Добавлен: 21.10.2018
Просмотров: 4772
Скачиваний: 13
48
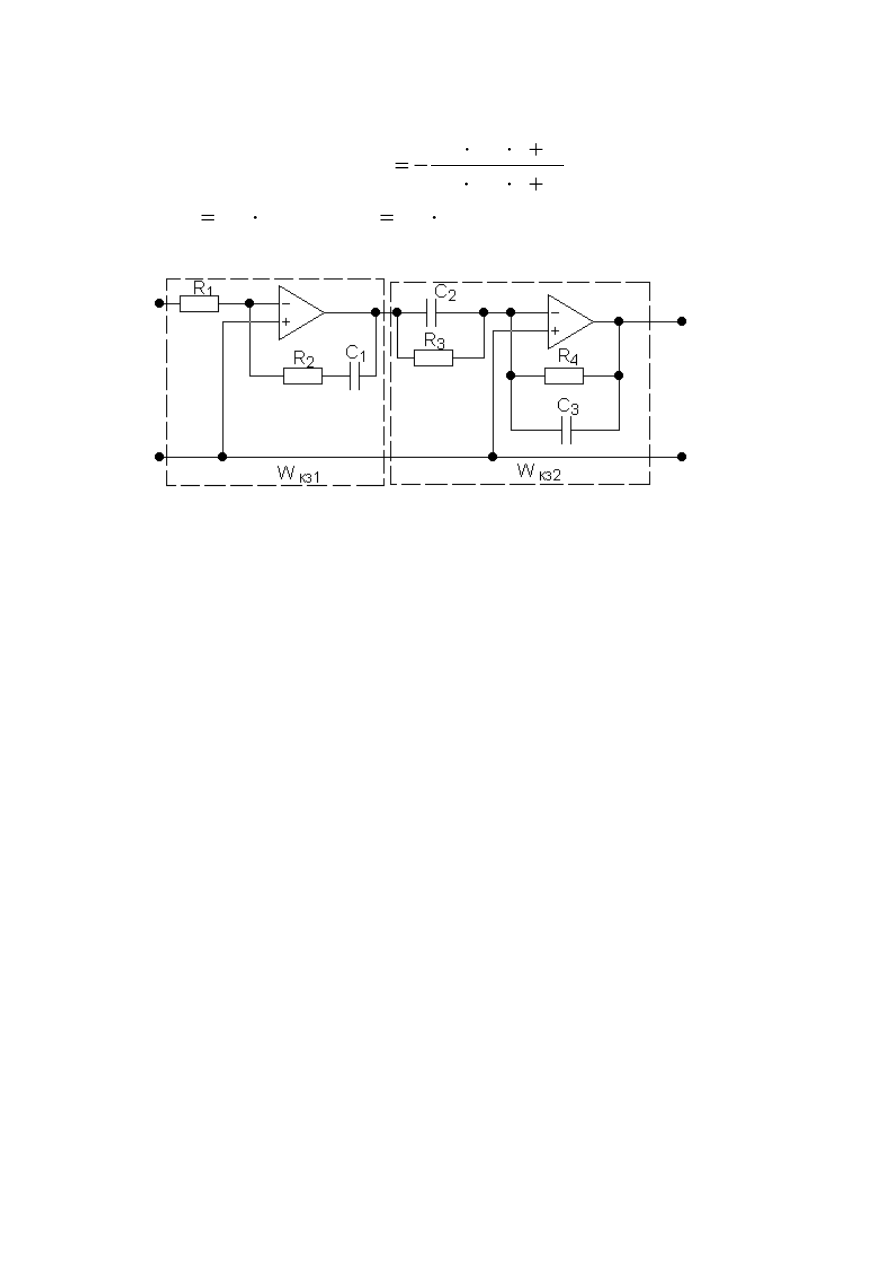
Передаточная функция W
кз2
(s) имеет вид:
;
)
1
s
T
(
R
)
1
s
T
(
R
)
s
(
W
4
3
3
4
2
кз
где
;
C
R
T
2
4
3
.
C
R
T
3
4
4
Рис. 28. Корректирующее устройство
Параметры элементов корректирующего звена должны быть
следующими:
R
1
=29,7 кОм;
R
2
=7 кОм;
R
3
=21 кОм;
R
4
=7 кОм;
C
1
=100 мкФ;
C
2
=100 мкФ;
C
3
=0,023 мкФ
В итоге получили необходимое корректирующее устройство, схема
которого представлена на рис. 28.
49
Основная литература
1. Глухов В. В. Теория автоматического управления. Ч. 1. –М.: МГТУ ГА, 2006.
2. Солодовников В.В., Плотников В.Н., .Яковлев А.В. Основы теории и
элементы систем автоматического регулирования. - М.: Машиностроение, 1985.
- 536 с.
3. Теория автоматического управления.: Учебное пособие. Ч. I, ч. II. /Под ред.
акад. А. А. Воронова. - М: Высш. шк., 1986.
4. Иващенко Н.Н. Автоматическое регулирование. Теория и элементы систем. -
М.: Машиностроение, 1978.- 736 с.
5. Задачник по теории автоматического управления. /Под ред. А.С. Шаталого.-
М.: Энергия, 1977. -340 с.
Дополнительная литература
1. Техническая кибернетика. Теория автоматического регулирования. /Под ред.
В. В. Солодовникова. В 3-х кн. - М.: Машиностроение, 1967.
2. Справочное пособие по теории систем автоматического регулирования и
управления. /Под ред. Е.А. Санковского. - Минск: Высш. шк., 1973.-724 с.
3. Е.П. Попов. Теория линейных систем автоматического регулирования и
управления. - М: Наука, 1989. - 302 с.