Файл: Федеральное государственное бюджетное образовательное учреждение высшего образования сибирский государственный университет водного транспорта.docx
ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 06.12.2023
Просмотров: 95
Скачиваний: 1
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
4. ПЛАВАНИЕ С ИСПОЛЬЗОВАНИЕМ НАЗЕМНЫХ ОРИЕНТИРОВ. ОПРЕДЕЛЕНИЕ МЕСТА СУДНА
4.1. Определение места судна
Учет перемещения судна путем ведения графического счисления не является достаточно точным методом. Для уточнения своего положения судоводитель должен систематически определять место судна по наблюдениям различных ориентиров, положение которых известно.
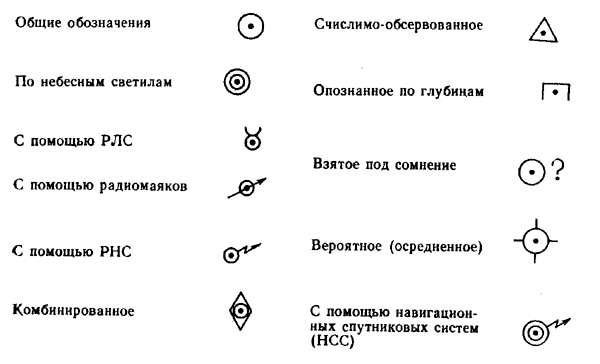
При визуальных способах определения места судна для наблюдений используют нанесенные на карту хорошо видимые и опознанные береговые и плавучие маяки, огни, неосвещаемые знаки, башни, церкви, а также различные естественные ориентиры: мысы, вершины гор, скалы и т.д. Не следует использовать для обсерваций буи, вехи и другие знаки плавучего ограждения, так как они могут быть снесены со своих штатных мест. Для указания на карте места судна, полученного по обсервациям, применяют условные обозначения:
