Добавлен: 23.10.2018
Просмотров: 7329
Скачиваний: 22
119
Рисунок 6.2 - Механическая характеристика двигателя постоянного тока
независимого возбуждения
Пуск в ход двигателей постоянного тока
При работе двигателя постоянного тока в обмотках якоря вращающихся в
магнитном поле наводится противо-ЭДС. Ток в цепи якоря создается неболь-
шой разностью между напряжением и противо-ЭДС:
Я
Я
r
E
U
I
.
Внутреннее сопротивление двигателя постоянного тока невелико, у двигателей
средней мощности (10 – 200 кВт) оно составляет несколько десятых – сотых
долей ома. В момент пуска противо-ЭДС якоря равна нулю (
Ф
с
Е
, при
=
0). При этом пусковой ток равный:
Я
П
r
U
I
,
в 10 – 30 больше номинального. Кроме толчка момента, действующего на ме-
ханические части привода и двигателя, такой пусковой ток опасен для коллек-
тора, якорной обмотки и для питающей сети. Ограничить пусковой ток можно
двумя способами – увеличение сопротивления якорной цепи, за счет последо-
вательно включенного реостата, и плавного увеличения питающего напряжения
от нуля до номинального значения.
Первый способ получил название реостатного пуска. В этом случае значе-
ние пускового тока определяется из выражения:
П
Я
П
r
r
U
I
.
Обычно сопротивление r
П
выбирается так, чтобы пусковой ток был в 1.5 – 2.5
раза выше номинального, что обеспечивает большое значение пускового мо-
мента. Пусковой реостат не рассчитан на длительную работу в якорной цепи,
поэтому после окончания разгона он выводится из работы. В процессе разгона
