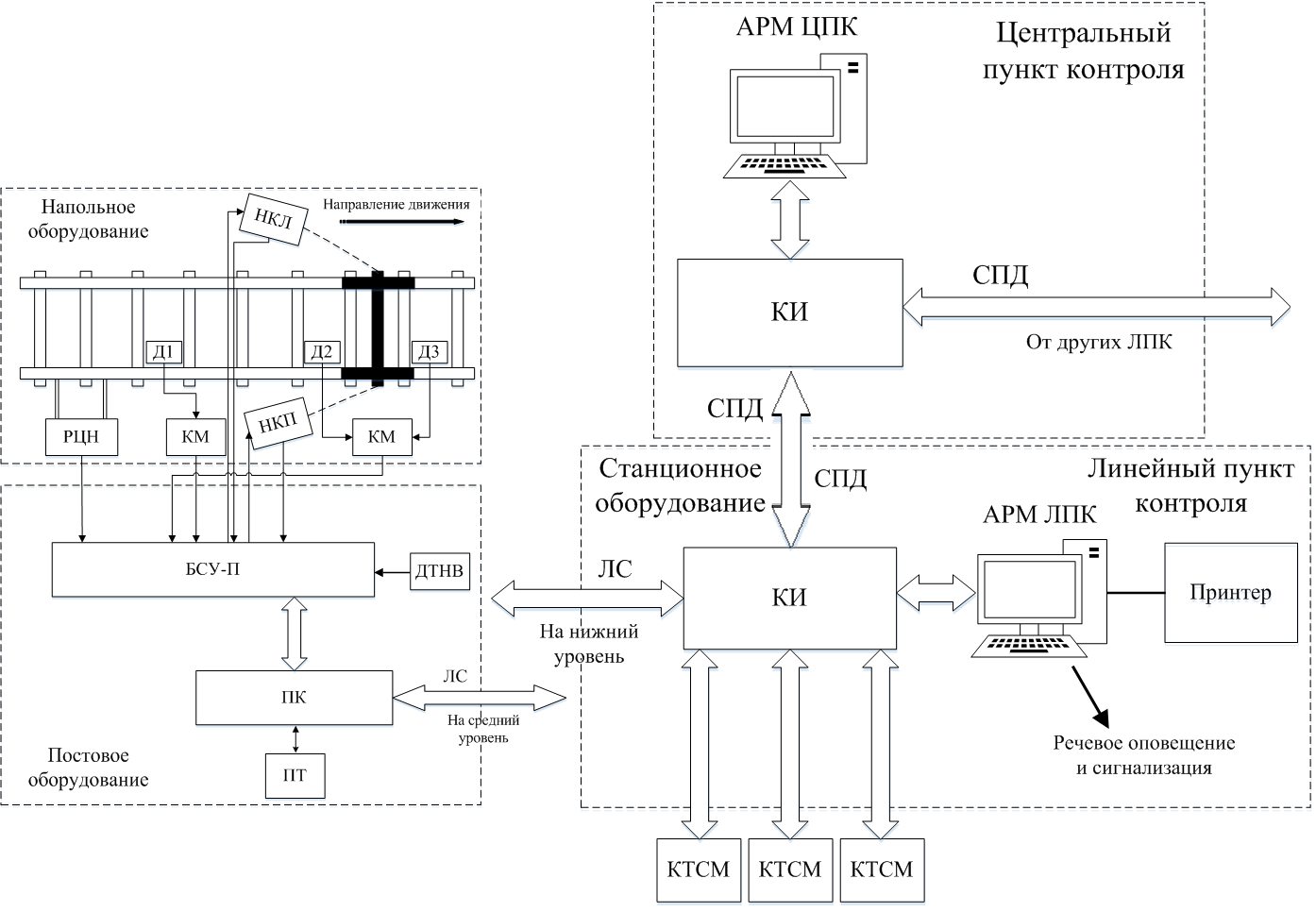
49. КТСМ. Назначение, организационная структура обмена информацией.
Система КТСМ предназначена для автоматизированного контроля исправности буксовых узлов вагонов и локомотивов в составе поезда, а также подсчета общего количества его осей и вагонов, проводимого непосредственно во время его эксплуатационной деятельности (т.е. проезду подвижного состава по рельсовому пути). За счет слежения за нагревом буксового узла, комплекс позволяет на ранней стадии предотвращать излом шеек осей колесных пар и проводить своевременную отцепку неисправных вагонов на участке безостановочного движения с последующим ремонтом.