Способы визуального определения места судна:
-
По пеленгам двух ориентиров; -
По пеленгу трех ориентиров; -
По двум горизонтальным углам; -
По пеленгу и горизонтальному углу; -
По крюйс-пеленгу; -
По пеленгу и расстоянию; -
По двум расстояниям; -
По пеленгу в момент открытия ориентира и по пеленгу и глубине.
Определение пути судна по трем пеленгам неподвижного ориентира
Азовское море, Керченский пролив;
φ= 45o34,1N
λ=036o34,1Е м. Змеиный ИП=319o S=3,0
ОЛ=21,5миль м. Карантинный ИП=308o S=5,0
Тс=11:00 м. Ак-Бурун ИП=80o S=6,2
ИК=246,8o ГКК=246,7o ∆ГК=+0,1o
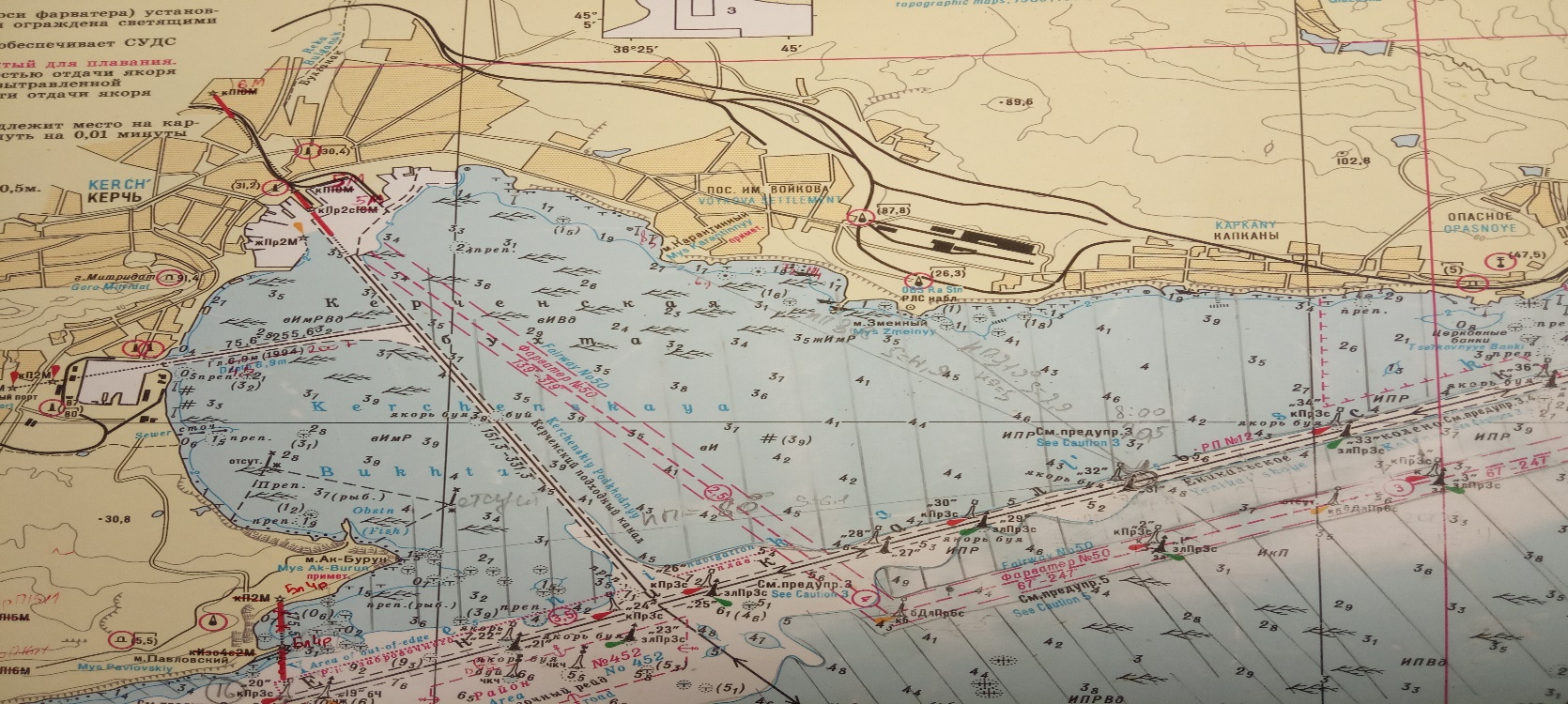
Рисунок.2.8- Карта: Азовское море, Керченский пролив.
Выполнение исполнительной прокладки с учетом всех факторов:
Азовское море, Керченский пролив;
φ= 45o12,2N φ= 45o15,8N
λ=036o284,Е λ=036o282,Е
ОЛ=14,3миль ОЛ=14,3 миль
Тс=13:45 Тс = 13:45
ИК=355o ИК=355o
ГКК=355o ГКК=355o
∆ГК=+0o ПУ=355 S=2,0 ∆ГК=+0o ПУ=355 S=2,0
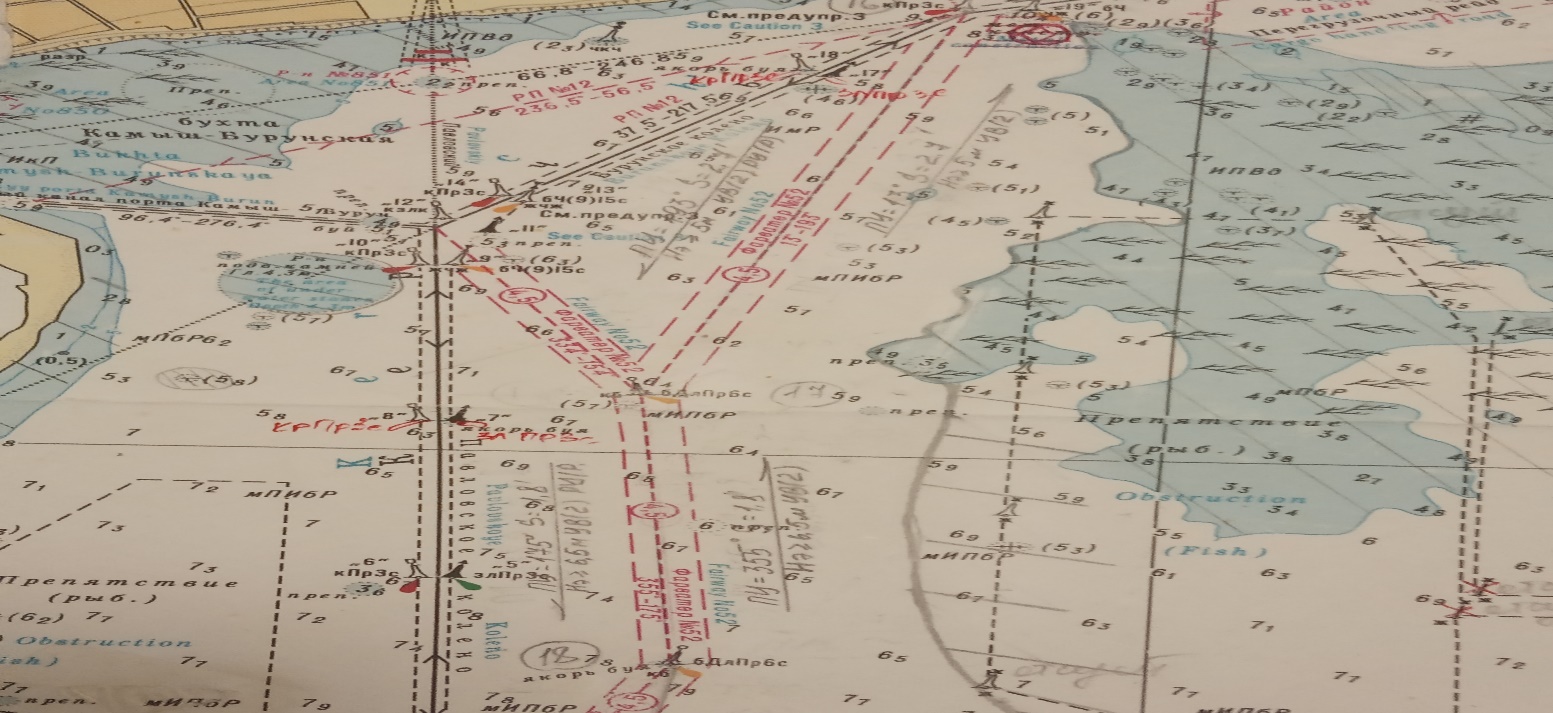
Рисунок.2.9-карта:Азовское море, Керченский пролив.
Определение места по 2 и 3 визуальным пеленгам:
