Добавлен: 21.10.2018
Просмотров: 3246
Скачиваний: 12

3
СОДЕРЖАНИЕ
ВВЕДЕНИЕ……………………………………………………………………...4
1. ЗАДАНИЯ НА КУРСОВУЮ РАБОТУ………………………………………….5
Вариант 1…………………………………………………………………..5
Вариант 2…………………………………………………………………..7
Вариант 3…………………………………………………………………..8
Вариант 4…………………………………………………………………..9
2. ОСНОВНЫЕ ТЕОРЕТИЧЕСКИЕ ПОЛОЖЕНИЯ СИНТЕЗА
МАТЕМАТИЧЕСКИХ МОДЕЛЕЙ ЭЛЕМЕНТОВ САУ
ПРИ ЗАДАННОЙ ЕЁ СТРУКТУРЕ………………………………………………11
2.1. Основные требования для синтеза элементов САУ………………11
2.2. Передаточные функции САУ………………………………………12
2.3.Статическая точность САУ при произвольных и типовых
воздействиях……………………………………………..……………….14
2.4. Обоснование построения желаемой ЛАЧХ………………………..16
2.5. Порядок построения желаемой ЛАЧХ……………………………..20
2.6. Синтез корректирующих звеньев…………………………………..22
2.7. Построение переходного процесса…………………………………26
3. ПРИМЕР РАСЧЕТА ЗАДАНИЯ ПО КУРСОВОЙ РАБОТЕ
ГРАФОАНАЛИТИЧЕСКИМ МЕТОДОМ………………………………………..31
3.1. Задание на курсовую работу………………………………………..31
3.2. Типовой графоаналитический расчет по курсовой работе……….32
3.2.1. Построение желаемой ЛАЧХ………………………………….33
3.2.2. Синтез передаточной функции корректирующего звена……35
3.2.3. Построение переходного процесса……………………………36
4. ПРИМЕР РАСЧЕТА ЗАДАНИЯ ПО КУРСОВОЙ РАБОТЕ
С ИСПОЛЬЗОВАНИЕМ СИСТЕМЫ Mathcad…………………………………...39
4.1. Задание на курсовую работу………………………………………..39
4.2. Типовой расчет по курсовой работе с использованием системы
Mathcad……………………………………………………………………40
4.2.1. Построение ЛАЧХ неизменяемой части системы…………...40
4.2.2. Построение желаемой ЛАЧХ………………………………….43
4.2.3. Синтез передаточной функции корректирующего звена……45
4.2.4. Построение переходного процесса……………………………46
4.2.5. Синтез корректирующего звена из R, L, C элементов………47

4
ВВЕДЕНИЕ
Дисциплине "Моделирование систем и процессов" принадлежит основная
роль в формировании профессиональных знаний для инженера по эксплуатации
авиационного оборудования в области автоматики авиационных систем и
комплексов. Целью изучения дисциплины является получение знаний об общих
принципах построения и расчета автоматических систем управления в
авиационной технике, овладение методами анализа и синтеза математических
моделей информационных систем и систем автоматического управления на
основе использования частотных графоаналитических методов и средств
вычислительной техники.
В этой курсовой работе студент должен на основе изучения
соответствующего курса усвоить следующие умения:
- составлять функциональные и структурные схемы систем автоматического
управления, используя основные математические модели их элементов;
- производить статический расчет системы и выбор её параметров,
удовлетворяющих основным требованиям, предъявляемым к САУ;
- определять вид и параметры передаточных функций элементов систем
автоматического управления;
- производить динамический расчет систем автоматического управления на
основе изучения методов анализа и определять качество работы систем;
- выбирать и рассчитывать характеристики элементов систем, используя
частотные методы синтеза САУ;
- производить анализ причин неисправностей и отказов в системах
автоматического управления;
- использовать современную вычислительную технику при исследовании
систем автоматического управления.
Данное пособие имеет следующую структуру.
В первой части пособия представлены четыре задания на курсовую работу.
