Добавлен: 21.10.2018
Просмотров: 4754
Скачиваний: 13
8
Таблица 2
ПАРАМЕТРЫ
НОМЕРА ЗАДАНИЙ
1
2
3
4
5
6
7
8
9
10
1
k
2
2
2
2
2
1
1
1
1
1
2
k
100
110
120
130
140
150
160
170
180
190
4
k
0,4
0,45 0,35 0,3
0,35 0,4
0,45 0,2
0,25 0,3
с
T
,
2
0,1
0,12 0,16 0,18 0,2
0,22 0,2
0,18 0,16 0,14
с
T
,
4
0,9
0,8
0,7
0,6
0,5
0,6
0,7
0,8
0,9
1
Примечание: в первых 10 вариантах
с
T
0,01
1
, во вторых 10 вариантах -
с
T
0,02
1
.
На основе полученного вида
)
(s
W
КЗ
синтезировать корректирующее звено
из R,L,C элементов.
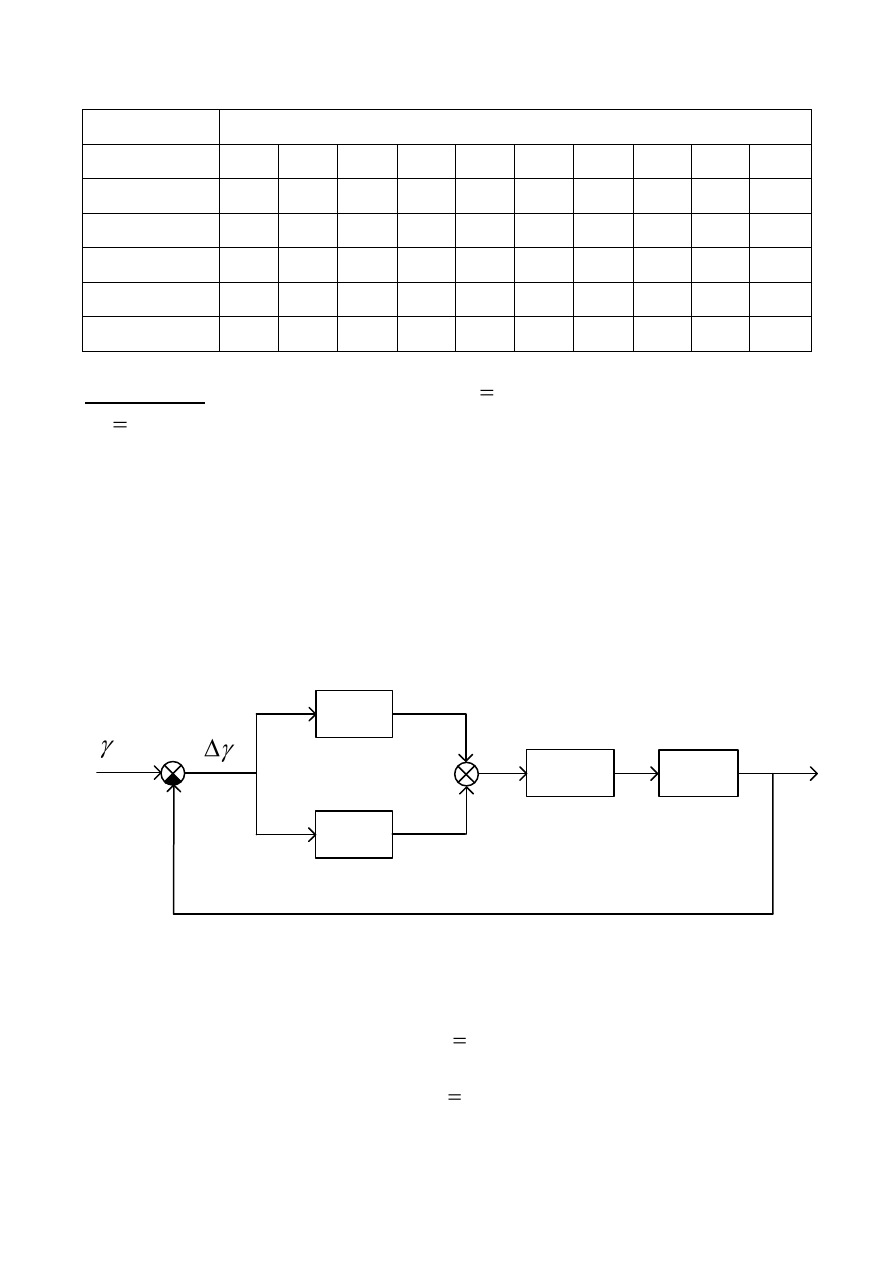
Вариант 3
Задана структурная схема стабилизации гироскопического устройства
(рис.3).