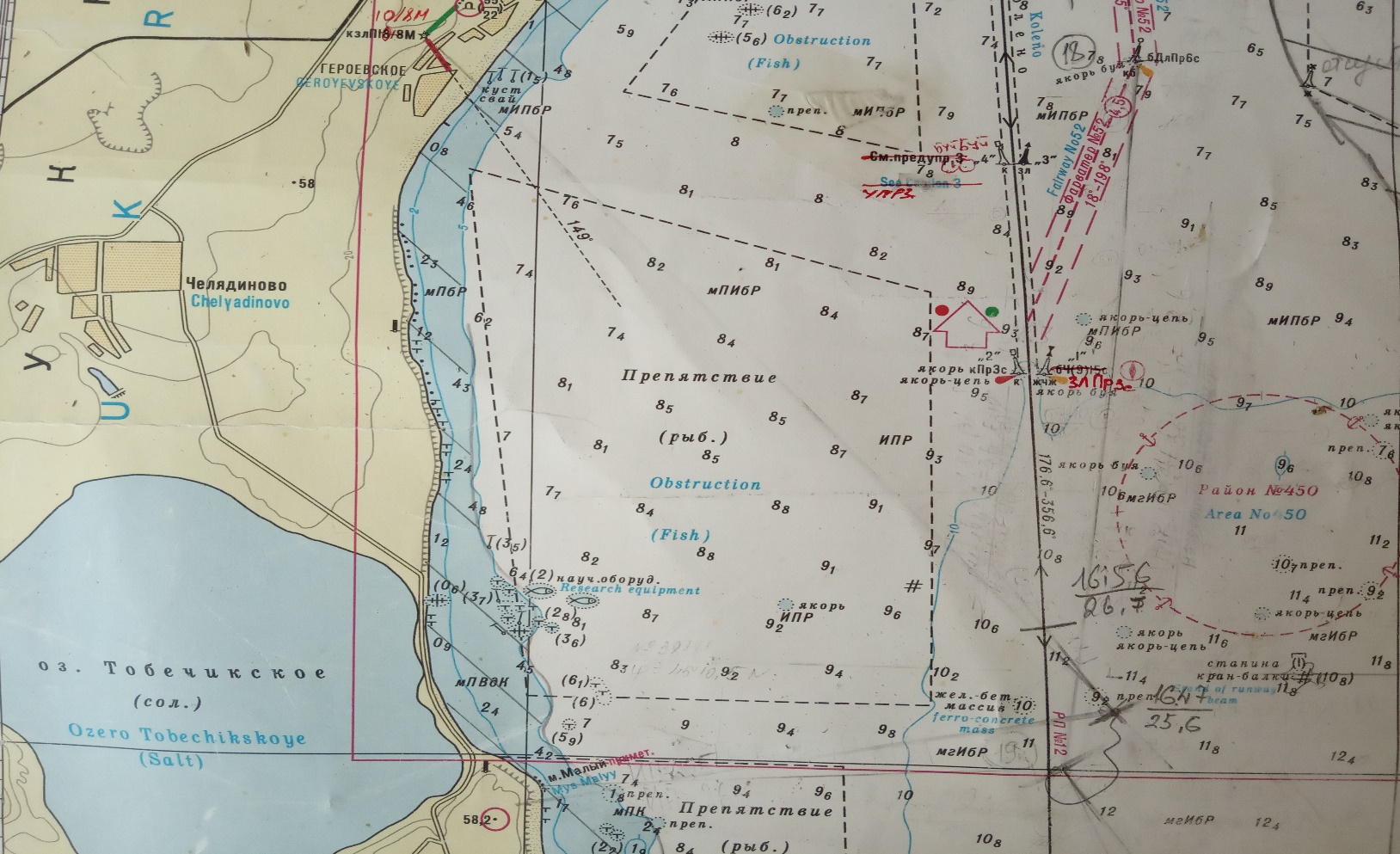
Рисунок.2.10-Карта: Азовское море, Керченский пролив;
φ= 45o10,4N ИП=319o Героевский;
λ=036o284,Е ИП=257 o м.Малый;
ОЛ=27,1 миль
Тс=16:47
ИК=325o
ГКК=326o ∆ГК=+0o
КК= 325 o ∆КК= +1 o
Определение места по 2 горизонтальным углам:
Если с судна хорошо видны три ориентира обозначенные на карте, между ними можно измерить секстаном два горизонтальных угла, окружности вмещающие данные углы будут являться линиями положения судна в момент наблюдения.
Построив этим же способом окружность вмещающую угол Р, измеренный между ориентирами , В и С, получим вторую линию положения ВСР, на одной из точек которое должно находиться судно. Если угол α или β равен 90о, то для определения центра окружности нужно при точке Л построить угол α-90о(центр вмещающей окружности будет в точке 0).
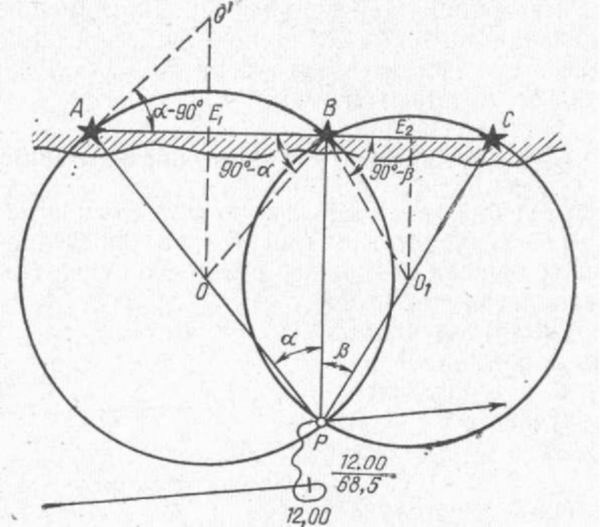
Рисунок.2.14- способ определения по 2 горизонтальным углам.
при одновременном измерении углов судно должно быть сразу на обеих окружностях, т.е. его место будет в точке Р- точке пересечения обеих линий положения. Две окружности пересекаются всегда в двух точках, но одна из них совпадает со средним предметом, так что сомнений, в которой из двух точек пересечения окружностей находится судно, быть не может.
Определение места по крюйс-пеленгу.
Навигационный метод определения места судна по крюйс пеленгу применяется в тех случаях, когда пеленг на предмет определить можно, а вот расстояние до него — нет. Предмет пеленгуют дважды, место судна получают на момент вторых измерений. Место это будет счислимо-обсервованным, а не обсервованным, счислимо-обсервованное место получается всегда с использованием элементов счисления (времени и отсчетов лага). Следовательно, его точность впрямую зависит от точности счисления,тогда как чисто обсервованное место от счисления не зависит
, и на него можно полагаться вернее.
При пеленговании в навигационном методе определения места судна по крюйс пеленгу замечают моменты времени Т1 и Т2 и отсчёты лага ОЛ1 и ОЛ2. Прокладка и вычисления в яхтинге выполняются в следующей последовательности.
1) Прокладывают первый пеленг П1. На линии пути отмечают счислимую точку, записывают время Т1 и отсчёт лага OЛ1.
2) Прокладывают второй пеленг П2, отмечают время Т2 и отсчёт лага OЛ2.
