ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 29.07.2024
Просмотров: 276
Скачиваний: 0
СОДЕРЖАНИЕ
Глава I особенности ремонта электрооборудования и автоматики
§ 1. Организация ремонта электрооборудования
§ 2. Виды ремонта и общая схема технологического процесса
Глава II технология ремонта систем электрооборудования и автоматики
§ 1. Дефекты систем и их классификация
§ 2. Характеристика систем электрооборудования и автоматики как объектов ремонта
§ 3. Методика обнаружения неисправных агрегатов и узлов
§ 4. Замена агрегатов электрооборудования и автоматики
§ 5. Ремонт электромонтажных комплектов и проводов бортовой сети
§ 1. Начальные этапы технологического процесса ремонта аккумуляторных батарей
§ 2. Дефектация, ремонт и изготовление деталей и узлов
§ 3. Сборка и испытание аккумуляторных батарей
Глава IV технология ремонта электрических машин
§ 1. Начальные этапы технологического процесса ремонта электрических машин
§ 2. Дефектация, ремонт, изготовление деталей и узлов
§ 3. Сборка и испытание электрических машин
Глава V технология ремонта аппаратов регулирования и управления
§ 1. Начальные этапы технологического процесса ремонта аппаратов регулирования и управления
§ 2. Дефектация и ремонт узлов
§ 3. Сборка и предварительная регулировка аппаратов
§ 3. Сборка и предварительная регулировка аппаратов
Сборка при капитальном ремонте, а также установка исправных узлов и деталей при текущем ремонте аппаратов регулирования и управления происходят в соответствии с монтажными схемами и сборочными чертежами. В процессе сборки необходимо обеспечить:
—свободное, без заеданий и перекосов, перемещение подвижных деталей (сердечники реле, рамы гироскопов, шестерни пультов управления и т. п.);
—точность исходного положения подвижных деталей относительно неподвижных (контакты реле, ползунки потенциометров и систем коррекции, ротор и статор вращающегося трансформатора (ВТ) и т. п.);
—соответствие техническим условиям механических параметров (моменты трения, ходы сердечников, углы поворота, зазоры и т. п.);
—правильность и надежность всех электрических соединений;
—надежную герметичность аппаратов.
Предъявленные требования вынуждают в процессе сборки проводить целый ряд регулировочных и подгоночных работ. Методика их выполнения в принципе не отличается от рассмотренной ранее общей методики сборки узлов и агрегатов танков. Однако имеется существенное отличие в способах оценки точности их выполнения. Это отличие обусловлено тем, что подавляющее большинство чисто механических параметров (трение, зазоры, линейные перемещения и. т. д.) оказывает существенное, а иногда определяющее воздействие на выходные электрические параметры электромеханических систем. Например, момент трения в подшипниках рам гироскопа существенным образом влияет на точность стабилизации; неточность взаимной установки ротора и статора приводит к резкому увеличению остаточного напряжения вращающегося трансформатора; выход за заданные пределы зазора в разомкнутых контактах командного реле обратного тока приводит к недопустимому изменению величины обратного тока и т. д. Поэтому многие подобные параметры измеряются не непосредственно, а путем оценки тех электрических величин, на которые эти механические параметры влияют. Так, по величине остаточного напряжения регулируют взаимную выставку ротора и статора ВТ; балансировка рам гироскопов оценивается частотой срабатывания системы коррекции и скоростью изменения напряжения на выходе ВТ датчика угла и т. д.
Большое внимание при сборке всех типов реле следует уделять регулировке зазоров. При этом необходимо помнить, что зазор между якорем и сердечником в исходном положении, наряду с натяжением пружины, обусловливает напряжение (ток) срабатывания реле. Этот же зазор в рабочем положении вместе с натяжением пружины определяет напряжение (ток) выключения реле. В тех реле, где этот зазор в рабочем положении регулировке не поддается, а контакты нормально разомкнуты (командное реле), напряжение (ток) выключения зависит, кроме усилия пружины, от зазора в разомкнутых контактах.
