Добавлен: 09.01.2024
Просмотров: 132
Скачиваний: 2
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
1.3. Критерии оптимизации
Критерий оптимизации - количественный или порядковый показатель, который выражает предельную меру экономического, научно-технического или другого эффекта принимаемого решения для сравнительной оценки возможных решений (альтернатив) и выбора наилучшего.
Вопрос о выборе критерия оптимизации - один из самых важных в процессах оптимизации, в то же время он один из наиболее сложных, и процесс выбора критерия содержит существенную творческую составляющую. Рассмотрим более подробно требования, которые должны предъявляться к критерию оптимизации.
Критерий оптимизации должен:
- выражаться количественно;
- быть единственным;
- отражать наиболее существенные стороны процесса;
- иметь ясный физический смысл и легко рассчитываться.
При постановке конкретных задач оптимизации критерий оптимизации должен быть записан в виде аналитического выражения. В том случае, когда случайные возмущения невелики, а их воздействие на объект можно не учитывать, критерий оптимизации может быть представлен как функция входных, выходных и управляющих параметров:
Kопт. = K(Х1, Х2, …, Хn, Y1, Y2,… Yn, U1, U2,… Un),
где К – критерий оптимизации; Y – выходные параметры; Х – контролируемые входные параметры; U – регулируемые, управляющие параметры.
Так как Y=f (U), то при фиксированных Х можно записать К = К (Ui ср.)
При этом всякое изменение значений управляющих параметров двояко сказывается на величине К:
– прямо, т.к. управляющие параметры непосредственно входят в выражение критерия оптимизации;
– косвенно – через изменение выходных параметров процесса, которые зависят от управляющих.
Если же случайные возмущения достаточно велики и их необходимо учитывать, то следует применять экспериментально-статистические методы, которые позволят получить модель объекта в виде функции
Y = φ (Xi,Ui),
которая справедлива только для изученной локальной области. Тогда критерий оптимальности примет следующий вид:
К = К(Xср.,Uср.).
В принципе, для оптимизации вместо математической модели можно использовать и сам объект, однако оптимизация опытным путем имеет ряд следующих недостатков:
– необходим реальный объект;
– необходимо изменять технологический режим в значительных пределах, что не всегда возможно;
– длительность испытаний и сложность обработки данных.
Наличие математической модели (при условии, что она достаточно надежно описывает процесс) позволяет значительно проще решить задачу оптимизации аналитическим либо численным методами.
Критерии оптимизации могут классифицироваться разными способами, в зависимости от конкретных задач.
Так, иногда различают простые и сложные критерии оптимизации. Критерий оптимизации называется простым, если требуется определить экстремум целевой функции без задания условий на какие-либо другие величины. Такие критерии обычно используются при решении частных задач оптимизации (например определение максимальной концентрации целевого продукта, оптимального времени пребывания реакционной смеси в аппарате и т.п.).
Критерий оптимизации называется сложным, если необходимо установить экстремум целевой функции при некоторых условиях, которые накладывают ограничения на ряд других величин (например, определение максимальной производительности при заданной себестоимости, определение оптимальной температуры при ограничениях по термостойкости). Как правило, процедура решения задачи оптимизации обязательно включает, помимо выбора управляющих параметров, еще и установление ограничений на эти параметры. Ограничения могут накладываться как по технологическим, так и по экономическим соображениям.
В некоторых случаях выделяются два других вида критериев оптимизации. Это, во-первых, критерии оптимизации прагматические – выработанные практикой качественные или количественные характеристики оптимальности работы различных систем и, во-вторых, критерии оптимизации математические – разработанные математиками математические критерии оптимальности, положенные в основу аналитических, графоаналитических, численных и машинных методов оптимизации.
В настоящее время наблюдается сближение этих двух критериев: с одной стороны, появились новые математические методы оптимизации, такие, как принцип максимума и динамическое программирование, которые лучше приспособлены для решения практических задач оптимизации, с другой стороны, практика проектирования все чаще пользуется критериями оптимальности, удобными в математическом смысле. Так произошло с критерием среднеквадратической ошибки, принятым в качестве оценки точности работы автоматических систем регулирования, и критерием вероятности, утвердившимся как количественная оценка эффективности для работы системы.
На практике используется целый ряд критериев оптимизации. Выбор того или иного критерия зависит от экономиста или конструктора системы управления, и в этом содержится элемент нестрогости. В то же время, при использовании в оптимизирующих расчетах библиотек прикладных программ для языков программирования все чаще применяют типовые критерии, которые становятся общепринятыми и заносятся непосредственно в технические задания.