Каждое задание имеет 20 вариантов. Первые 10 вариантов представлены в
таблицах. У вторых десяти вариантов изменены параметры передаточных
функций элементов. Эти изменения представлены в записях после таблиц.
Во второй части пособия изложены основные теоретические положения
синтеза САУ при заданной её структуре, что позволяет студенту-заочнику
выполнить задание, практически не обращаясь к другим источникам.
В третьей и четвертой частях пособия представлены примеры решения
поставленной задачи на основе инженерных графоаналитических методов и в
системе компьютерной математики Mathcad, что поможет студенту выполнить
все требования по оформлению и расчетам к данной работе.
5
1. ЗАДАНИЯ НА КУРСОВУЮ РАБОТУ
.
Вариант и номер задания студентам дневного факультета преподаватель
выдает индивидуально каждому студенту на семинарах по курсовому
проектированию, где проводятся консультации по курсовой работе и
рассматриваются типовые примеры расчетов.
Вариант задания для студентов заочного факультета выбирается по номеру
группы, который соответствует номеру варианта, а последняя цифра номера
зачетки определяет номер задания в выбранном варианте.
Вариант 1
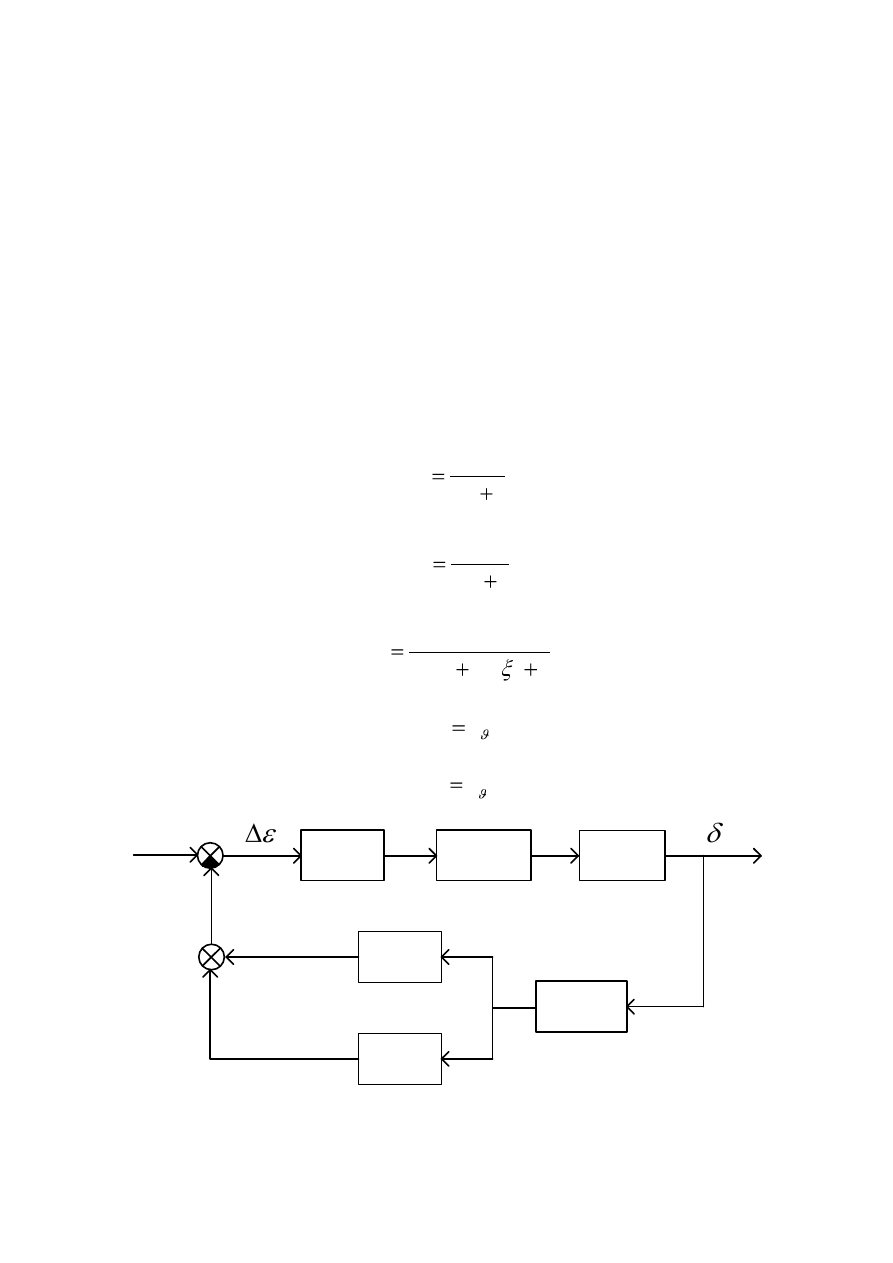
Задана структурная схема автоматической системы управления ЛА в
режиме стабилизации и управления углом тангажа (рис. 1).