§ 4. Испытание и окончательная регулировка аппаратов
При текущем ремонте испытание и окончательная регулировка проводятся на том же оборудовании, что и предварительная оценка технического состояния. Цель испытаний — убедиться в работоспособности отремонтированного аппарата.
После капитального ремонта испытания проводятся с целью установления соответствия работы аппаратов требованиям технических условий. Окончательная регулировка, если таковая требуется, и испытания после капитального ремонта должны проводиться в рабочих, а иногда и в перегрузочных режимах. Поэтому для этих испытаний используется достаточно сложное оборудование, полностью копирующее режим работы соответствующего аппарата на танке.
Аппараты регулирования и управления систем стабилизации вооружения окончательно испытывают и регулируют на стендах-башнях или на башнях отремонтированных танков совместно со всеми остальными агрегатами этих систем.
Релерегуляторы испытывают совместно с генератором по схеме на рис. 306. Регулировку аппаратов реле-регулятора производят только натяжением пружин, не изменяя установленных в процессе сборки и предварительной регулировки зазоров. Напряжение срабатывания реле обратного тока фиксируют в момент появления тока зарядки аккумуляторных батарей при увеличении оборотов генератора. Величину обратного тока фиксируют по амперметру зарядной цепи при уменьшении оборотов генератора.
Регуляторы напряжения настраивают на величину поддерживаемого ими напряжения при определенных оборотах генератора на холостом ходу, а затем проверяют их работу под нагрузкой. При этом необходимо обеспечить одинаковые условия работы контактов каждого регулятора, т. е. обеспечить равенство токов в цепях возбуждения при одних и тех же оборотах генератора. Это достигается за счет поочередной регулировки каждого регулятора при оборотах холостого хода или при эксплуатационных оборотах совместной регулировкой регуляторов до получения нулевых показаний вольтметра V2 (рис. 306).
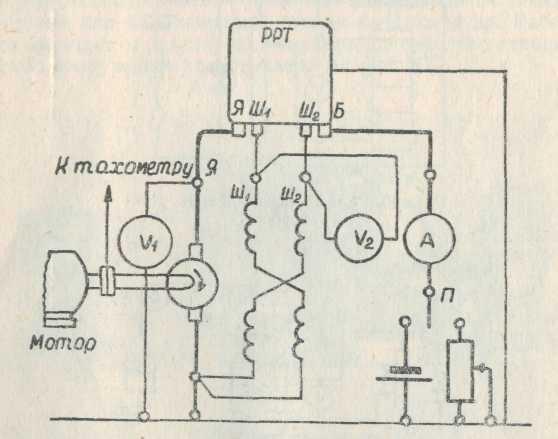
Рис. 306. Схема испытания реле-регулятора совместно с генератором
Отдельные сильноточные контакторы и тяговые реле (пусковые реле и реле привода стартеров, реле электропусков, электромагниты арретиров и т. п.) испытывают на напряжение включения, напряжение отключения и величину развиваемого усилия. Схемы испытаний представлены на рис. 307 и 308. Контрольная лампочка
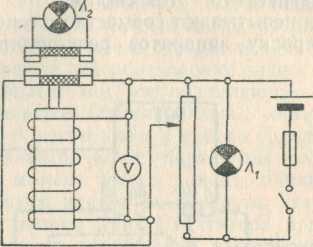
Рис. 307. Схема испытаний контакторов
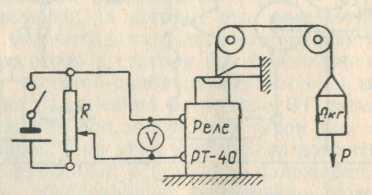
Рис. 308. Схема испытаний тяговых реле
Л2 при испытании контакторов (см. рис. 307) служит индикатором включения контактора. Напряжение, подводимое к реле, регулируется потенциометром и фиксируется вольтметром. Величина груза и время его выдержки при испытании тяговых реле (см. рис. 308) при заданном подводимом напряжении оговаривается техническими условиями. Подводимое напряжение регулируется потенциометром. После проведения контрольных испытаний производят фиксацию регулировочных винтов от самопроизвольного отворачивания,
окраску аппаратов, пломбирование и сдачу из ремонта или установку на ремонтируемые танки.
