Файл: 1. 1 Обоснование необходимости разработки мехатронной системы.doc
Добавлен: 26.10.2023
Просмотров: 421
Скачиваний: 13
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
СОДЕРЖАНИЕ
1.1 Обоснование необходимости разработки мехатронной системы
2.2 Подбор элементов мехатронной системы
3 Проектирование, конструирование технических средств
3.2 Выбор средств автоматизации и элементов управления
4.1 Описание пуско-наладки компонентов и модулей мехатронных систем
4.2 Разработка управляющей программы мехатронной системы
5.2. Расчет эксплуатационных затрат
5.3 Оценка экономической эффективности проектируемой системы
Список использованных источников
, который является одним из наиболее распространенных контроллеров в России. Он используется для автоматизации и управления многими промышленными устройствами и системами.
Автономный контроллер МС-Х1 был выбран по ряду причин. Обладая Wi-Fi каналом связи, он может эксплуатироваться без надобности спутниковой связи. Также возможна связь через сеть Интернет. Также стоит отметить то, что контроллер является сборочным
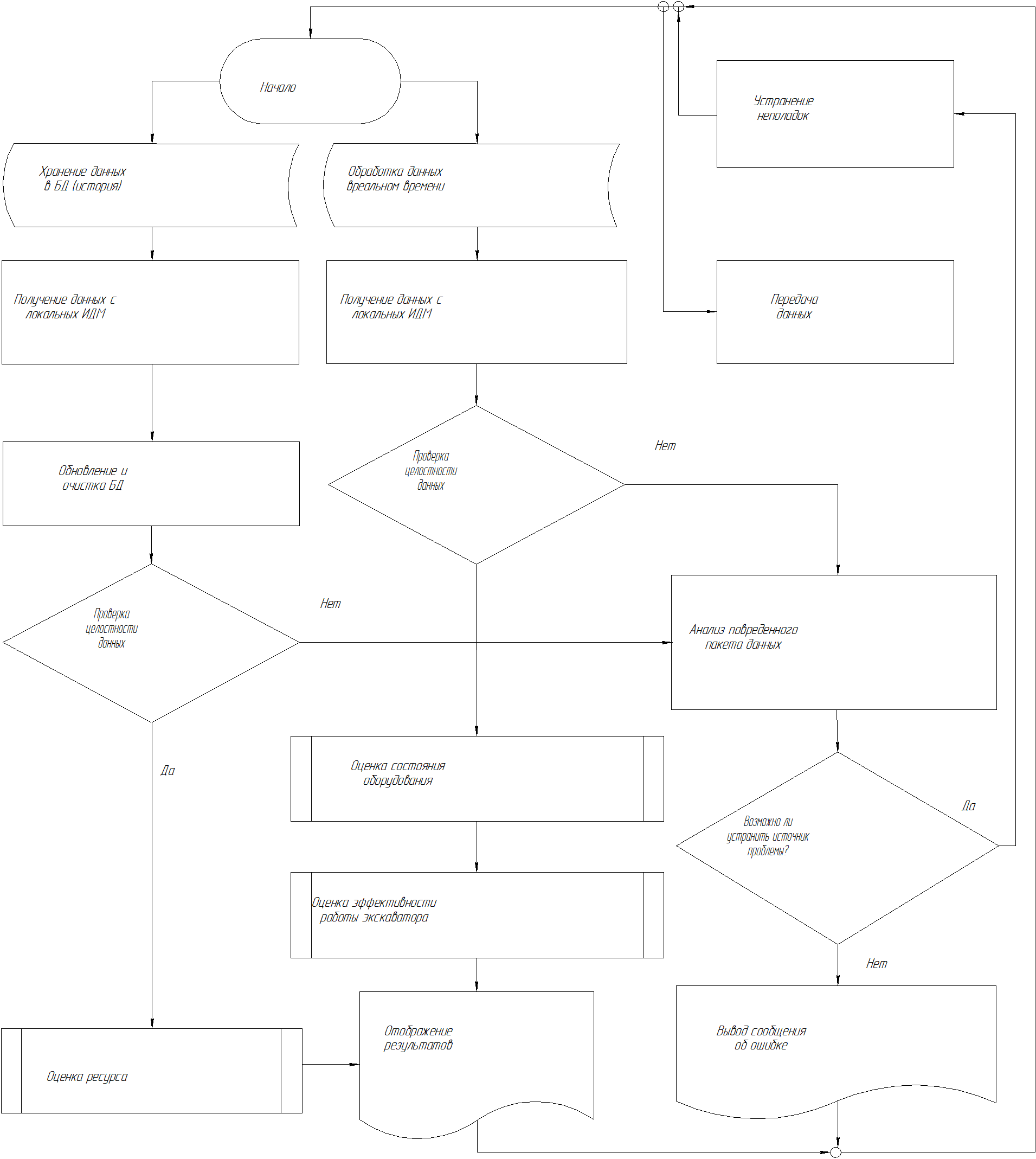
Проверка целостности данных осуществляется в автоматическом режиме на сетевом уровне взаимодействия АСУ ТП и локальных подсистем,
Автоматическая проверка оборудования в экскаваторе обычно осуществляется при помощи специального программного обеспечения, которое устанавливается на компьютере управления машиной. Это ПО контролирует работу различных систем и компонентов экскаватора, включая двигатель, гидравлику, систему охлаждения и др.