Функционирование КТСМ повышает безопасность движения поездов и увеличивает пропускную способность на участке его работы.
50. САУТ. Модификации, основное назначение, принцип работы.
Комплекс аппаратуры САУТ обеспечивает ограничение скорости движения поезда в зависимости от показания локомотивного светофора, расстояния до конца блок-участка, допустимых скоростей движения и приведённого (среднего) уклона. Информация о блок-участке или маршруте приёма на станцию передаётся на локомотив путевыми устройствами или берётся из локомотивной базы данных. Скорость ограничивается путём автоматического отключения тяги и включения тормозов поезда в режиме служебного торможения.
САУТ-У
Построен на цифровых и аналоговых элементах, без использования микропроцессоров. Длины блок-участков, ограничения скорости, уклоны задаются путевыми устройствами САУТ-У, расположенными у каждого проходного, входного, маршрутного светофора и на выходе со станции.
САУТ-МП
Построен на базе микропроцессоров Intel 8085. Каждый сигнал между блоками системы передаётся по отдельному проводу. Используются путевые устройства САУТ-У. Часть блоков системы САУТ-УМ перешла в САУТ-МП в неизменном виде.
САУТ-Ц
Представляет собой аппаратуру САУТ-МП с добавлением локомотивного блока путевых параметров ЛБПП. Локомотивный блок путевых параметров включает в себя блок электроники БЭ-ЛБПП, в котором хранится база данных с информацией о перегонах и динамик Д-ЛБПП для выдачи речевых сообщений при смене огней и при приближении к опасным местам и станциям.
Путевое устройство на выходе со станции передаёт локомотивной аппаратуре числовой код перегона. Длина шлейфа этого устройства задаёт расстояние до первого проходного светофора и воспринимается блоком электроники БЭ-САУТ-МП, код перегона воспринимается блоком электроники БЭ-ЛБПП. При проследовании проходных светофоров локомотивный блок путевых параметров имитирует путевые устройства САУТ-У путём выдачи соответствующих сигналов во входные цепи системы САУТ-МП. Длина блок-участка, ограничение скорости на нём и уклон берётся из локомотивной базы данных.
Путевые устройства САУТ-Ц устанавливаются только у предвходного (последнего проходного), входного, маршрутного светофора и на выходе со станции. Внедрение аппаратуры САУТ-Ц позволило сократить количество путевых устройств в 3-4 раза.
После появления аппаратуры САУТ-ЦМ, новая версия программного обеспечения позволила аппаратуре САУТ-Ц работать по единому с ней алгоритму. Обрабатывается информация с путевых устройств САУТ-ЦМ, в базе данных хранится информация о станциях и перегонах, включая первый блок-участок.
САУТ-Ц/485.
Построен на базе микроконтроллеров Siemens SAF-C515C-LM и Atmel AT90S4433-8AI, AT89C51. Представляет собой комплект для замены выработавших ресурс электронных блоков САУТ-Ц. Блок БЭ-ЛБПП исключается из состава аппаратуры, производится замена блока электроники БЭ-САУТ-МП на БЭ-САУТ-Ц/485, добавляется коммутатор САУТ-Ц/485. Через коммутатор к системе подключается динамик, а также, при необходимости, блоки САУТ-ЦМ/485, в частности, блок согласования с КЛУБ-У.
САУТ-ЦМ.
В локомотивной базе данных хранится информация не только о перегонах, включая первый блок-участок (при приёме кодированного сигнала длина шлейфа игнорируется), но и о станциях. Код маршрута приёма на станцию передаётся на локомотив предвходным, входным и (при необходимости) маршрутным путевым устройством САУТ-ЦМ, действующим аналогично выходному путевому устройству системы САУТ-Ц. Так же принимается информация и от путевых устройств САУТ-Ц.
САУТ-ЦМ/485.
Построен на базе микропроцессоров Atmel. Функции приёма и обработки различных групп сигналов разнесены по отдельным блокам, которые располагаются вблизи источников сигналов. Связь между блоками осуществляется по интерфейсу RS-485.
Входные сигналы аппаратуры САУТ:
1. Сигналы от аппаратуры АЛСН (КЛУБ):
показание локомотивного светофора;
нажатие рукоятки бдительности РБ;
импульсы кодовых посылок АЛСН (используются для определения момента проследования проходного светофора по смене типа кодового путевого трансмиттера).
2. Импульсы от датчиков пути и скорости ДПС, частота следования которых пропорциональна скорости движения локомотива. Датчики ДПС устанавливаются на буксах различных колёсных пар, для уменьшения ошибок в вычислениях при возникновении юза и боксования.