Передаточные функции блоков схемы:
1
)
(
1
1
1
s
T
k
s
W
;
1
)
(
2
2
2
s
T
k
s
W
;
1
2
)
(
3
2
2
3
3
3
s
T
s
T
k
s
W
;
k
s
W
)
(
4
;
s
k
s
W
)
(
5
W
1
(s)
W
кз
(s)
W
2
(s)
W
4
(s)
W
5
(s)
W
3
(s)
V
V
В
ЗАД
V
Рис.1. Структурная схема системы «ЛА-САУ»
6
Определить передаточную функцию корректирующего звена
)
(s
W
КЗ
так,
чтобы система «ЛА-САУ» обладала следующими свойствами и показателями
качества:
- астатизмом 1-го порядка;
- передаточным коэффициентом разомкнутой системы
1
10 c
k
;
- перерегулированием
%
30
max
;
- временем переходного процесса
с
t
р
5
,
2
.
Максимальное ускорение регулируемой величины должно быть не более
2
10
с
рад
при начальном рассогласовании
рад
1
,
0
.
Построить переходной процесс скорректированной системы и показать,
что система «ЛА-САУ» удовлетворяет заданным требованиям.
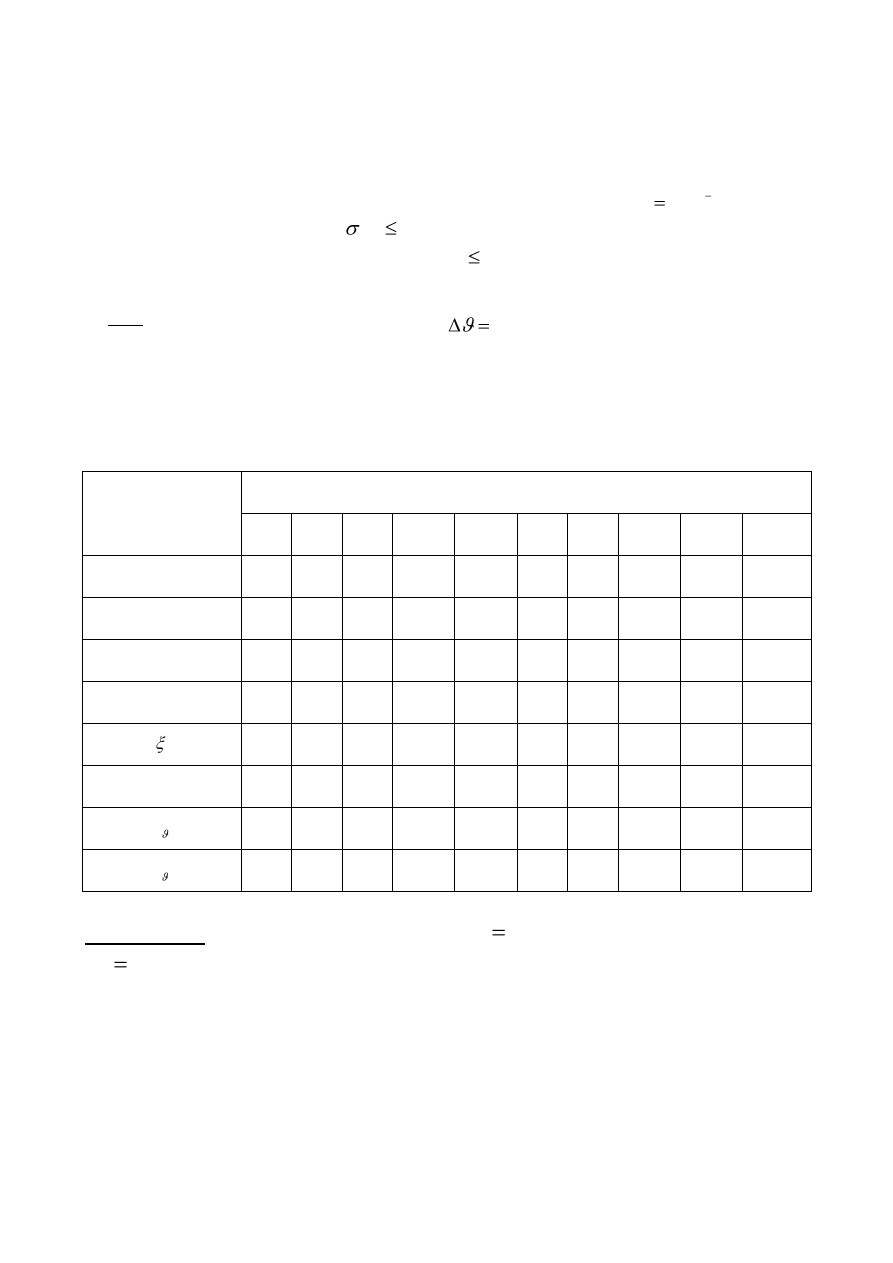
Варианты значений параметров системы «ЛА-САУ» заданы в табл. 1.
Таблица 1
ПАРАМЕТРЫ
НОМЕРА ЗАДАНИЙ
1
2
3
4
5
6
7
8
9
10
с
T
,
1
0,08 0,08 0,07 0,06
0,06
0,06 0,05 0,05
0,04
0,04
1
k
20
30
30
40
40
45
45
50
50
55
с
T
,
2
0,02 0,03 0,03 0,035 0,035 0,04 0,04 0,025 0,025 0,015.
с
T
,
3
0,6 0,6 0,65 0,65
0,7
0,7 0,8 0,8
0,9
0,9
0,5 0,5 0,5 0,5
0,5
0,6 0,6 0,6
0,6
0,6
3
k
0,3 0,3 0,3 0,3
0,3
0,2 0,2 0,2
0,2
0,2
k
3
3
3
3
3
3
3
3
3
3
k
5
5
5
5
5
5
5
5
5
5
Примечание: в первых 10 вариантах
5
,
0
2
k
, во вторых 10 вариантах -
8
,
0
2
k
.
На основе полученного вида
)
(s
W
КЗ
синтезировать корректирующее звено
из R,L,C элементов.