W
1
(s)
W
кз
(s)
W
3
(s)
W
2
(s)
)
(t
Y
ЗАД
Рис.3. Структурная схема стабилизации гироскопического устройства
Передаточные функции блоков схемы:
1
1
)
(
k
s
W
;
s
k
s
W
2
2
)
(
;
9
)
1
2
(
)
(
3
2
2
3
3
3
s
T
s
T
s
k
s
W
.
Синтезировать передаточную функцию корректирующего звена
)
(s
W
КЗ
и
определить
2
k в
)
(
2
s
W
так, чтобы система стабилизации гироскопического
устройства обладала следующими свойствами и показателями качества:
- ошибкой стабилизации
01
,
0
;
- перерегулированием
%
20
max
;
- временем переходного процесса
с
t
р
2
,
0
1
,
0
.
Максимальное ускорение регулируемой величины не более
2
50
с
рад
при
начальном рассогласовании
рад
2
,
0
.
Построить переходной процесс скорректированной системы стабилизации
и показать, что система удовлетворяет заданным требованиям.
Варианты заданий параметров системы заданы в табл 3.
Таблица 3
ПАРАМЕТРЫ
НОМЕРА ЗАДАНИЙ
1
2
3
4
5
6
7
8
9
10
1
k
0,5
0,55 0,6
0,65 0,7
0,75 0,8
0,85 0,9
0,95
2
k
1,2
1,4
1,6
1,8
2
1,2
1,4
1,6
1,8
2
3
k
10
12
14
16
18
20
22
24
26
28
с
T
,
3
1
1
1
1
1
1,2
1,2
1,2
1,2
1,2
Примечание: в
)
(
3
s
W
для первых 10 вариантов
8
,
0
, для вторых 10 ва-
риантов
5
,
0
.
На основе полученной
)
(s
W
КЗ
синтезировать электрическую схему
корректирующего звена из R,L,C элементов.