в обмотке якоря появляется противо-ЭДС и ток в какой либо момент времени
определяется из выражения:
П
Я
Я
r
r
Е
U
I
.
По мере увеличения скорости возрастает противо-ЭДС и уменьшается ток
в якоре и момент. Когда электромагнитный момент на валу станет равен мо-
менту сопротивления, возрастание скорости прекратится. Если теперь снова
120
уменьшить сопротивление реостата, возрастет ток и вращающий момент и дви-
гатель продолжит разгон. Для уменьшения времени пуска двигателя и умень-
шения бросков тока пусковой реостат обычно имеет несколько ступеней, кото-
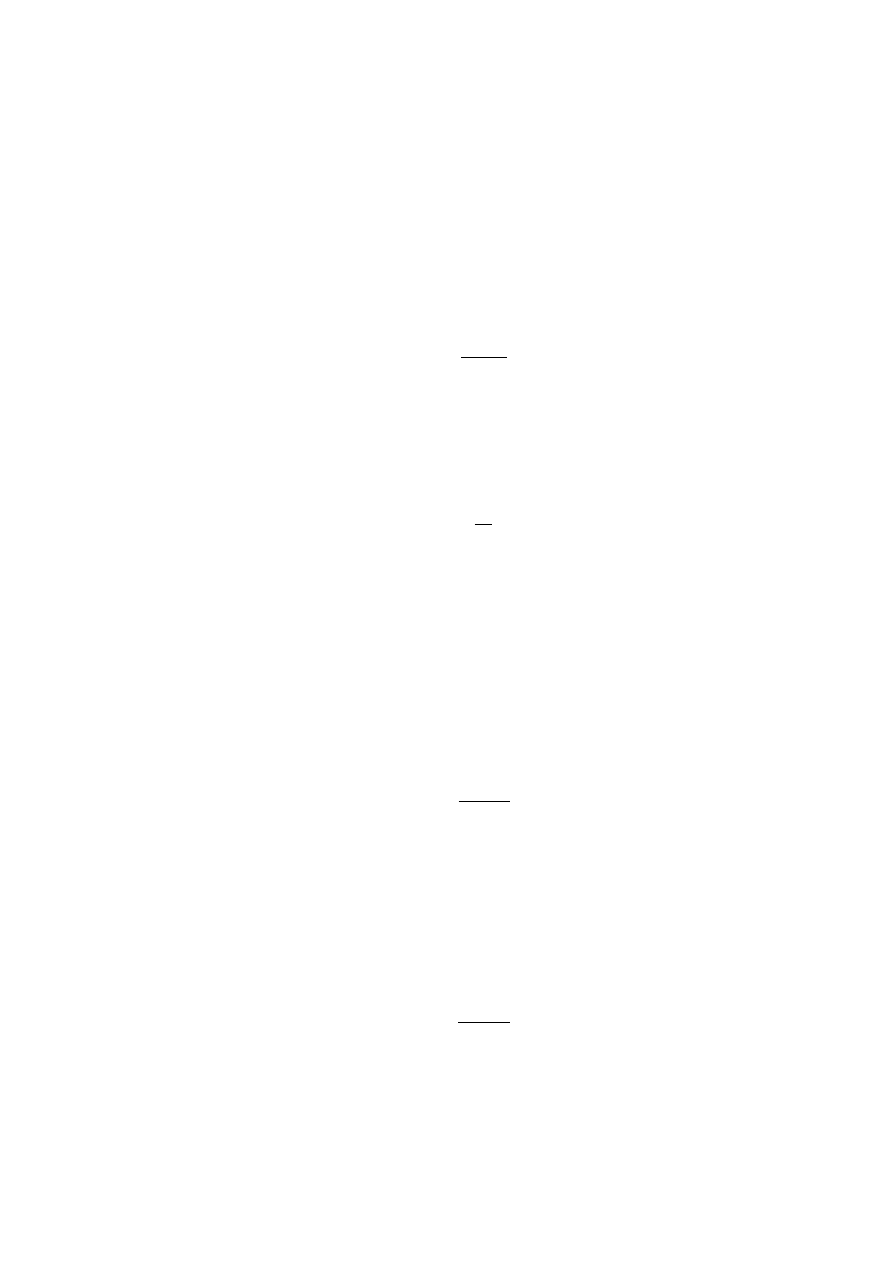
рые последовательно выводятся из цепи. На рисунке 6.3 показана схема вклю-
чения и механические характеристики при реостатном пуске двигателя незави-
симого возбуждения в три ступени.
M
н
М
н
0
1
М
2
М
н
1
М
)
2
.
1
1
.
1
(
М
н
2
М
)
5
.
2
5
.
1
(
М
1
2
3
4
5
6
Ест.
(
К1, К2 замкнуты)
2
Д
R
1
Д
R
2
Д
1
Д
R
R
L
в
U
U
в
K1
K2
(
К1 замкнут)
(
К1, К2 разомкнуты)
Рисунок 6.3 - Реостатный пуск двигателя постоянного тока, независимого
возбуждения
Пуск в ход за счет плавного увеличения питающего напряжения от нуля до
номинального значения применяется только в регулируемых электроприводах,
где двигатель питается от регулируемого источника напряжения (например ти-
ристорного преобразователя).
Регулирование скорости двигателей постоянного тока
Способы регулирования скорости двигателей постоянного тока можно оп-
ределить, рассматривая уравнение механической характеристики:
М
)
Ф
c
(
r
Ф
c
U
2
Я
.