3. Сигналы от путевых устройств САУТ, принимаемые антенной. Антенна устанавливается на кронштейн приёмной катушки АЛСН.
4. Сигналы от датчиков давления, измеряющих давление в уравнительной магистрали (установлены на приставку электропневматическую или встроены в неё) и в магистрали тормозных цилиндров.
5. Подача напряжения аппаратурой АЛСН на катушку электропневматического клапана автостопа ЭПК.
6. Сигналы цепей управления локомотива: «Тяга» (включён режим тяги), «ЭДТ» (включён режим реостатного или рекуперативного торможения), «ХВП» (установлено направление движения вперёд), «ХНЗ» (установлено направление движения назад).
7. Включение аппаратуры электропневматического торможения ЭПТ.
Выходные сигналы аппаратуры САУТ
1. Отключение тяги. Осуществляется через реле разбора тяги.
2. Команды «Перекрыша» и «Торможение» для системы ЭПТ, при её наличии.
3. Команды «Перекрыша» и «Торможение» для приставки электропневматической. Приставка электропневматическая устанавливается между краном машиниста и редуктором.
4. Снятие напряжения с катушки ЭПК для реализации экстренного торможения.
5. Команда регистрации состояния аппаратуры САУТ скоростемером.
Информация, передаваемая аппаратурой САУТ машинисту
Пульт машиниста ПМ индицирует следующие измеряемые и вычисляемые аппаратурой САУТ величины:
1. фактическая скорость движения;
2. программная (допустимая) скорость движения;
3. «резерв скорости» - разница между программной и фактической скоростями (отображается аппаратурой САУТ-МП вместо фактической и программной скоростей);
4. расстояние до следующего напольного светофора;
5. значение тормозного коэффициента (отображается при нажатии и удержании кнопки на пульте машиниста);
6. индикатор «Запрещение отпуска». При свечении индикатора отпуск тормозов машинистом запрещён.
Кроме того, воспроизводятся динамиком заранее записанные женским голосом речевые сообщения. Сообщения, начинающиеся со слова «Внимание», требуют подтверждения нажатием рукоятки бдительности (РБ).
Управление работой аппаратуры САУТ машинистом
Предусмотрены следующие органы управления работой аппаратуры САУТ машинистом, расположенные на пульте управления ПУ:
1. кнопка «К20» - действует при «КЖ» и «К» показании локомотивного светофора и позволяет в случаях, предусмотренных ПТЭ, проследование запрещающего сигнала и движение при «К» показании локомотивного светофора со скоростью не более 20 км/ч;
2. кнопка «ПОДТЯГ» - действует при «КЖ» и «Б» показании локомотивного светофора и позволяет остановить поезд на более близком расстоянии от запрещающего сигнала, чем позволяет аппаратура САУТ;
3. кнопка «ОТПРАВ» - действует при «Б» показании локомотивного светофора и позволяет отправляться с боковых некодированных путей, а также даёт возможность безостановочного проезда по боковым некодированным путям со скоростью не более 50 км/ч;
4. кнопка «ОС» - отменяет действие ограничения скорости после проследования хвостовым вагоном поезда зоны ограничения. Отмена ограничения необходима в случаях, когда длина поезда меньше значения, используемого при вычислениях аппаратурой САУТ;
5. тумблер «АЛС-САУТ» - в положении «АЛС» отключает выходные сигналы аппаратуры САУТ-ЦМ от цепей локомотива. При этом положении тумблера аппаратура САУТ-ЦМ не производит разбор тяги, торможение и снятие напряжения с катушки ЭПК.
Кроме того, при необходимости устанавливается тумблер выбора алгоритма работы аппаратуры САУТ-ЦМ «Грузовой - Пассажирский» или «Грузовой - Одиночное следование».
Алгоритм работы САУТ
При движении поезда по «З» показанию локомотивного светофора аппаратура САУТ контролирует максимально допустимую (перегонную или конструкционную) скорость движения. При достижении максимально допустимой скорости разбирается режим тяги, а при её превышении на 2 км/ч производится служебное торможение.
При движении поезда по «Ж» показанию локомотивного светофора к проходному светофору с жёлтым огнём или к входному светофору с одним жёлтым огнём аппаратура САУТ в начале блок-участка контролирует максимально допустимую скорость движения, а на расстоянии тормозного пути до светофора с красным показанием (в конце следующего блок-участка) разбирает режим тяги и производит служебное торможение.