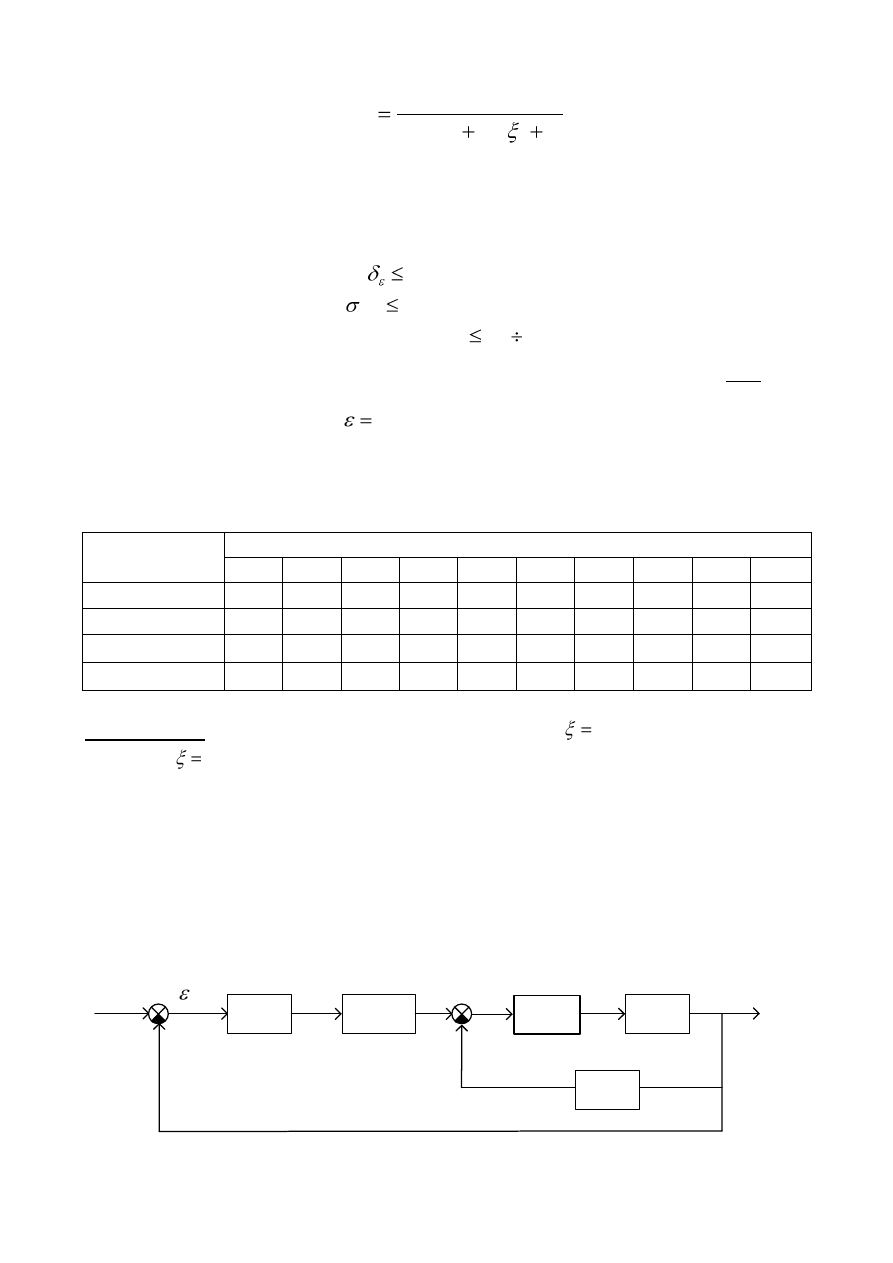
Вариант 4
Задана структурная схема следящей системы авиационного привода
(рис.4).
W
1
(s)
W
кз
(s)
W
2
(s)
W
3
(s)
)
(t
Y
ЗАД
X
)
(t
W
4
(s)
Рис. 4. Структурная схема следящей системы авиационного привода

10
Передаточные функции блоков схемы:
1
)
(
1
1
1
s
T
k
s
W
;
1
)
(
2
2
2
s
T
k
s
W
;
S
k
s
W
3
3
)
(
;
1
)
(
4
4
4
s
T
k
s
W
.
Синтезировать передаточную функцию корректирующего звена
)
(s
W
КЗ
и
определить
3
k
в
)
(
3
s
W
так, чтобы система обладала следующими показателями
качества:
- перерегулированием
%
25
max
;
- временем переходного процесса
с
T
5
,
0
max
;
- ошибкой слежения при
t
t
x
2
)
(
, равной
с
рад
01
,
0
.
Максимальное ускорение регулируемой величины
)
(t
Y
не более
2
с
рад
10
при начальном рассогласовании
рад
2
,
0
.
Построить переходной процесс скорректированной системы и показать,
что система удовлетворяет заданным требованиям.
Варианты заданий параметров системы заданы в табл. 4.