Для двигателя независимого возбуждения возможны три способа регулирова-
ния:
Изменение питающего напряжения U. При этом способе изменяется
скорость идеального холостого хода
Ф
c
U
0
, а наклон механической харак-
теристики не изменяется. Это наиболее эффективный способ регулирования,
так как он обеспечивает наибольший диапазон регулирования (
мин
/
макс
) и
лучшие энергетические характеристики (к. п. д.). Регулирование происходит
плавно, то есть точность регулирования может быть очень высока. Этот метод
121
имеет один недостаток – требуется регулируемый источник питания в цепи
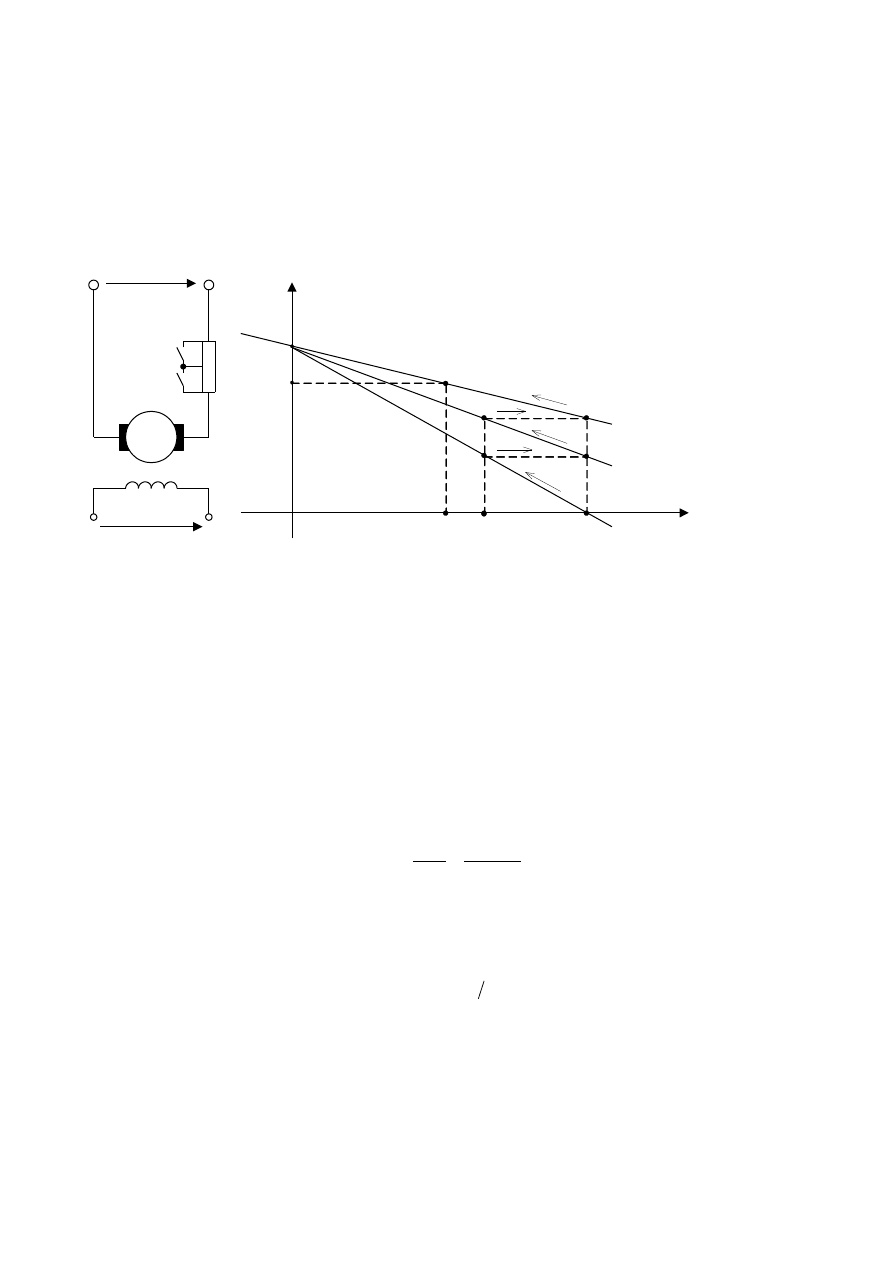
якоря. Механические характеристики двигателя при этом способе регулирова-
ния приведены на рисунке 6.4, а.
M
0
01
02
03
04
ест. (U=Uн)
U=U1
U=U2
U=U3
U=U4
U
н>U1>U2>U3>U4
0
M
0
ест. (Rд=0)
R
д3>Rд2>Rд1
0
R
д1
R
д2
R
д3
M
0
ест. (Ф=Фн)
Фн>Ф1>Ф2
0
Ф1
Ф2
а
б
в
02
01
Рисунок 6.4 - Механические характеристики двигателя независимого
возбуждения при регулировании скорости за счет изменения питающего
напряжения (а), реостатном регулировании (б) и регулировании за счет
ослабления магнитного потока (в)
Изменение сопротивления якорной цепи r
Я
. При этом скорость идеаль-
ного холостого хода остается постоянной, а изменяется угол наклона механиче-
ской характеристики. Регулирование происходит ступенчато, точность регули-
рования зависит от числа ступеней реостата в якорной цепи. Энергетическая
эффективность при таком способе невелика, так как значительная мощность
рассеивается на сопротивлении реостата. Механические характеристики двига-
теля при этом способе регулирования приведены на рисунке 6.4, б.