§ 5. Особенности технологии ремонта гироскопическихприборов
При ремонте гироскопических датчиков наряду с такими электромонтажными операциями, как пайка тонких проводников, сборка на основаниях релейных, электромагнитных, трансформаторных и прочих элементов, необходимо выполнять и точные слесарно-механические операции: сборку подшипниковых узлов, статическую и динамическую балансировку рам, взаимную выставку подвижных и неподвижных контактов и т. п. При испытании и при регулировочных работах приходится пользоваться достаточно сложными электро- и радиоизмерительными приборами: осциллографами, ламповыми вольтметрами и т. д.
Существенные особенности имеет применяемая при ремонте гироприборов технологическая оснастка: испытательные стенды, приспособления для балансировки, стенды-качалки и др. Рабочее место для проверки и регулировки гироприборов систем стабилизации танкового вооружения представлено на рис. 309.
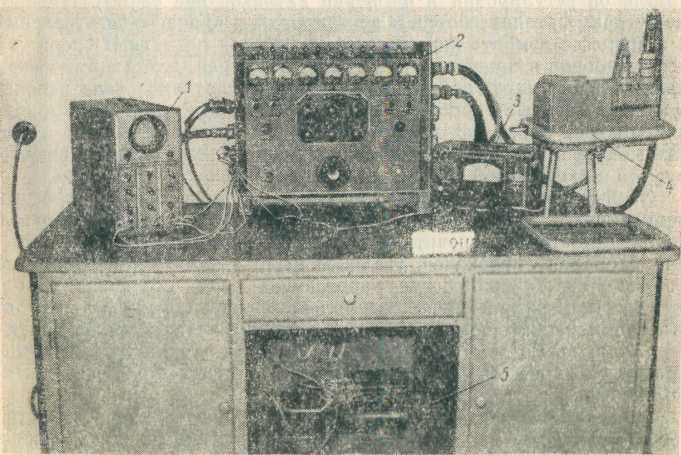
Рис. 309. Рабочее место по ремонту гироскопических и электронных приборов
стабилизаторов танкового вооружения:
1 — электронный осциллограф; 2 — испытательный щит; 3 — ламповый вольтметр; 4 — подставка под гироблок; 5 — преобразователь ПТ-200Ц
Кроме осциллографа и лампового вольтметра, устанавливаемых отдельно на стенде-верстаке, на нем же устанавливается щит с коммутирующими элементами и контрольными приборами. В нижней части стенда-верстака установлен преобразователь ПТ-200Ц, обеспечивающий питание гиромоторов и первичных обмоток вращающихся трансформаторов.
Полная электрическая схема рабочего места представлена на рис. 310. Она представляет собой комбинацию менее сложных схем испытаний отдельных гироскопических датчиков различных систем стабилизации танкового вооружения. Одна из таких схем — схема испытаний датчика угла — представлена на рис. 311. Эта схема обеспечивает приближенную имитацию статического режима работы датчика угла. Здесь поданы следующие питающие напряжения: постоянное 26 В через выключатель В на преобразователь ПТ-200Ц, через выключатель В3 на электромагнит арретира и систему коррекции, а также через кнопку К2 и переключатель П2. на электромагнит наведения; переменное 36 В 400 Гц от преобразователя на обмотки гиромотора и на первичную обмотку вращающегося трансформатора; кроме того, осциллограф и ламповый вольтметр питаются переменным напряжением 220 В промышленной частоты.
