Файл: 1. 1 Обоснование необходимости разработки мехатронной системы.doc
Добавлен: 26.10.2023
Просмотров: 428
Скачиваний: 13
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
СОДЕРЖАНИЕ
1.1 Обоснование необходимости разработки мехатронной системы
2.2 Подбор элементов мехатронной системы
3 Проектирование, конструирование технических средств
3.2 Выбор средств автоматизации и элементов управления
4.1 Описание пуско-наладки компонентов и модулей мехатронных систем
4.2 Разработка управляющей программы мехатронной системы
5.2. Расчет эксплуатационных затрат
5.3 Оценка экономической эффективности проектируемой системы
Список использованных источников
Содержание
Введение 3
1Общая часть 5
1.1 Обоснование необходимости разработки мехатронной системы 5
1.2Характеристика мехатронной системы 6
2Выбор и обоснование проектных решений 12
2.1Разработка технологической карты монтажа мехатронной системы 12
2.2 Подбор элементов мехатронной системы 15
3 Проектирование, конструирование технических средств 24
3.1 Выбор контроллера 25
3.2 Выбор средств автоматизации и элементов управления 28
4 Организационная часть 33
4.1 Описание пуско-наладки компонентов и модулей мехатронных систем 33
4.2 Разработка управляющей программы мехатронной системы 39
5 Технико-экономическое обоснование 44
5.1 Расчет капитальных затрат 44
Вложения средств в подъемно-транспортное оборудование определяется по формуле: 45
Вложения в средства контроля определяется по формуле: 45
Расчет вложений на бытовые помещения 46
Расчет фонда заработной платы монтажникам (программистам) 46
5.2. Расчет эксплуатационных затрат 47
Расчет списочной численности диспетчерского персонала 47
Расчет фонда заработной платы определяется по формуле: 47
Амортизация оборудования определяется по формуле: 47
Косвенные расходы представлены в таблицах 23, 24, 25. 48
5.3 Оценка экономической эффективности проектируемой системы 48
Эффективность за счет предотвращения ущерба у потребителей благодаря применению средств автоматизации определяется по формуле: 48
Эффект от применения АСУ определяется по формуле: 49
Годовая экономия эксплуатационных затрат представлены в таблице 26 49
Срок окупаемости затрат определяются по формуле 50
Коэффициент экономической эффективности определяется по формуле: 50
Заключение 51
Список использованных источников 53
1.Башмаков А.И., Башмаков И.А. Интеллектуальные информационные технологии: Учеб. пособие. – М.: Изд-во МГТУ им. Н.Э. Баумана, 2018. 53
2.Вуль Ю.Я., Ключев В.И., Седаков Л.В. Наладка электроприводов экскаваторов. Изд. 2, перераб. и доп. М.: Недра. 2019. 53
3.Гафурьянов Р.Г., Комиссаров А.П., Шестаков В.С. Моделирование рабочего процесса экскаваторов / Горное оборудование и электромеханика. 2019. 53
4.Единое информационное пространство – Life-Prog [Электронный ресурс] (Дата обращения: 19.07.2020). 53
5.Ефременков А.Б. Горные машины и оборудование. Введение в специальность. Часть I: учебное пособие / А.Б. Ефременко, А.А. Казанцев, М.Ю. Блащук. – Томск: Изд-во Томского политехнического университета, 2019. 53
6.Интеллектуальный карьер. Будущее горных технологий. VIST Mining Technology [Электронный ресурс] (Дата обращения: 20.07.2018). 53
7.Кабышев А. В., Тарасов Е. В. Низковольтные автоматические выключатели. Томск. Изд. Томского политехнического университета, 2019. 53
8.Кулешов А.А. Мощные экскаваторно-автомобильные комплексы карьеров. М.: Недра, 2020. 53
9.Малафеев С.И. Тихонов Ю.В. Автоматизация диагностики электрооборудования горных машин на основе моделирования рабочих процессов // Автоматизация в промышленности. – 2019. 54
10.Малафеев С.И., Анучин А.В., Серебренников Н.А. Экскаватор ЭШ-11/75: Новая система управления приводами // Горное оборудование и электромеханика. – 2020. 54
11.Малафеев С.И., Копейкин А.И. Надежность технических систем. Примеры и задачи. – СПб.: Лань, 2017. 54
12.Малафеев С.И., Малафеева А.А. Основы автоматики и системы автоматического управления. – М.: Академия, 2019. 54
13.Малафеев С.И., Новгородов А.А., Серебренников Н.А. Новый экскаватор ЭКГ-18Р: система приводов постоянного тока с широтно-импульсной модуляцией // Горное оборудование и электромеханика. – 2018. 54
14.Малафеев С.И., Тихонов Ю.В. Компоненты интеллектуального управления для СПИСОК ЛИТЕРАТУРЫ карьерных экскаваторов // Автоматизация в промышленности. – 2019. 54
