Файл: Г.М. Гринфельд лекции по курсу дискретные системы автоматического управления.doc
ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 29.07.2024
Просмотров: 402
Скачиваний: 0
СОДЕРЖАНИЕ
1.1 Типы квантования непрерывных сигналов.
1.2. Решетчатые функции разностные уравнения.
1.3. Обобщенная структурная схема дискретной системы.
1.4. Простейший импульсный элемент. Формирующий элемент. Фиксатор.
2. Основы теории z-преобразования
2.1. Дискретное преобразование Лапласа. Z-преобразование.
2.2. Основные теоремы z-преобразования.
2.3. Передаточная функция разомкнутой дискретной системы.
2.4. Последовательное соединение звеньев в дискретных сау.
2.5. Передаточная функция замкнутой дискретной системы.
2.6. Обратное z-преобразование.
3. Анализ устойчивости и точности
3.1 Прямой метод оценки устойчивости.
3.2 Критерий устойчивости Шур-Кона.
3.3 Критерий устойчивости, использующий билинейное преобразование.
3.4. Абсолютно устойчивые системы.
3.5. Анализ точности дискретных систем.
4. Частотные характеристики дискретных систем
4.1. Теорема Котельникова-Шеннона.
4.2. Логарифмические частотные характеристики дискретных сау.
5. Определение реакции дискретной сау
5.1. Метод дробного квантования.
5.2. Метод модифицированного z-преобразования.
6. Системы автоматического управления
6.2. Передаточные функции цву, реализующего типовые законы управления.
7. Коррекция цифровых систем управления
7.1. Коррекция дискретных сау с помощью непрерывных регуляторов.
7.2. Коррекция сау с помощью цифровых регуляторов.
7.3. Физическая реализуемость цифровых регуляторов.
7.4. Реализация цифровых регуляторов импульсными фильтрами.
7.5. Реализация цифровых регуляторов на базе цву.
8. Методические указания и вариаты расчетно-графического задания
![]() (22)
(22)
![]() (23)
(23)
где
![]() -
дискретные передаточные функции прямого
канала и разомкнутой системы,
соответственно.
-
дискретные передаточные функции прямого
канала и разомкнутой системы,
соответственно.
Для системы, рассматриваемой в данном примере:
![]() ,
,
Следовательно,


2.6. Обратное z-преобразование.
Определив
дискретные передаточные функции
![]() и
и![]() и, знаяZ-изображение
входного сигнала, можно вычислитьZ-изображение выходного
сигнала или сигнала ошибки:
и, знаяZ-изображение
входного сигнала, можно вычислитьZ-изображение выходного
сигнала или сигнала ошибки:
![]() .
.
По
Z-изображениям сигналов
системы могут быть найдены соответствующие
решетчатые функции. Такая операция
представляет собой обратноеZ-преобразование,
символическое обозначение которой -![]() .
.
Не следует
забывать, что получаемая в результате
обратного Z-преобразования
решетчатая функция![]() определяет значения непрерывного
сигнала
определяет значения непрерывного
сигнала![]() только в дискретные моменты времени
только в дискретные моменты времени![]() .
Поэтому для полного описания функции
.
Поэтому для полного описания функции![]() необходимо использовать дополнительную
информацию о поведении системы, либо
применять методы, позволяющие вычислить
величину
необходимо использовать дополнительную
информацию о поведении системы, либо
применять методы, позволяющие вычислить
величину![]() внутри интервалов квантования. К числу
таких методов относятся рассматриваемые
в последующих разделах данного курса
методы дробного квантования и
модифицированногоZ-преобразования.
внутри интервалов квантования. К числу
таких методов относятся рассматриваемые
в последующих разделах данного курса
методы дробного квантования и
модифицированногоZ-преобразования.
По изображению
![]() произвольного вида значения
произвольного вида значения![]() могут быть вычислены путем разложения
могут быть вычислены путем разложения![]() в ряд Лорана (в ряд по убывающим степеням
(z)):
в ряд Лорана (в ряд по убывающим степеням
(z)):
![]() (24)
(24)
Сравнивая приведенный ряд с (12), получим:
![]()
Поскольку
для каждого изображения
![]() в ряд (24) является единственным, оно
может быть осуществлено любым способом,
например по формулам:
в ряд (24) является единственным, оно
может быть осуществлено любым способом,
например по формулам:
![]()
Наиболее
простым приемом нахождения коэффициентов
ряда (24) в случае, когда
![]() представлено в виде дробно-рациональной
функции
представлено в виде дробно-рациональной
функции
 (25)
(25)
является деление
числителя
![]() на знаменатель.
на знаменатель.
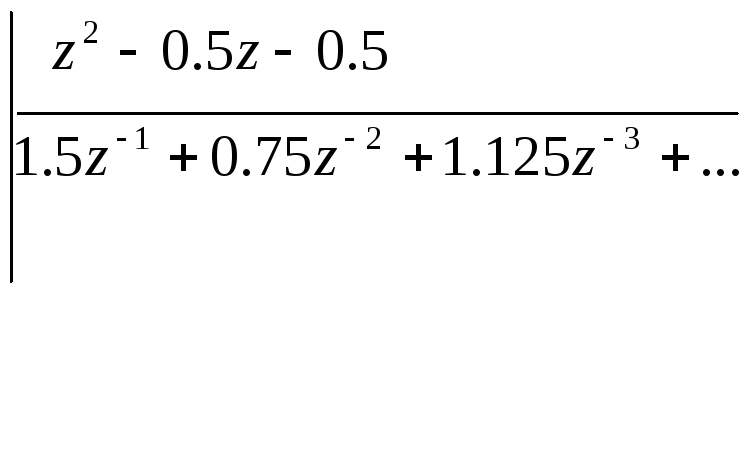
Пример 14.