Экскаваторы с телекоммуникационной системой применяются горнодобывающей промышленности при добыче ископаемых на карьерах, для земляных работ для различных инфраструктур в строительстве и пр.
Итоговая сумма вложений составила 10165522 рублей.
Срок окупаемости составил 0,6 лет
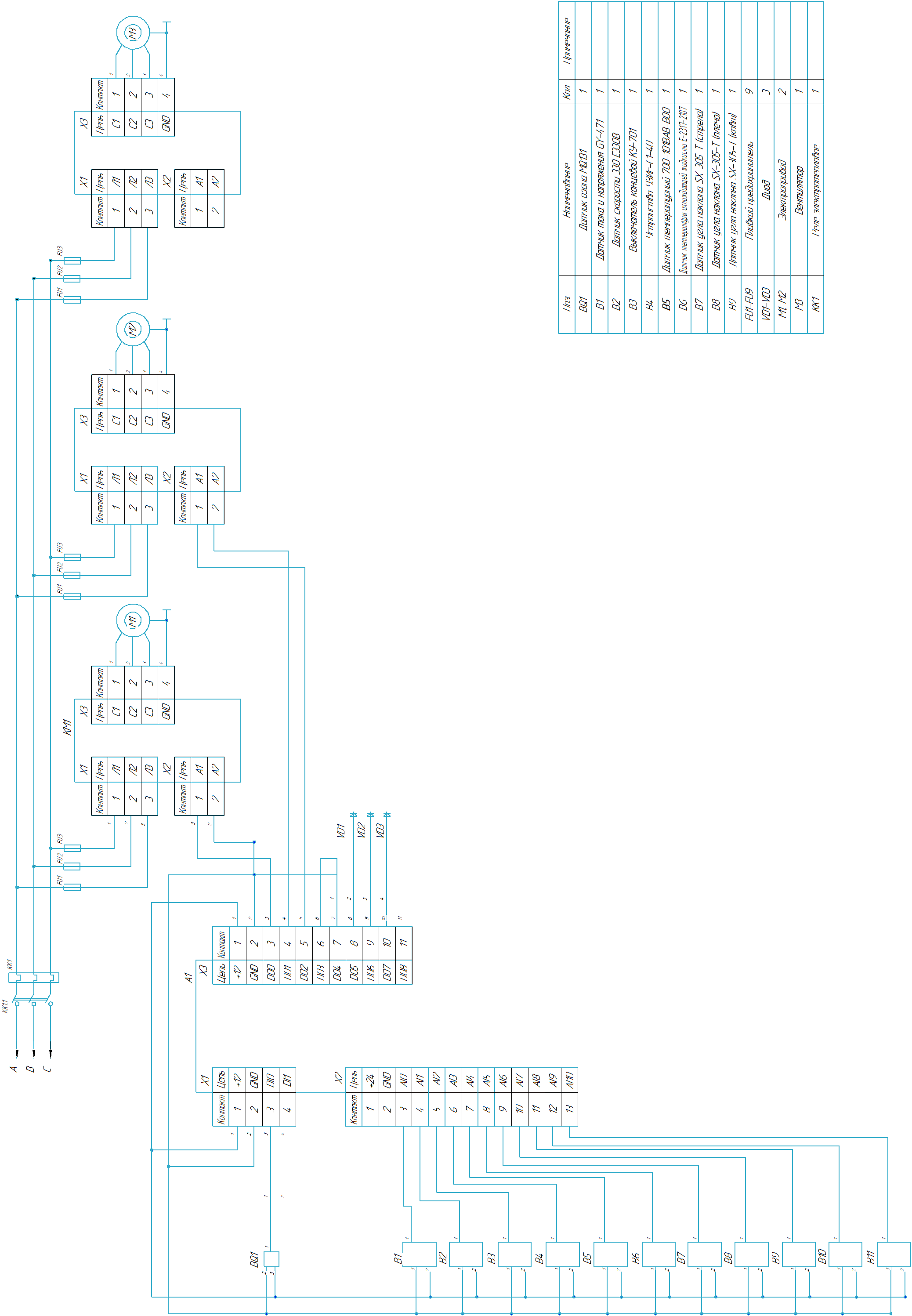
Приложение Б. Схема электрическая принципиальная
Автономный контроллер МС-Х1 был выбран по ряду причин. Обладая Wi-Fi каналом связи, он может эксплуатироваться без надобности спутниковой связи. Также возможна связь через сеть Интернет. Также стоит отметить то, что контроллер является сборочным
Проверка целостности данных осуществляется в автоматическом режиме на сетевом уровне взаимодействия АСУ ТП и локальных подсистем,
Автоматическая проверка оборудования в экскаваторе обычно осуществляется при помощи специального программного обеспечения, которое устанавливается на компьютере управления машиной. Это ПО контролирует работу различных систем и компонентов экскаватора, включая двигатель, гидравлику, систему охлаждения и др.