Таблица 4
ПАРАМЕТРЫ
НОМЕРА ЗАДАНИЙ
1
2
3
4
5
6
7
8
9
10
1
k
300 350
400 450
500 600
500 450
400 350
2
k
1
1,2
1,3
0,9
1,5
1,6
0,7
0,8
0,9
1,2
3
k
1
1,1
1
0,9
1
1,1
0,9
1
1,1
0,9
4
k
10
20
30
10
20
30
10
20
30
10
с
T
,
3
0,2
0,25 0,3
0,35 0,4
0,45 0,5
0,55 0,6
0,65
Примечание: для первых 10 вариантов
с
T
05
,
0
1
,
с
T
1
,
0
2
, для вторых
10 вариантов
с
T
05
,
0
1
,
с
T
2
,
0
2
.
На основе полученной
)
(s
W
КЗ
синтезировать схему корректирующего
звена из R, L, C элементов.
11
2. ОСНОВНЫЕ ТЕОРЕТИЧЕСКИЕ ПОЛОЖЕНИЯ СИНТЕЗА
МАТЕМАТИЧЕСКИХ МОДЕЛЕЙ ЭЛЕМЕНТОВ САУ
ПРИ ЗАДАННОЙ ЕЁ СТРУКТУРЕ
2.1. Основные требования для синтеза элементов САУ
Общая задача синтеза и проектирования САУ заключается в выборе её
структурной схемы и определении параметров и характеристик элементов,
которые
обеспечивают
требуемые
статические,
динамические
и
эксплуатационные качества.
При синтезе САУ с заданной структурой предполагают, что в неё входят
объект управления и элементы с постоянными параметрами, которые
составляют неизменяемую часть системы.
Тогда задача синтеза состоит в том, что с помощью элементов с
варьируемыми параметрами спроектировать САУ так, чтобы она обладала
требуемыми статическими и динамическими характеристиками. Эти элементы
определяют изменяемую часть системы и их называют корректирующими
устройствами.
Решение задачи синтеза неоднозначно, т. к. одни и те же требования можно
удовлетворить с помощью различных корректирующих устройств. Обычно
предпочтение отдают тем корректирующим устройствам, которые наиболее
легко реализуются в данной системе.
Определение и выбор корректирующих устройств базируется на различных
методах синтеза САУ. Наибольшее распространение получили так называемые
«частотные методы», разработанные В. В. Солодовниковым и основанные на
определении
желаемых
логарифмических
частотных
характеристик
разрабатываемой САУ.
Проектирование САУ в соответствии с заданными требованиями к
динамическим и статическим характеристикам САУ включает следующие
этапы:
- синтез САУ на основе условий физической осуществимости и
рационального выбора её элементов;
-
синтез корректирующих устройств, обеспечивающих заданные
требования показателей качества.
