Файл: 1. 1 Обоснование необходимости разработки мехатронной системы.doc
Добавлен: 26.10.2023
Просмотров: 435
Скачиваний: 13
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
СОДЕРЖАНИЕ
1.1 Обоснование необходимости разработки мехатронной системы
2.2 Подбор элементов мехатронной системы
3 Проектирование, конструирование технических средств
3.2 Выбор средств автоматизации и элементов управления
4.1 Описание пуско-наладки компонентов и модулей мехатронных систем
4.2 Разработка управляющей программы мехатронной системы
5.2. Расчет эксплуатационных затрат
5.3 Оценка экономической эффективности проектируемой системы
Список использованных источников
Для проверки работоспособности коммуникационной системы экскаватора необходимо выполнить следующие шаги:
-
Проверить настройки сетевого подключения. Убедитесь, что IP-адрес экскаватора находится в сети и что все необходимые сетевые параметры верны. -
Проверить доступность удаленных устройств. Используйте команду ping или другую программу для проверки доступности других устройств в сети, чтобы убедиться, что связь установлена и что нет проблем с перегруженными маршрутизаторами или обрывами в сети. -
Проверить кабельное соединение. Убедитесь, что сетевой кабель правильно подключен и не поврежден. -
Проверить работу приложений. Запустите приложения, используемые для управления экскаватором, и проверьте, что они успешно подключаются к экскаватору и могут управлять им. -
Проверить логи и сообщения об ошибках. Проверьте логи и сообщения об ошибках на экскаваторе или в приложении, чтобы выявить потенциальные проблемы и сообщить об них. -
Провести тестовую проверку связи. Если все еще есть сомнения в функциональности коммуникационной системы, можно провести тестовый запуск экскаватора и проверить, что все его функции работают правильно.
После того, как запуск и настройка систем закончена, экскаватор может начинать работу на карьере.
4.2 Разработка управляющей программы мехатронной системы
Блок-схема алгоритма работы программного обеспечения системы приведена на рисунке 13.
Регистрация данных осуществляется непосредственно с локальных ИДМ экскаватора, связь между ними и компьютером уровня АСУ ТП предлагается осуществлять по протоколу CAN или RS-485.
Хранение данных может осуществляться как в памяти ЭВМ, так и на специальном сервере, а в простейшем случае запись и хранение данных может осуществляться с помощью самописца на flash-карту. В последнем случае для доступа к данным требуется извлечь карту памяти из самописца и переписать ее содержимое на другой носитель информации. Использование сервера базы данных является наиболее сложным вариантом, однако позволяет организовать надежное хранение данных и, что самое главное, упрощает удаленный доступ к этим данным.
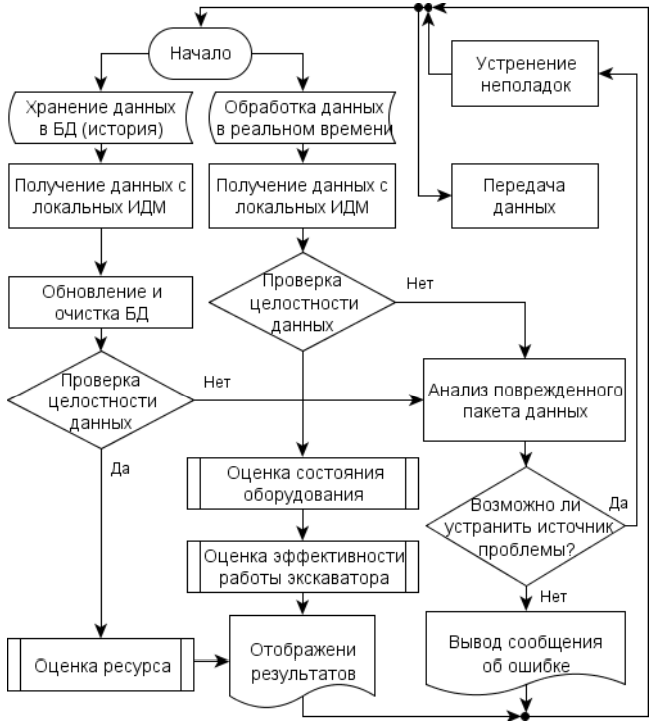
Рисунок 13 – Блок-схема работы системы «Электронный машинист»
Проверка целостности данных осуществляется в автоматическом в режиме на сетевом уровне взаимодействия АСУ ТП и локальных подсистем, однако, в зависимости от конкретного оборудования, возможность проверки данных может быть реализована и на прикладном уровне.
Автоматическая проверка оборудования в экскаваторе обычно осуществляется при помощи специального программного обеспечения, которое устанавливается на компьютере управления машиной. Это ПО контролирует работу различных систем и компонентов экскаватора, включая двигатель, гидравлику, систему охлаждения и др. На рисунке 13 показана блок-схема электропривода главного движения нового экскаватора.
Главная обратная связь замкнута по напряжению якорной обмотки двигателя постоянного тока. Внутренний подчиненный контур выполняет регулирование тока якорной обмотки двигателя. Регулирование выходного напряжения мостового транзисторного преобразователя управления двигателем осуществляется путем широтно-импульсной модуляции. Сигнал задания формируется с помощью устройства формирования сигнала управления приводами (УФСУП) с учетом ограничений положения ковша. Реальное положение ковша в пространстве вычисляется на основе сигналов энкодеров, установленных на лебедках приводов подъема и напора (тяги).