Изменение магнитного потока машины Ф. Изменение магнитного пото-
ка происходит за счет регулирования тока возбуждения двигателя. Так как ток
возбуждения двигателя значительно меньше тока якоря, то реализовать этот
способ легче реализовать, чем первый, так как регулируемые источники пита-

122
ния малой мощности достаточно просты и доступны. Однако практически все
машины постоянного тока в номинальном режиме работают при насыщенной
магнитной системе. То есть при увеличении тока возбуждения магнитный по-
ток будет возрастать очень незначительно, в то время как ток возбуждения мо-
жет достигнуть недопустимых значений. Поэтому изменение магнитного пото-
ка машины можно производить только в сторону ослабления поля. При этом
скорость будет возрастать выше основной, а характеристики иметь вид анало-
гичный характеристикам двигателя последовательного возбуждения (рисунок
6.4, в). Этот способ зачастую применяется в комбинации с первым для расши-
рения диапазона регулирования.
6.2 Выполнение лабораторной работы в программе Matlab
6.2.1 Описание лабораторной установки
Работа проводится в среде визуального моделирования MATLAB по вари-
антам. В данной лабораторной работе используются библиотеки:
1) Simulink, со следующими разделами:
а) Sinks;
б) Source;
в) Signal Routing.
2) SimPowerSystems, со следующими разделами:
а) Electrical Source;
б) Machine;
в) Measurement.
Блоки разделов соединены по схеме, представленной на рисунке 6.17.
6.2.2 Порядок выполнения работы
Выбрать двигатель постоянного тока из таблицы приложения Б, согласно
варианту, данные о двигателе занести в лабораторный журнал.
Рассчитать параметры двигателя постоянного перед выполнением лабора-
торной работы для имитационной модели в пакете Simulink.
Параметры машины, вводимые в окно настройки, определяются из пас-
портных данных, указанных в таблице приложения Б. В каталогах на электри-
ческие машины постоянного тока приводятся следующие данные:
- мощность
н
P
[кВт];
- напряжение питания якоря
я
U
[В];
- напряжение питания возбуждения
В
U
[В];
- скорость вращения якоря
н
n
[об/мин];
- КПД
н
[%];
123
- сопротивление обмотки якоря
я
R
[Ом];
- сопротивление обмотки возбуждения
В
R
[Ом];
- индуктивность обмотки якоря
я
L
[Гн].
Кроме перечисленных параметров необходимо определить взаимную ин-
дуктивность между обмотками возбуждения и якоря.
Для машины с независимым возбуждением ее величина определяется по-
следовательным расчетом, используя следующие выражения:
В
В
В
U
I
R
,
30
н
н
н
н
н
P
P
М
n
,
.
.
н
я н
В
я н н
P
I
I
U
,
.
н
af
я н B
М
L
I
I
.
Индуктивность обмотки возбуждения при исследовании установившихся
процессов может быть принята близкой к нулю. При исследовании переходных
процессов значение L
В
для машин обычного исполнения выбирается из нера-
венства
(2 5)
Я
B
B
Я
L R
L
R
Момент инерции для двигателей обычного исполнения определяется из
неравенства
2
2
2
2
.
(5 10)
Я
H
Я
H
Я H
L
P
J
R
I
.
Момент сухого трения и коэффициент вязкого трения определяются из
следующих соображений. Общие механические потери для машин обычного
исполнения составляют П
мех
=(0.5-2%)Р
Н
. Кроме того эти потери равны
П
мех
=
2
f
H
m
H
T
B
. Если считать, что потери на трение и вентиляционные потери
приблизительно равны, то
;
2
мех
f
Н
П
T
2
2
мех
т
Н
П
В
Задать рассчитанные параметры в модель двигателя, для этого:
Запустить программу Matlab приложение Simulink. Создать новую модель.