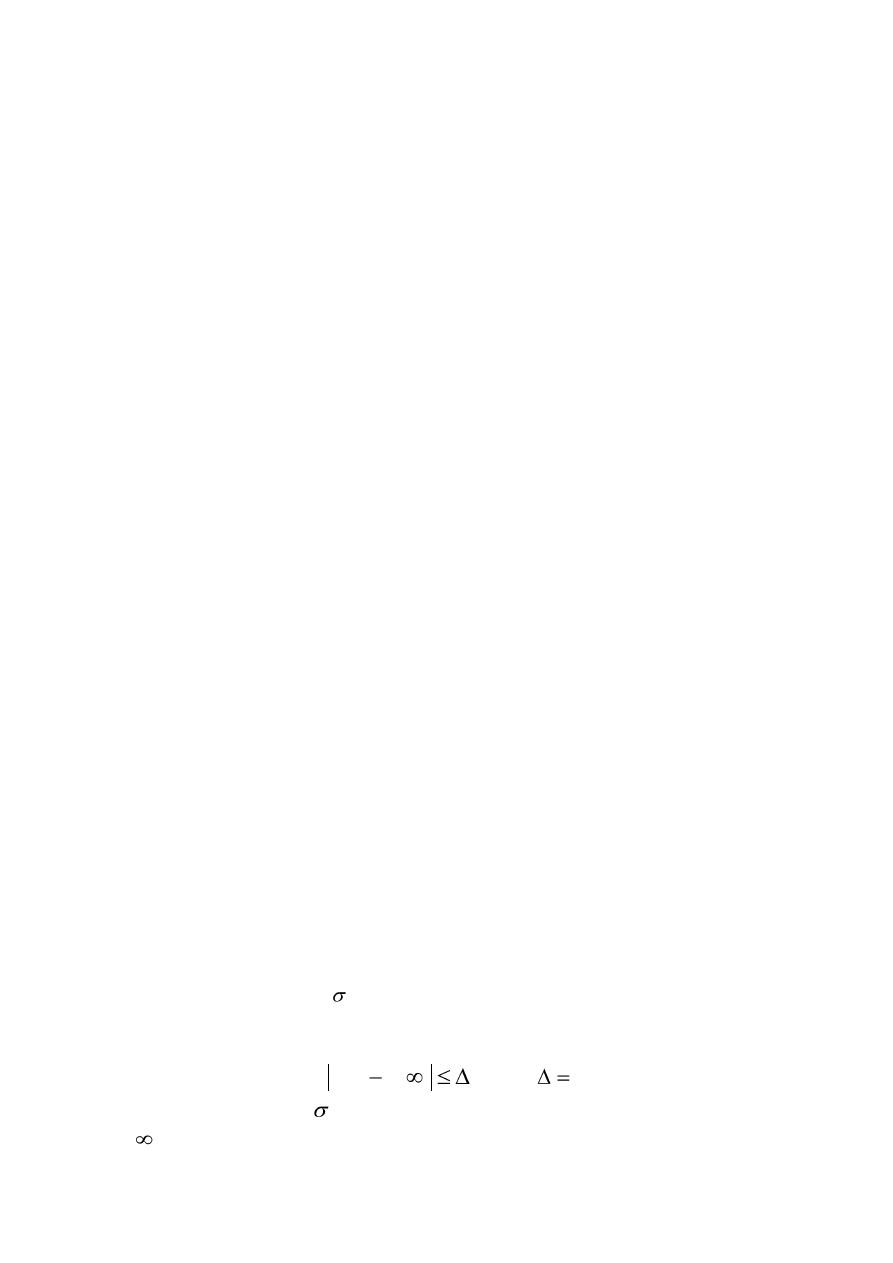
К основным требуемым показателям качества относятся (рис. 5):
- время переходного процесса
P
t
;
- перерегулирование
%
,
при единичном входном воздействии на САУ.
Время переходного процесса определяется минимальным временем, по
истечении которого:
)
(
)
(
y
t
y
, где
05
,
0
.