3) При определении места судна по крюйс пеленгу из точки ориентира проводим линию, параллельную линии пути судна в направлении движения яхты (линия К).
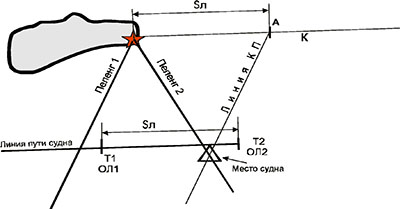
Рисунок.2.15 Способ определения по крюйс-пеленгу.
Определение поправки гирокомпаса по удалённому объекту.
В данном подпункте для определения поправки гирокомпаса в качестве удалённого объекта взято солнце. С помощью морского астрономического ежегодника рассчитаны азимуты солнца, которые в свою очередь являются истинными пеленгами на солнце. Разность истинного пеленга и гирокомпасного (компасный) пеленга и будет поправкой гирокомпаса.
Керченский пролив, координаты =4527,4’N, =36,42,4’E, 19 августа 2019 г., 19.00 по судовому времени соответствующему Московскому, курс 88,5, скорость 6,5 узла





Таганрогский залив, координаты =4646,4’N, =3730,2’E, 14 октября 2019 г., 18.00 по судовому времени соответствующему Московскому, курс 215,0, скорость 9 узлов





Определение поправки гирокомпаса по пеленгу створа.
Цимлянское Водохранилище, Входной створ в Цимлянское ВДНХ, 24 июня 2019 г., 15.40 по судовому времени, курс 15,5, скорость 5 узлов


Река Волга, створы Волжские, 19 сентября 2019 г., 19.00 по судовому времени, курс 291,2, скорость 5 узлов


Определение поправки гирокомпаса по сличению с главным.
Керченский пролив, координаты =4526,4’N, =3640,4’E, 15 августа 2019 г., 18.00 по судовому времени соответствующему Московскому, курс 88,5, скорость 6,5 узла

Таганрогский залив, координаты =4646,4’N, =3730,2’E, 11 октября 2019г., 18.00 по судовому времени соответствующему Московскому, курс 215,0, скорость 9 узлов

Обработка, размещение и крепление грузов.
Все грузы должны быть размещены и закреплены таким образом, чтобы судно и экипаж не подвергались опасности.
Безопасное размещение и крепление грузов зависят от надлежащего планирования, исполнения и надзора.
Лица, которым поручен надзор за размещением и креплением груза, должны иметь достаточную квалификацию и опыт.
Лица, планирующие и осуществляющие надзор за размещением и креплением груза, должны иметь глубокие практические знания в области применения и содержания "Наставления по креплению груза", если таковое имеется на судне.
5. РАДИОНАВИГАЦИОННЫЕ СРЕДСТВА
5.1. Средства автоматической радиолокационной прокладки
Дисплей JRC JMA
Включение питания
Кнопка включения (POWER ON) с (зелёный светодиод). Для включения монитора и панели оператор должен нажать и удерживать кнопку в течение 5 сек; для выключения - отпустить и нажать вновь. При первом нажатии кнопки светодиод загорается при повторном гаснет.
Включение излучения
- нажмите кнопку(TX/ON)
Кнопка включения с индикатором (жёлтый светодиод). Предназначена для перевода из режима ожидания в режим приёма. Радар начинает излучение, включается вращение антенны
Выключение излучения
- нажмите кнопку (TX/ON) на блоке монитора.
Радар прекращает излучение, а антенна вращение.
Выключение питания
- нажмите кнопку (POWER ON) и удерживать в течение 5 сек.
Радар выключен.
Измерение пеленга цели и расстояния
Кнопка кратковременного нажатия (SELECT) используется для выбора соответственно EBL1 или 2.
Кнопка кратковременного нажатия EBL/VRM 1 – 2. Используется для включения/выключения электронной линии румба и метки переменного кольца. При нажатии кнопки (1или 2), производится автоматическое отображение ERBL 1 или 2, данные отображаются в соответствующих окнах.
Кнопка кратковременного нажатия (ACQUIRE). Используется для запроса целей ARPA или активации цели AIS.
(TRACKBALL) – устройство задания местоположения. Используется для перемещения курсора по области отображения цели (крестик), области системных данных (чёрная стрелка),по кнопкам, с помощью которых возможно изменять значения(серая двойная горизонтальная стрелка).
Картографический радиолокатор Navi-Radar 4000 Учитывая тенденции в разработке радаров нового поколения, основанных на базе персональных компьютеров, способных не только отображать радиолокационную картинку, но и