ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 12.12.2023
Просмотров: 210
Скачиваний: 3
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
СОДЕРЖАНИЕ
Механическая система электропривода подъема
Проверка правильности выбора преобразователя
Исследование частoтно-регулируемого асинхронного электропривода крана со скалярном управлением
Разработка и исследование систем электропривода с векторным управлением
Финансовый менеджмент, ресурсоэффективность и ресурсосбережение
моделей осуществляется путем исключения датчиков потока и скорости вращения двигателя и реализации позиционных и следящих систем электропривода.
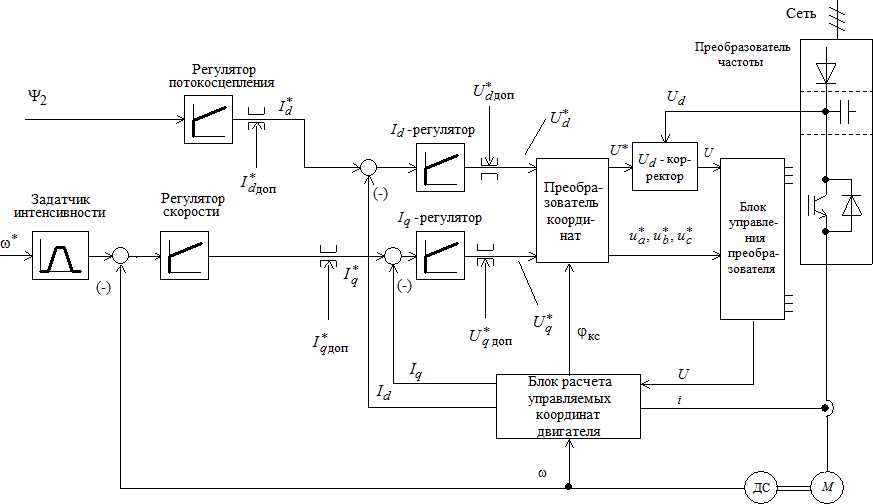
Рисунок 23 – Функциональная схема асинхронного электропривода с частотным векторным управлением и моделью трехфазного инвертора напряжения с ШИМ с датчиком скорости без датчика потока.
В моделях асинхронного электропривода с частотным векторным управлением используются следующие модели асинхронного электродвигателя:
-
двухфазного асинхронного электродвигателя с короткозамкнутым ротором во вращающейся системе координат d, q, ориентированной по результирующему вектору потокосцепления ротора, структурная схема которого представлена на рисунке 25 (полная схема) и рисунке 26 (упрощенная схема); -
двухфазного асинхронного электродвигателя с короткозамкнутым ротором в неподвижной системе координат статора , (рисунке 27) -
трехфазного асинхронного электродвигателя с короткозамкнутым ротором
в неподвижной системе координат статора
a,b,c
(рисунке 28);
 Рисунок 24 – Структурная схема асинхронного электродвигателя с короткозамкнутым ротором во вращающейся системе координат d, q, ориентированной по результирующему вектору потокосцепления ротора
Рисунок 24 – Структурная схема асинхронного электродвигателя с короткозамкнутым ротором во вращающейся системе координат d, q, ориентированной по результирующему вектору потокосцепления ротора
 U1d
U1d U1q
U1q
Рисунок 25 – Структурная схема двухфазного асинхронного электродвигателя во вращающейся системе координат d, q, ориентированной по результирующему вектору потокосцепления ротора, с компенсированными внутренними
обратными связям
 Рисунок 26 – Структурная схема нелинейной непрерывной САУ частотно-регулируемого асинхронного электропривода при векторном управлении с точной моделью двухфазного асинхронного двигателя
Рисунок 26 – Структурная схема нелинейной непрерывной САУ частотно-регулируемого асинхронного электропривода при векторном управлении с точной моделью двухфазного асинхронного двигателя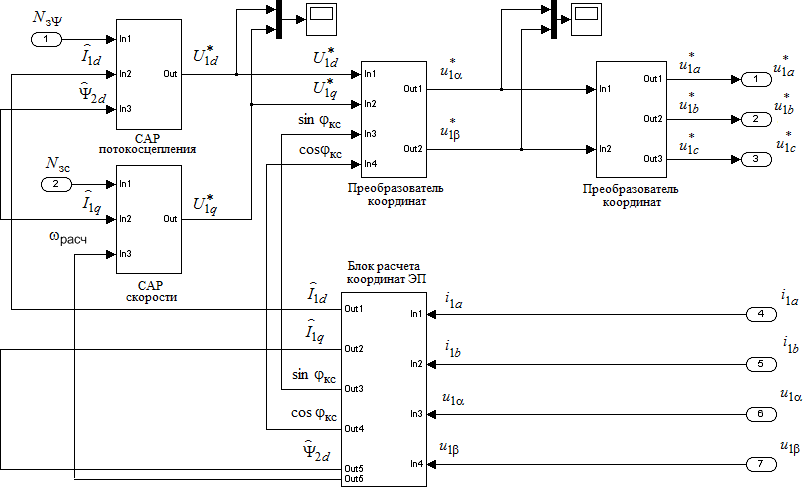
Рисунок 27 – Имитационная модель блока расчета управлений и преобразования координат системы векторного управления регулируемого асинхронного электропривода
Структурные схемы блоков преобразования координат двигателя
Поскольку управления трехфазным асинхронным двигателем формируется в двухфазной системе координат, в моделях электропривода используются блоки прямого и обратного преобразования координат двигателя. Схемы моделей блоков преобразователей координат приведены на рисунок 28 и 29. Для преобразования не указанных на приведенных схемах координат двигателя блоки идентичные.