Далее рассматривается ряд примеров критериев оптимизации, которые используются в инженерной практике.
Критерий среднего квадрата ошибки – требование минимума дисперсии или квадрата ошибки между заданным h(t) и выходным x(t) сигналами системы.
Этот критерий применяется при оценке качества работы автоматизированных систем регулирования и удобен при решении математических задач оптимизации. Требование минимума дисперсии или квадрата ошибки (рис. 2) между заданным (или желаемым) h(t) и выходным х(t) сигналами системы записывается как
e2ср = [h(t) - x(t)]2ср min
и означает большую нежелательность (по сравнению с линейным законом) больших (чем малых) по значению ошибок (рис. 3). Причем, в соответствии с рис.2 h(t) получается из полезного входного сигнала m(t) с помощью заданного оператора x(t), в то время как реальный сигнал x(t) получается из входного сигнала системы s(t) с помощью оператора k(t), который следует найти. При использовании критерия
|eср| =|h(t) - x(t)|ср =min,
где “ср“ означает усреднение по ансамблю, считается, что вред, наносимый ошибкой, пропорционален ее величине.
Рис. 2. Схема определения ошибки автоматической системы регулирования
Рис. 3. Оценка качества управления по величине дисперсии
Средний квадрат ошибки e2ср - это функционал от ее импульсной переходной функции и для стационарных сигналов и линейной системы имеет вид
e2ср = Rh(0) - 2
где Rh(τ) и Rs(τ) - функции корреляции желаемого
h(t) и входного s(t) сигналов, а Rhs(τ) - их взаимная функция корреляции.
Если при минимизации требуется обеспечить заданное значение динамической ошибки, то добавляются условия
где μz - заданные числа, и задача становится вариационной задачей на условный экстремум.
Интегральный критерий – это критерий, имеющий вид интеграла по отрезку (в общем случае по области), на котором (ой) задана искомая функция. Такой критерий, в частности, используется для определения параметров системы управления, оптимальной в переходном режиме, и в качестве него иногда выбирается минимум функционала
I1 =
где e - ошибка рассогласования в системе (рис. 4).
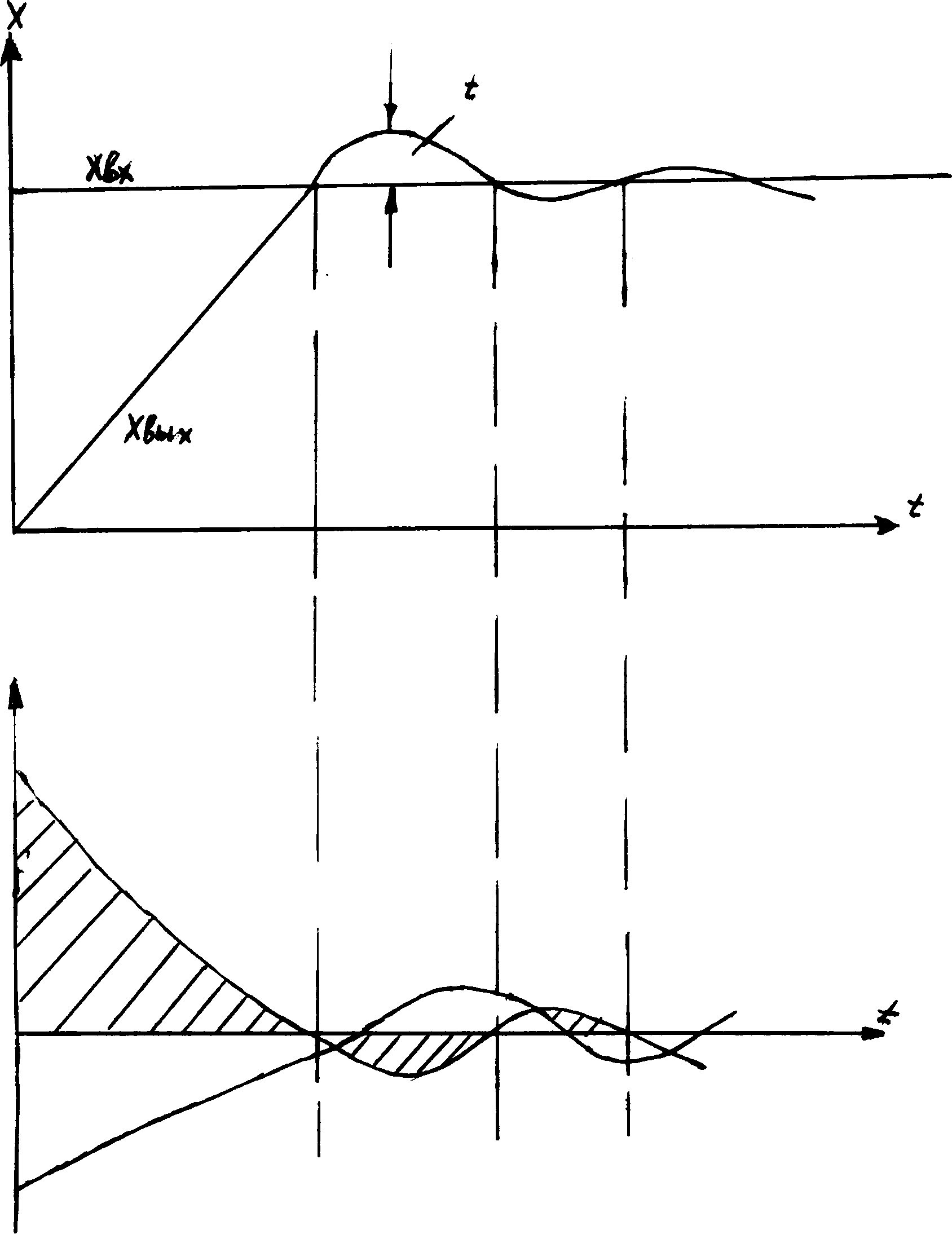
Рис. 4. Интегральный критерий качества
Оптимальная система управления - система, реализованная в виде набора правил, стратегии, согласно которым следует поступать в соответствующих ситуациях для получения оптимального решения.
Требованием минимума функционала
I1 min
можно обеспечить в системе переходный процесс с малыми отклонениями, величина которых определяет величину интеграла
Переходный процесс достаточно плавный, без резких колебаний, что определяется величиной интеграла