Указанное оборудование используют как при оценке технического состояния датчиков, поступивших в ремонт, так и на этапе окончательной регулировки и проверки датчиков вне систем. На промежуточных этапах сборки и регулировки, в процессе изготовления и в процессе ремонта применяется целый ряд различных специальных приборов и приспособлений. Так, например, для динамической балансировки наружной и внутренней рам датчиков угла используют специальные вибростенды, обеспечивающие «оживление» подшипниковых опор; для измерения порога чувствительности гиро-тахометров применяют специальные вращающиеся столы с регулируемой и измеряемой скоростью вращения.
Особые требования предъявляются к помещениям, в которых ремонтируются гироприборы. Они обусловлены главным образом необходимостью обеспечить минимально возможные моменты трения в опорах гироскопов. Наличие пыли в таких помещениях не допускается. Личный состав, работающий в этих помещениях, должен иметь одежду и обувь, специально предназначенную для работы. В помещениях не допускается установка металлообрабатывающих станков. Готовые к установке в приборы подшипники должны храниться в чистом бензине или под специальными стеклянными колпаками.
Гироскопические приборы включают значительное количество элементов, узлов и электроаппаратов, характерных для любых аппаратов регулирования и управления. К таким элементам относятся электромагниты поворотные и тяговые, реле, контактные группы и т. д. Однако в конструкцию гироскопических приборов входят и своеобразные узлы: гиромоторы, подшипники карданова подвеса, рамы, торсионы и т. п. 582
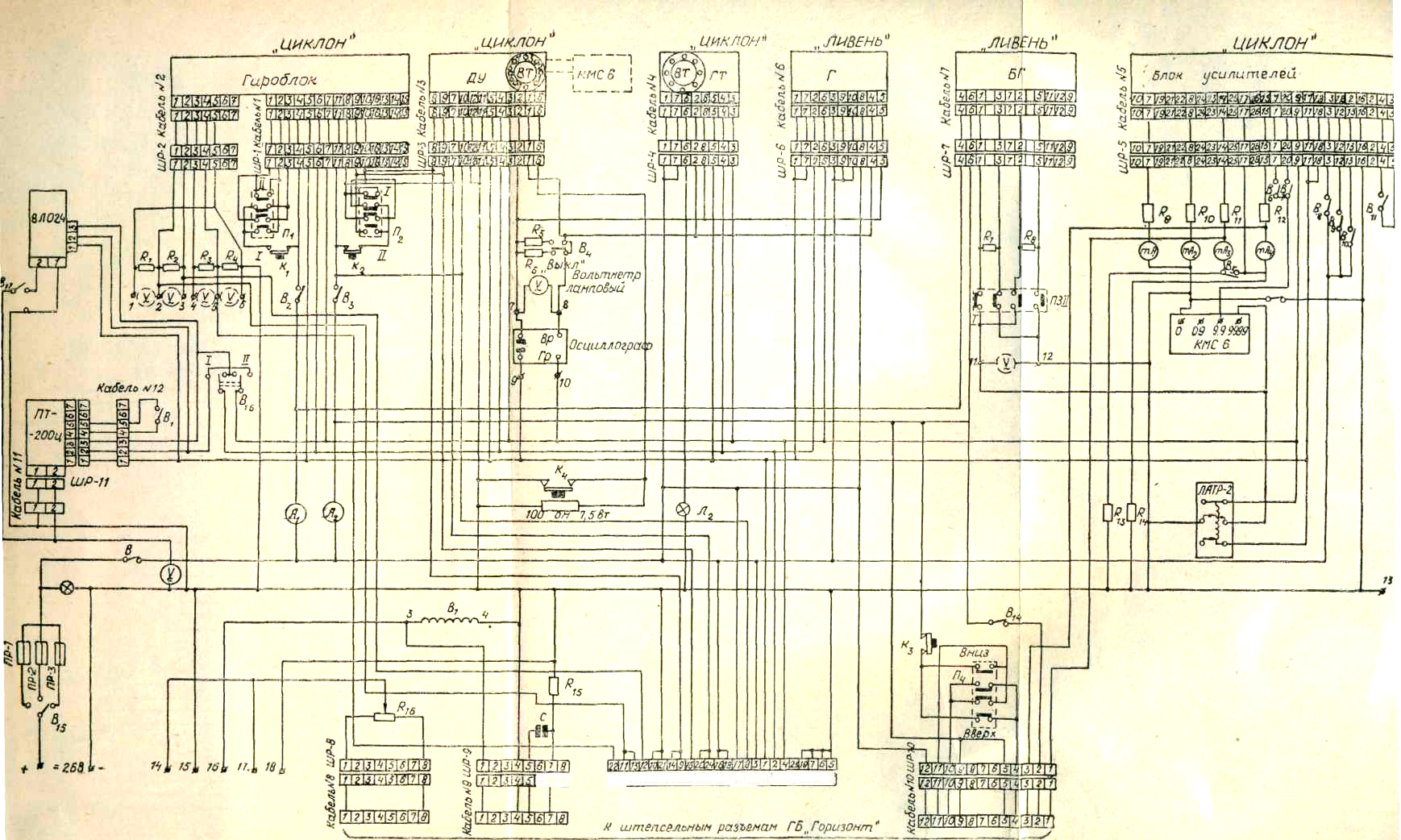
Рис. 310. Электрическая схема рабочего места по ремонту гироскопических и электронных приборов
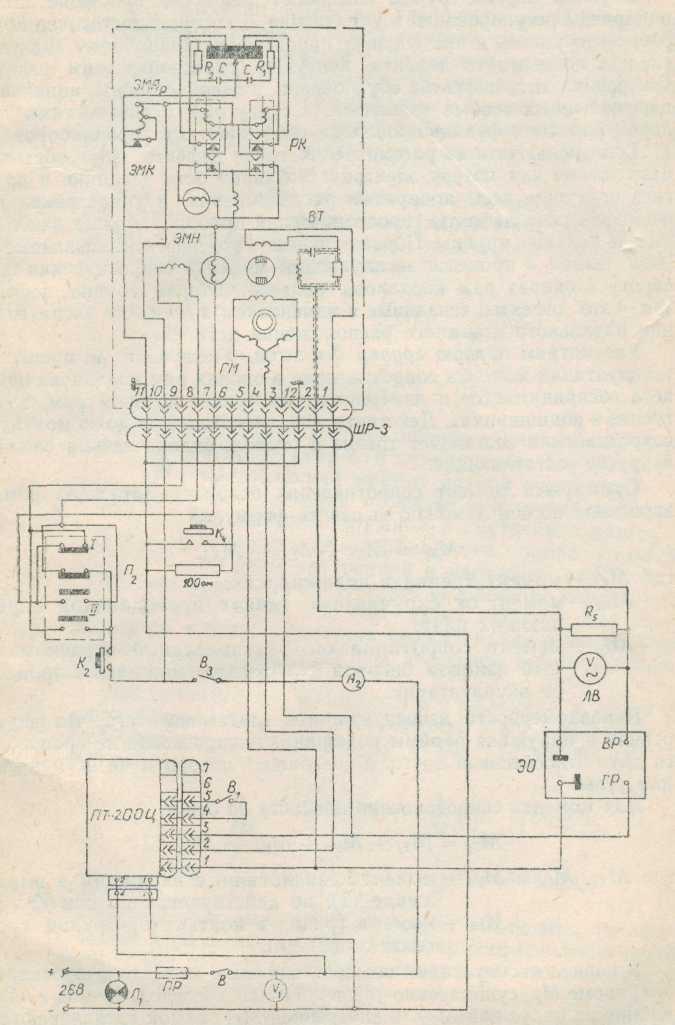
Рис. 311. Схема испытаний гироскопического датчика угла
В узлах первой группы возникают дефекты, присущие всем аппаратам регулирования и управления, о которых достаточно подробно говорилось в предыдущих параграфах. Подробному анализу следует подвергнуть дефекты, присущие гироскопическим узлам. Специфика этих дефектов обусловлена, с одной стороны, наличием перечисленных особых элементов, а с другой — особенностями условий работы и функциональными особенностями гироприборов.