Необходимо определить решетчатую
переходную функцию
![]() системы с передаточной функцией:
системы с передаточной функцией:
![]()
Z-изображение решетчатой переходной функции:
![]()
В результате
деления полинома, стоящего в числителе
![]() ,
на полином в знаменателе, получим:
,
на полином в знаменателе, получим:
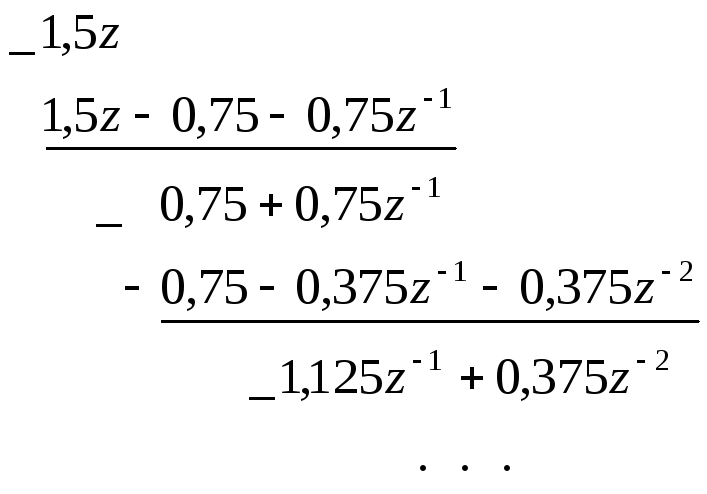
![]()
Коэффициенты
полученного степенного ряда определяют
следующие дискреты
![]() (рис. 21):
(рис. 21):
![]() ;
;![]() ;
;![]()
![]() и т.д.
и т.д.
Использование
любого из предложенных методов расчета
дискрет решетчатой функции не ограничено
какими-либо условиями к виду
![]() ,
но не дает возможности записать выражение
для
,
но не дает возможности записать выражение
для![]() в виде компактной функции натурального
аргумента
в виде компактной функции натурального
аргумента![]() .
.
Такая функция может быть получена на основании формулы обратного Z-преобразования (формулы обращения):
![]() .
.
(26)
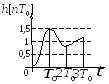
Рис.21. Решетчатая переходная функция
(пример 14)
где замкнутый
контур интегрирования Г на плоскостиZохватывает особые точки![]() .
.
Вычисление
интеграла (26) может быть осуществлено
с использованием формулы Коши в полюсах
![]() :
:
![]()
![]() . (27)
. (27)
Вычет в простом
полюсе
![]() находится по формуле:
находится по формуле:
![]()
![]() , (28)
, (28)
а вычет в полюсе кратности S:
![]()
![]() . (29)
. (29)
Если полюса
изображения (25) простые,
![]() ,
а полином в числителе может быть
представлен в виде
,
а полином в числителе может быть
представлен в виде![]() ,
то (27) преобразуется к виду:
,
то (27) преобразуется к виду:
![]() .
.
Пример 15.
Необходимо определить выражение для
решетчатой функции
![]() ,
если
,
если
![]() .
.
Используя (30), имеем:
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Рассчитанные по полученному выражению значения дискрет, как и следовало ожидать, совпадают с вычисленными в предыдущем примере.
Если все
условия, ограничивающие применение
(30), выполняются, за исключением того,
что полином
![]() не имеет нулевого корня, то искомая
решетчатая функция определяется по
формуле:
не имеет нулевого корня, то искомая
решетчатая функция определяется по
формуле:
![]() ,
,
которую можно
использовать для
![]() .
При этом величину
.
При этом величину![]() следует находить по теореме о начальном
значении.
следует находить по теореме о начальном
значении.
Пример 16. Необходимо определить выражение для решетчатой функции, если
![]() .
.
Начальное значение решетчатой функции равно:
![]() .
.
Для определения предыдущих значений по (31) полагаем:
![]()
![]()
![]()
![]()
![]()
![]()
![]()
В соответствии
с полученным выражением для
![]() имеем:
имеем:
![]() ;
;![]()
![]() и т.д.
и т.д.
Если число
нулей равно числу полюсов (25) (порядок
полиномов
![]() и
и![]() равны),
следует, разделив
равны),
следует, разделив![]() на
на![]() ,
представить
,
представить![]() в виде суммы составляющей нулевого
порядка и дробно-рационального остатка.
При этом первое слагаемое определяет
величину
в виде суммы составляющей нулевого
порядка и дробно-рационального остатка.
При этом первое слагаемое определяет
величину![]() ,
а по второму, используя формулу (31), можно
вычислить искомую решетчатую функцию.
,
а по второму, используя формулу (31), можно
вычислить искомую решетчатую функцию.
Пример 17. Необходимо определить выражение для решетчатой переходной функции разомкнутой дискретной САУ, передаточная функция ПНЧ которой равна:
![]()
Передаточная функция дискретной системы:
![]() .
.
Z– изображение переходной функции:
 .
.
В соответствии с формулой (31) можно записать:
![]()
![]()
![]() ;
;
![]() ;
;![]()
Начальное
значение решетчатой функции:
![]() .
Для
.
Для![]() справедливо:
справедливо:
 .
.