Перерегулирование
%
,
определяется максимальным отклонением
)
(t
y
от
)
(
y
и пересчитывается в процентах:
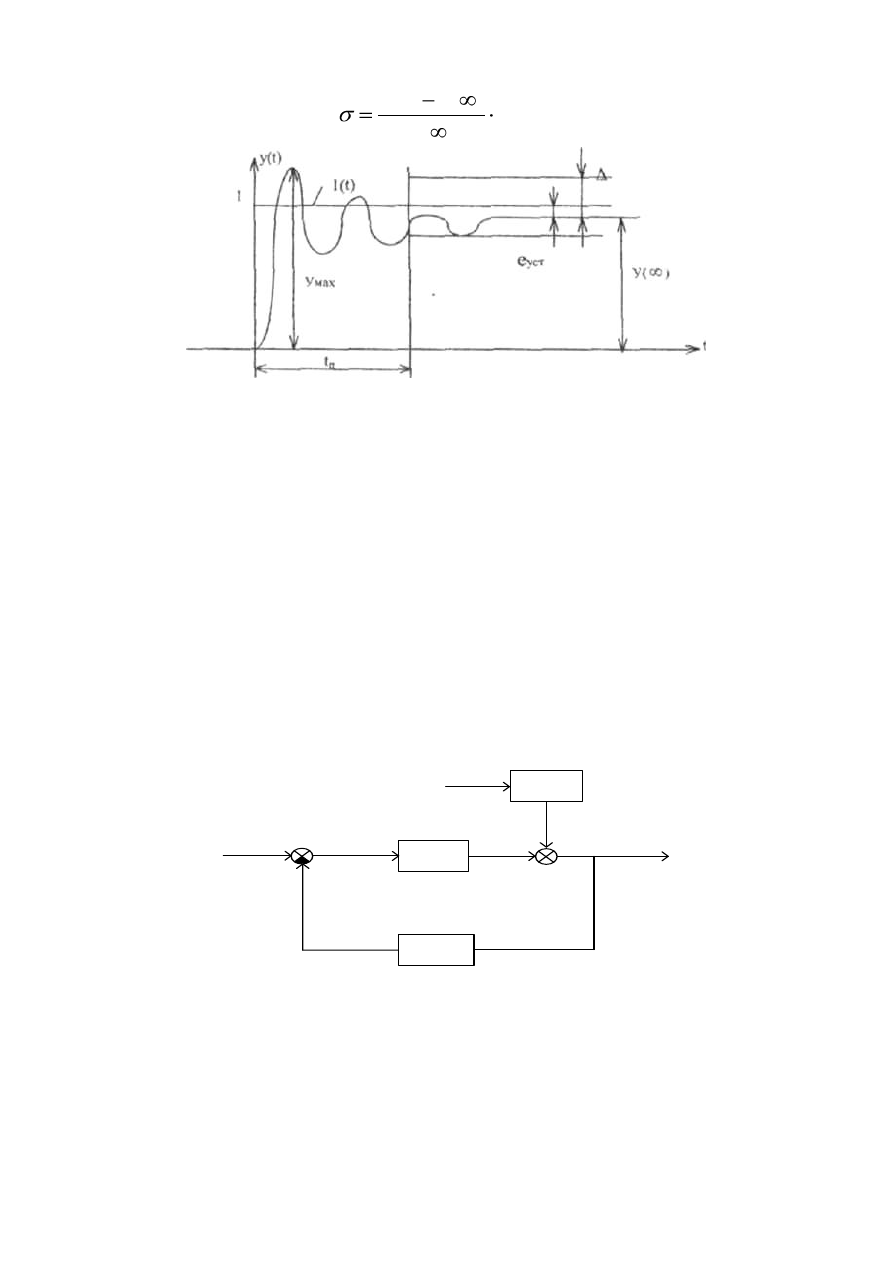
12
%
100
)
(
)
(
max
y
y
y
.
Рис. 5. Общий вид переходного процесса линейной САУ
Эти показатели качества являются определяющими, если для САУ
основным режимом работы будет режим стабилизации. При работе САУ в
режиме слежения за изменением входного сигнала основным требованием
будет являться воспроизведение входного сигнала с заданной точностью. Эти
требования задаются коэффициентами ошибок:
0
С
- определяет ошибку по координате;
1
С
- определяет ошибку по скорости;
2
С - определяет ошибку по ускорению.
Рассмотрим основные положения теории автоматического управления, с
помощью которых производится расчет и выбор как статических, так и
динамических характеристик САУ.