Экскаваторы с телекоммуникационной системой применяются горнодобывающей промышленности при добыче ископаемых на карьерах, для земляных работ для различных инфраструктур в строительстве и пр.
Итоговая сумма вложений составила 10165522 рублей.
Срок окупаемости составил 0,6 лет
Список использованных источников
-
Башмаков А.И., Башмаков И.А. Интеллектуальные информационные технологии: Учеб. пособие. – М.: Изд-во МГТУ им. Н.Э. Баумана, 2018.
-
Вуль Ю.Я., Ключев В.И., Седаков Л.В. Наладка электроприводов экскаваторов. Изд. 2, перераб. и доп. М.: Недра. 2019.
-
Гафурьянов Р.Г., Комиссаров А.П., Шестаков В.С. Моделирование рабочего процесса экскаваторов / Горное оборудование и электромеханика. 2019.
-
Единое информационное пространство – Life-Prog [Электронный ресурс] (Дата обращения: 19.07.2020).
- Ефременков А.Б. Горные машины и оборудование. Введение в специальность. Часть I: учебное пособие / А.Б. Ефременко, А.А. Казанцев, М.Ю. Блащук. – Томск: Изд-во Томского политехнического университета, 2019.
- Интеллектуальный карьер. Будущее горных технологий. VIST Mining Technology [Электронный ресурс] (Дата обращения: 20.07.2018).
-
Кабышев А. В., Тарасов Е. В. Низковольтные автоматические выключатели. Томск. Изд. Томского политехнического университета, 2019.
-
Кулешов А.А. Мощные экскаваторно-автомобильные комплексы карьеров. М.: Недра, 2020.
-
Малафеев С.И. Тихонов Ю.В. Автоматизация диагностики электрооборудования горных машин на основе моделирования рабочих процессов // Автоматизация в промышленности. – 2019.
-
Малафеев С.И., Анучин А.В., Серебренников Н.А. Экскаватор ЭШ-11/75: Новая система управления приводами // Горное оборудование и электромеханика. – 2020.
-
Малафеев С.И., Копейкин А.И. Надежность технических систем. Примеры и задачи. – СПб.: Лань, 2017.
-
Малафеев С.И., Малафеева А.А. Основы автоматики и системы автоматического управления. – М.: Академия, 2019.
- Малафеев С.И., Новгородов А.А., Серебренников Н.А. Новый экскаватор ЭКГ-18Р: система приводов постоянного тока с широтно-импульсной модуляцией // Горное оборудование и электромеханика. – 2018.
-
Малафеев С.И., Тихонов Ю.В. Компоненты интеллектуального управления для СПИСОК ЛИТЕРАТУРЫ карьерных экскаваторов // Автоматизация в промышленности. – 2019.
- Тихонов Ю.В. Разработка программного комплекса для интеллектуального экскаватора / XXXIX Международная молодежная научная конференция «Гагаринские чтения». Научные труды международной молодежной научной конференции в 8-ми т. Т. 1. – М.: МАТИ, 2019.
-
Трубецкой К.Н., Кулешов А.А., Клебанов А.Ф., Владимиров Д.Я. Современные системы управления горнотранспортными комплексами. – СПб., Наука, 2017.
-
Бочаров, В.В. Управление денежным оборотом предприятий и корпораций / В.В. Бочаров. Москва: Финансы и статистика, 2017.
-
Гинзбург, А. И. Экономический анализ / А. И. Гинзбург. – СПб.: Питер, 2017.
-
Герасименко, Г. П. Управленческий, финансовый и инвестиционный анализ / Г. П. Герасименко. – М.: Инфра, 2018.
-
Любушин, Н.П. Экономический анализ.: Учебник для студентов вузов / Н.П. Любушин. – М.: ЮНИТИ-ДАНА, 2019.
-
57. Мельник, М.В. Экономический анализ в аудите: Учебное пособие для студентов вузов / М.В. Мельник, В.Г. Когденко. – М.: ЮНИТИ-ДАНА, 2018.
ПРИЛОЖЕНИЯ
Приложение А. Блок-схема алгоритма работы экскаватора
Приложение Б. Схема электрическая принципиальная