На основе данных, полученных от датчиков и других устройств, ПО может автоматически определять проблемы и предупреждать оператора об их наличии. Например, если давление в системе гидравлики становится ниже определенного порога, программа может выдать предупреждающую надпись на экране управления.
Кроме того, некоторые экскаваторы оснащены системами дистанционного мониторинга, которые позволяют инженерам и техническому персоналу издалека следить за работой машины и принимать меры в случае выявления неисправностей. Эти системы могут использоваться для уведомления оператора и технической поддержки о возможных неисправностях и необходимости ремонта.
При визуализации параметров линии электропередачи строятся временные диаграммы токов, напряжения и мощности. Дополнительно производится определение ЭДС, активного и реактивного сопротивлений линии, питающей экскаватор. На графиках красным цветом обозначается выход параметров за пределы диапазона нормальных значений. На рисунке 14 проиллюстрирована работа данной функции.
Разработанное ПО позволяет осуществлять поиск причин неисправностей, возникших в определенный момент времени. Для этого требуется указать программе момент времени, в который были замечены неполадки, выбрать одну из диагностических функций и запустить поиск неисправностей.
Панель управления GX-55 — это интуитивно понятный и простой в эксплуатации интерфейс для управления клавишами в форме тумблеров или джойстика.
Он имеет следующие разделы интерфейса:
-
Центральная часть главного экрана, на котором отображаются наиболее важные данные, такие как режим работы, давление в системе гидравлики, расход топлива и т.д. -
Рядом со средней частью располагается зона управления режимами работы, которую можно выбирать при помощи переключателей или кнопок. -
В нижней части экрана расположены кнопки управления, которые отвечают за изменение скорости движения экскаватора, модель двигателя и т.д. -
Боковые стороны панели управления могут быть предназначены для контроля элементов системы хладагента, воздушного фильтра, ручной тормозной системы и других аспектов работы машины. -
Большой дисплей позволяет оператору быстро получать информацию о состоянии машины и обнаруживать возможные проблемы.
Интерфейс панели управления GX-55 обладает высоким уровнем точности и бесперебойности действия. Кроме того, данная панель управления также оснащена алгоритмами автоматической диагностики и мониторинга, что позволяет оператору быстро реагировать на возможные проблемы и устранять их в кратчайшие сроки.
Панель управления GX-55 подключается к центральному компьютеру экскаватора. Этот компьютер обычно располагается в отдельной комнате управления машиной или внутри кабины оператора. На центральном компьютере установлено специальное программное обеспечение, которое обрабатывает данные, получаемые с панели управления GX-55.
Для подключения к компьютеру используется специальный кабель или разъем, который обычно расположен на задней стороне панели управления или на нижней части монтажной пластины.
Кроме того, GX-55 может также использовать беспроводные технологии для связи с центральным компьютером, такие как Bluetooth или Wi-Fi. Это позволяет оператору работать на расстоянии от машины и управлять ею из удаленного места.
5 Технико-экономическое обоснование
5.1 Расчет капитальных затрат
Капитальные затраты определяются по формуле:
К=Ко+Кпп+КСбыт.+ КПУ, (1)
где Ко - вложение средств в оборудование, руб;
Кпп - вложения в производственные помещения, руб;
Кбыт. - вложения в служебно-бытовые помещения, руб;
Кпу - вложения в комплект управляющих программ, руб.
Вложение средств в оборудование определяются по формуле:
Ко=Кто+Кпт+Кк, (2)
где Кто - вложения в технологическое оборудование, руб;
Кпт - вложения в подъемно-транспортное оборудование, руб;
Кк - вложения в средства контроля, руб.
Кто=Цто×Кт, (3)
где Цто - оптовая цена системы, руб;
Кт - коэффициент, учитывающий расходы на транспортировку Кт=1,1.
Расчет затрат на технологическое оборудование и комплектующие представлен в таблице 20
Таблица 20 - Расчет затрат на технологическое оборудование и комплектующие
| Наименование | Марка | Количество, шт. | Цена, руб. | Стоимость, руб. |
| Экскаватор гусеничный | PC200LC-1K | 1 | 8900000 | 8900000 |
| Счетчик импульсов | Пульсар | 1 | 10000 | 10000 |
| Контроллер | МС-Х1 | 1 | 3000 | 3000 |
| Панель управления | GX-55 | 1 | 75000 | |
| Спутниковая антенна | GR-i3 | 1 | 10000 | 10000 |
| Инерциальный датчик | TS-i4 | 1 | 2000 | 2000 |
| Радиоантенна | | 1 | 10000 | 10000 |
| Электромагнитный клапан | | 1 | 6000 | 6000 |
| Джойстики управления | JS-1 | 1 | 5000 | 5000 |
| Датчик тока и напряжения | GY-471 | 1 | 2000 | 2000 |
| Выключатель концевой | КУ-701 | 1 | 3000 | 3000 |
| Датчик скорости | E330B(С) | 1 | 1000 | 1000 |
| Предохранитель | УЗИс-С1-40 | 1 | 6000 | 6000 |
| Датчик озона | MQ131 | 1 | 5000 | 5000 |
| Датчик температурный | 700-101BAB | 1 | 1000 | 1000 |
| Датчик температуры ОЖ | Е-2317-2107 | 1 | 2000 | 2000 |
| Датчик угла наклона | SX305-T | 3 | 3500 | 10500 |
| Итого | | 20 | 9129500 | 9136500 |
| Монтаж - 10% | 913650 | |||
| Транспортные расходы 10% | 1005015 | |||
| Всего Кто | 11055165 | |||