15.Тихонов Ю.В. Разработка программного комплекса для интеллектуального экскаватора / XXXIX Международная молодежная научная конференция «Гагаринские чтения». Научные труды международной молодежной научной конференции в 8-ми т. Т. 1. – М.: МАТИ, 2019. 54
16.Трубецкой К.Н., Кулешов А.А., Клебанов А.Ф., Владимиров Д.Я. Современные системы управления горнотранспортными комплексами. – СПб., Наука, 2017. 54
17.Бочаров, В.В. Управление денежным оборотом предприятий и корпораций / В.В. Бочаров. Москва: Финансы и статистика, 2017. 54
18.Гинзбург, А. И. Экономический анализ / А. И. Гинзбург. – СПб.: Питер, 2017. 54
19.Герасименко, Г. П. Управленческий, финансовый и инвестиционный анализ / Г. П. Герасименко. – М.: Инфра, 2018. 55
20.Любушин, Н.П. Экономический анализ.: Учебник для студентов вузов / Н.П. Любушин. – М.: ЮНИТИ-ДАНА, 2019. 55
21.57. Мельник, М.В. Экономический анализ в аудите: Учебное пособие для студентов вузов / М.В. Мельник, В.Г. Когденко. – М.: ЮНИТИ-ДАНА, 2018. 55
ПРИЛОЖЕНИЯ 56
Приложение А. Блок-схема алгоритма работы экскаватора 4
4
Введение
Интеллектуализация стала неизбежной тенденцией в развитии строительной техники. Запуск интеллектуального роботизированного экскаватора для совместной работы не только представляет собой последний результат в области взаимодействия человека и машины, но и является новым прорывом для их взаимодействия.
Экскаватор-робот с искусственным интеллектом призван повысить эффективность строительства и снизить риски при работе на опасных участках. Кроме того, применение машины в автоматическом режиме позволит снизить эксплуатационные затраты.
Тема дипломного проекта – монтаж, программирование и пуско-наладка мехатронной системы интеллектуального экскаватора.
Цель работы: описать монтаж, программирование и пуско-наладку мехатронной системы управления интеллектуальным экскаватором.
Задачи:
- описать технические характеристики интеллектуального экскаватора;
- объяснить функционирование мехатронной системы;
- обозначить управляющие элементы;
- подобрать элементы мехатронной системы;
- описать монтаж и пуско-наладочные работы.
- оценить экономическую эффективность системы
Актуальность работы: Добыча полезных ископаемых – приоритетная отрасль российской промышленности, являющаяся основой стабильности экономики страны. Развитие отрасли происходит под влиянием практических потребностей и совершенствования технологий.
Для эффективного освоения сырьевой базы страны требуется адекватная мехатронная техника, позволяющая решать задачу добычи полезных ископаемых при постепенном снижении непосредственного участия человека в технологическом процессе, одновременном повышении надежности техники и увеличении объемов добычи.
Повышение уровня автоматизации мехатронного комплекса карьерного экскаватора предполагает использование методов искусственного интеллекта и новых информационных технологий, что необходимо для интеграции мехатронного комплекса в единое информационное пространство горного предприятия. Специфические особенности открытых горных работ, такие как тяжелые условия эксплуатации карьерных машин, сложные климатические условия, передвижные линии электропитания и перемещение фронта работ, ограничивают
непосредственное использование технических решений, которые эффективно применяются в других областях техники.
Уникальность экскаваторной техники определяет необходимость специального индивидуального подхода к информатизации и интеллектуализации мехатронных комплексов горных машин.
Интеллектуальный экскаватор применяется в бесперебойных работах карьерного комплекса.
-
Общая часть
1.1 Обоснование необходимости разработки мехатронной системы
Добыча полезных ископаемых – приоритетная отрасль российской промышленности, являющаяся основой стабильности экономики страны. Развитие отрасли происходит под влиянием практических потребностей и совершенствования технологий.
Для эффективного освоения сырьевой базы страны требуется адекватная мехатронная техника, позволяющая решать задачу добычи полезных ископаемых при постепенном снижении непосредственного участия человека в технологическом процессе, одновременном повышении надежности техники и увеличении объемов добычи.