U1d
i1
 б
бРисунок 28 − Имитационные модели преобразователей координат:
а – из вращающейся системы координат d, q в неподвижную систему
, ;
б – из неподвижной системы координат
,
во вращающуюся систему d, q
u
u
* *
1 1a
i1a
 i1
i1)
)
а б
Рисунок 29 − Имитационные модели преобразователей координат:
а – из неподвижной двухфазной координатной системы, в неподвижную
трехфазную систему координат a, b, c; б – из неподвижной трехфазной системы координат a, b, c в неподвижную двухфазную координатную
систему ,
Структурные схемы ПИ-регуляторов
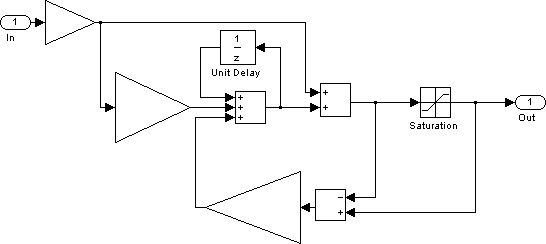
Схема набора имитационной модели ПИ-регулятора с неуправляемым значением уровня ограничения интегральной составляющей выходного сигнала в режиме насыщения приведена на рисунке 30.
 Nвх.i
Nвх.ikрег
п N
i
N
N
и
i
рег.доп
Nрег.i
1
Tрег p
Рисунок 30-Схема набора имитационной модели ПИ-регулятора с отключением интегральной составляющей сигнала при насыщении
Схема набора имитационной модели ПИ-регулятора с управляемым значением уровня ограничения интегральной составляющей выходного сигнала в режиме насыщения приведена на рисунке 31.
 Nвх.i
Nвх.ikрег
п
N
i
tTрег
и
N
i1
Nрег.доп
N
и
i
Nрег.i
kкор t
Tрег
Рисунок 31- Схема набора имитационной модели ПИ-регулятора с регулируемым значением интегральной составляющей сигнала в режиме насыщения
Для ограничения выходного сигнала регулятора скорости в зависимости от фактического значения сигнала регулятора потокосцепления используется модель ПИ-регулятора скорости, приведенная на рисунке 32.
Для ограничения выходного сигнала регулятора тока Iqв
зависимости от фактического значения сигнала регулятора тока Id
используется модель ПИ-регулятора тока, приведенная на рисунке. 33. Для компенсации влияние ЭДС вращения, наводимой в статоре потокосцеплением
ротора, в регуляторе тока Iq
предусмотрена положительная обратная связь по
скорости двигателя с коэффициентом kпос.
Рисунок 32-Имитационная модель ПИ-регулятора скорости с управляемым значением ограничения выходного сигнала
Рисунок 33- Имитационная модель ПИ-регулятора тока
Iqс положительной обратной связью по скорости двигателя и
управляемым значением ограничения выходного сигнала
 2
22d
sin кс
cosкс
2
Рисунок 34-Схема расчета угла поворота вращающейся координатной
системы с использованием значений
измеренных токов i1 , i1
и скорости двигателя
Рисунок 35-Схема расчета угла поворота вращающейся координатной системы с использованием значений токов
i1 ,
i1 , Idи напряжений U1 , U1
- 1 2 3 4 5 6 7 8 9 10 ... 15