7
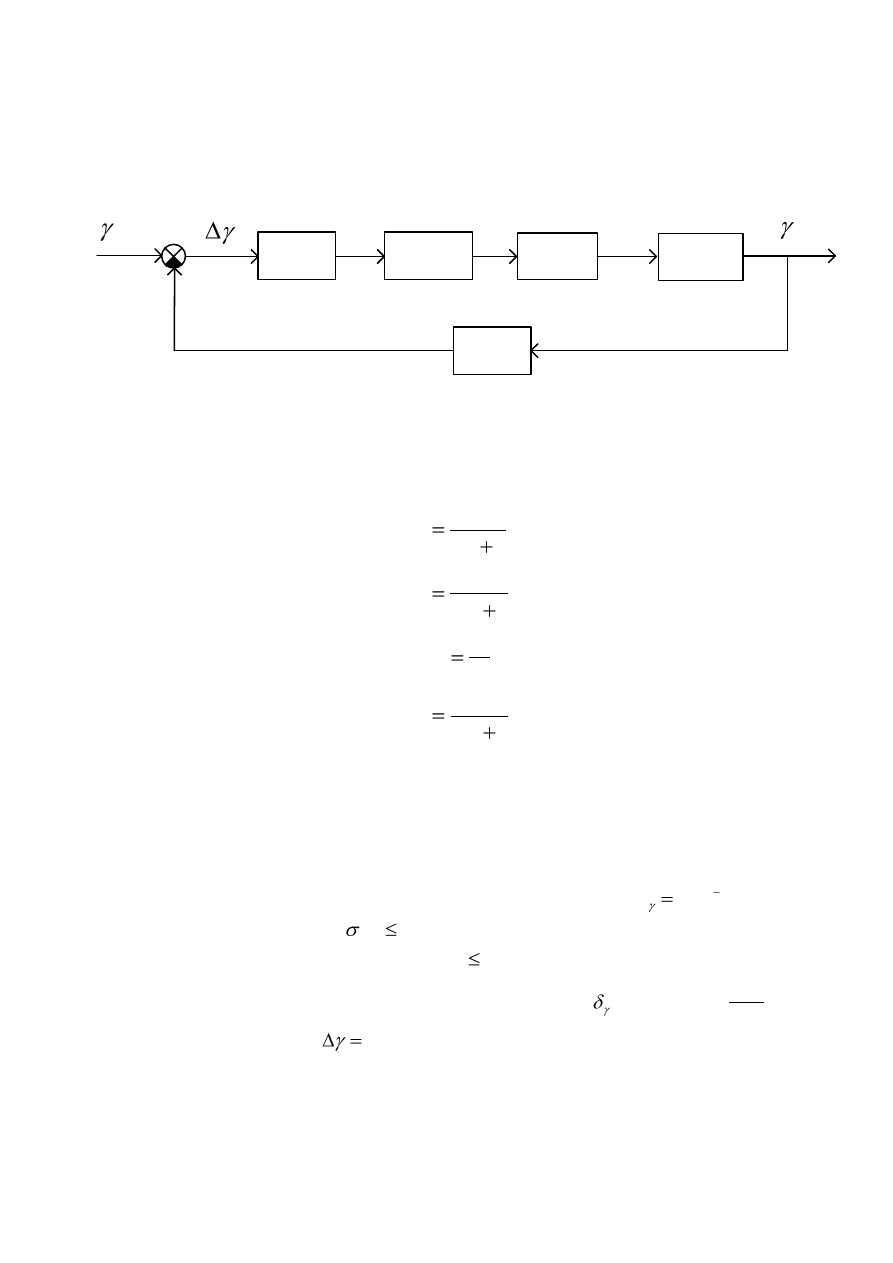
Вариант 2
Задана структурная схема автоматической системы стабилизации крена ЛА
(рис.2).
W
1
(s)
W
кз
(s)
W
2
(s)
W
4
(s)
W
3
(s)
ЗАД
Рис. 2. Структурная схема автоматической системы стабилизации крена
Передаточные функции блоков схемы:
1
)
(
1
1
1
s
T
k
s
W
;
1
)
(
2
2
2
s
T
k
s
W
;
S
k
s
W
3
3
)
(
;
1
)
(
4
4
4
s
T
k
s
W
.
Определить передаточную функцию корректирующего звена
)
(s
W
КЗ
и
определить
3
k
в
)
(
3
s
W
так, чтобы система обладала следующими свойствами и
показателями качества:
- астатизмом 1-го порядка;
- передаточным коэффициентом разомкнутой системы
1
15 с
k
;
- перерегулированием
%
20
max
;
- временем переходного процесса
с
t
р
5
,
1
.
Максимальное ускорение регулируемой величины
не более
2
20
с
рад
при
наличии рассогласования
рад
2
,
0
.
Необходимо построить переходной процесс скорректированной системы и
показать, что система удовлетворяет заданным требованиям.
Варианты значений параметров заданы в табл. 2.