Открыть библиотеку SimPowerSystems и раскрыть раздел Machines.
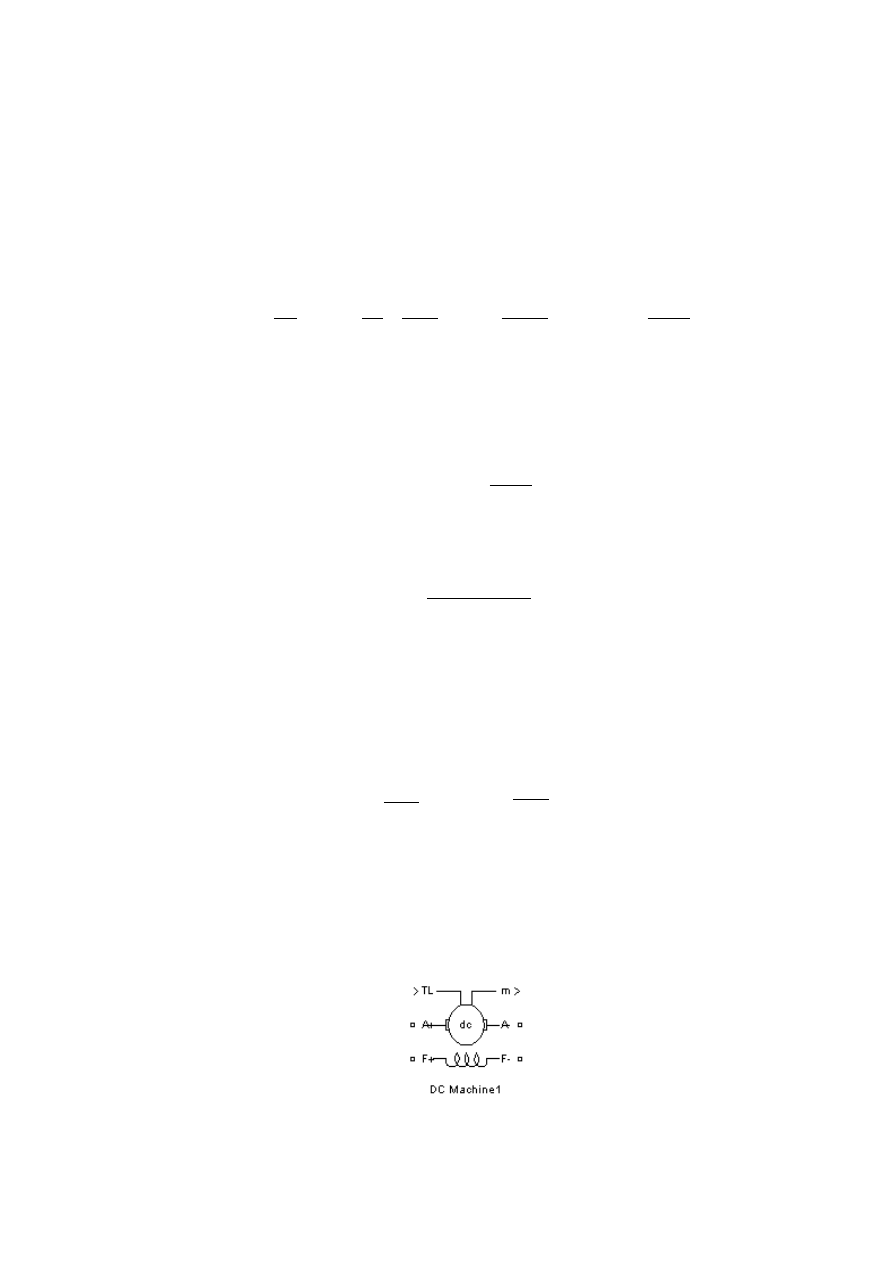
В раскрывшемся списке выбрать элемент DC Machine и перенести в поле
модели (рисунок 6.5)
Рисунок 6.5 - Элемент DC Machine