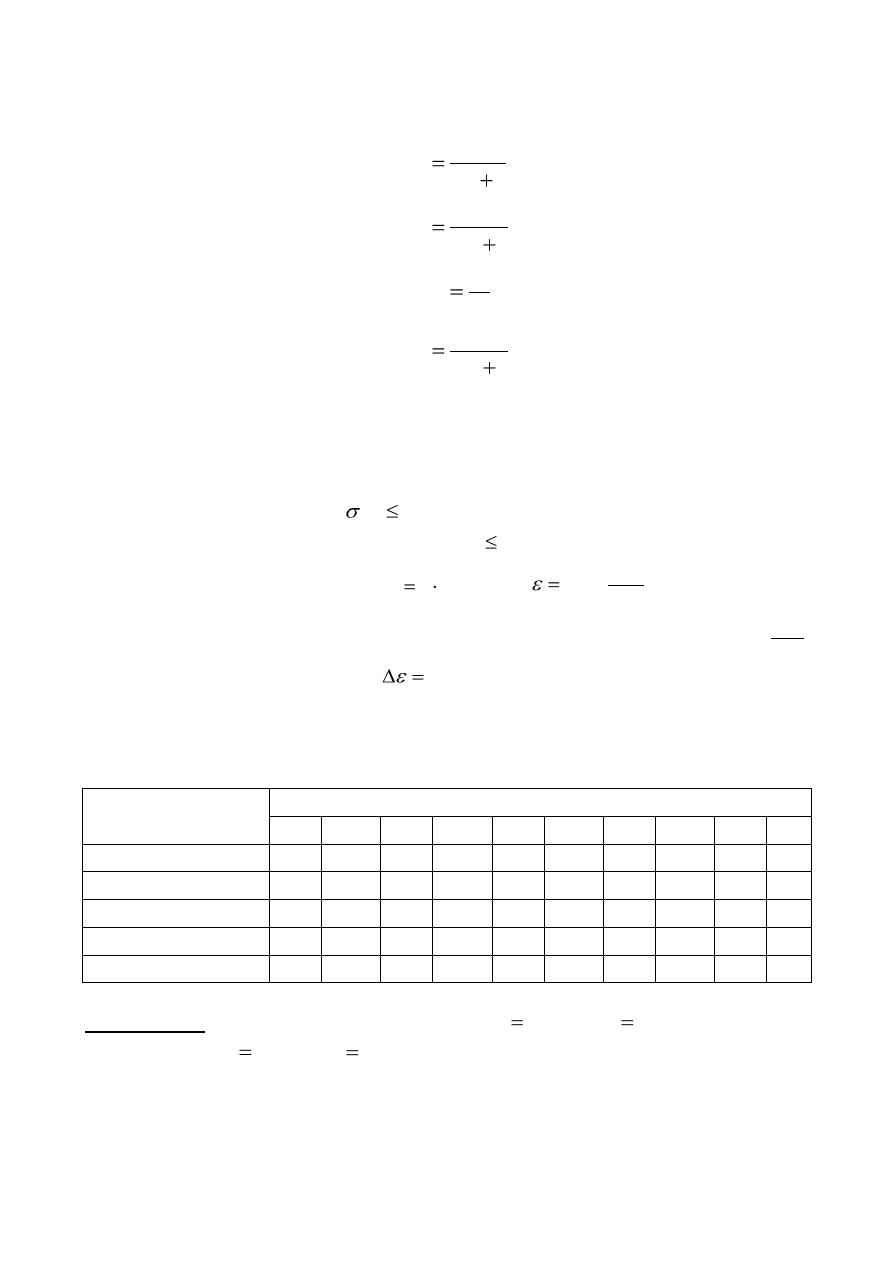
2.2. Передаточные функции САУ
W(s)
W
f
(s)
)
(s
Y
)
(s
X
)
(
e t
W
ос
(s)
)
(t
x
)
(s
E
)
(t
y
)
(s
F
)
(t
f
Рис. 6. Типовая схема САУ
Структурные схемы линейных САУ с помощью эквивалентных
преобразований можно привести к типовой схеме, представленной на рис. 6.
На рис. 6 введены следующие обозначения:
)
(t
x
- управляющее воздействие;