который по существу включает управление по производной. Дело в том, что при переходе нулевого значения ошибки e производная e/ принимает большие значения и из-за этого возникают большие переколебания. Наличие второго члена в функционале уменьшает значение производной, способствуя меньшим колебаниям.
Интегральный критерий требует минимума суммарной площади, ограниченной кривыми ошибки, ее производной и осью абсцисс, причем последняя площадь берется с весом Т. Из рис. 4 видно, что эти две кривые “работают” со сдвигом примерно в 90 градусов, и коэффициент Т осуществляет оптимальный баланс между управлением по ошибке и по производной.
Критерий максимального быстродействия состоит в минимизации времени, за которое управляемый объект должен перейти в заданное состояние.
Этот критерий возник при зарождении вариационного исчисления (первая задача которого – задача о “брахистохроне”, кривой наискорейшего спуска, и была задачей быстродействия) и основное развитие получил при решении военных задач в 60-е гг. XX в., в которых быстродействие является принципиальным фактором.
В наиболее распространенном случае задача оптимизации по быстродействию сводится к получению переходного процесса, заканчивающегося в кратчайшее время. Будь то система управления ракетой или антенной радиолокационной станции, требуется, чтобы переходный процесс заканчивался в минимальное время. Дело в том, что до окончания переходного процесса система не может выполнить своего основного назначения следящей системы, например антенна радиолокационной станции не может следить за входным сигналом (рис. 5). Для этого случая в функционале
I =
необходимо положить
F(x, x’, t) =1
и, изменив xt, yx, y’x’, получить
I2 =
причем t0 соответствует начальным координатам процесса, а tk - конечным.
Наиболее распространено получение оптимального переходного процесса с включением максимального ускорения в начале с последующим переходом на максимальное торможение. В этом случае необходимо только определить момент переключения tn. Задача максимального быстродействия может возникнуть не обязательно в связи с переходным процессом следящих систем. Если, например, требуется за наименьшее время доставить летательный аппарат с Земли на Луну, то эта задача также сведется к задаче о максимальном быстродействии.
Критерий минимума стоимости в единицу времени – стоимость функционирования совокупности систем массового обслуживания в единицу времени.
Рис. 5. Система, оптимальная по быстродействию
В качестве другого примера функционала, встречающегося в практике проектирования оптимальных систем, можно привести стоимость функционирования совокупности систем массового обслуживания (или сети массового обслуживания) в единицу времени