К основным машинам, предназначенным для ведения открытых горных работ, относятся буровые станки, экскаваторы и транспортные машины, которые, с точки зрения мехатроники, представляют собой мехатронные комплексы.
В настоящей дипломной работе под мехатронным комплексом понимается совокупность мехатронных систем, направленная на решение единой задачи управления с учетом критериев эффективности и надежности.
Дальнейшее развитие карьерной техники связано с созданием интеллектуального горного производства, отличающегося высоким уровнем организации процессов управления, что обеспечивает повышение надежности и эффективности работы машин, повышение безопасности проведения горных работ, а также снижение влияния человеческого фактора и доли ручного труда вплоть до полной роботизации горной техники.
Повышение уровня автоматизации мехатронного комплекса карьерного экскаватора предполагает использование методов искусственного интеллекта и новых информационных технологий, что необходимо для интеграции мехатронного комплекса в единое информационное пространство горного предприятия. Специфические особенности открытых горных работ, такие как тяжелые условия эксплуатации карьерных машин, сложные климатические условия, передвижные линии электропитания и перемещение фронта работ, ограничивают непосредственное использование технических решений, которые эффективно применяются в других областях техники.
Уникальность экскаваторной техники определяет необходимость специального индивидуального подхода к информатизации и интеллектуализации мехатронных комплексов горных машин.
-
Характеристика мехатронной системы
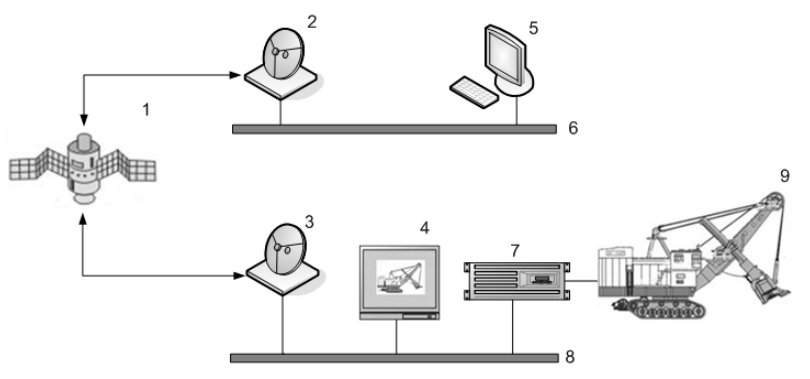
На рисунке 1 представлена схема современной телекоммуникационной системы карьерного экскаватора, оснащенного информационно-диагностической системой «ПУЛЬСАР-7».
В данной системе возможность удаленного доступа реализована двумя способами:
- с использованием проприетарного ПО «ПУЛЬСАР-7»;
- с использованием программного обеспечения Team Viewer.
-
Рисунок 1 - Структурная схема телекоммуникационной системы карьерного экскаватора, оснащенного информационно - диагностической системой ПУЛЬСАР-7 -
1 – спутник связи, -
2,3 – спутниковые приемопередатчики, -
4 – информационная панель, -
5 – удаленный компьютер, -
6,8 – шина данных, -
7 – устройство сопряжения, -
9 – экскаватор
Обработка данных осуществляется центральным компьютером NISE-3500-i5520M. Компьютер интеллектуального экскаватора используется для автоматизации и оптимизации процесса работы экскаватора. Он позволяет управлять работой машины с помощью специальных программ, которые учитывают геометрические параметры объекта, на котором проводятся работы, и позволяют максимально эффективно использовать ресурсы машины. Кроме того, компьютер интеллектуального экскаватора может использоваться для мониторинга и анализа производительности машины, что позволяет оптимизировать ее работу и увеличить производительность. Его характеристики представлены в таблице 1:
Таблица 1 – Основные характеристики центрального компьютера
| Наименование | Показатель |
| Тип процессора | Intel Core i5 M |
| Тактовая частота процессора, ГГц | 2,4 |
| Системный чип | Intel QM57 |
| Оперативная память | 4 Гб, DDR3 |
| Количество портов Gigabit Ethernet | 2 |
| Количество портов USB 2.0 | 6 |
| Интерфейс подключения монитора | VGA, DVI |
| Интерфейс подключения клавиатуры и мыши | USB |
| Аудио входы и выходы | присутствуют |
| Интерфейс подключения жесткого диска | SATA 2 |
| Возможность установки SSD диска | присутствует |
| Материал корпуса | металл |
| Способ охлаждения | пассивный |
| Электропитание | сеть постоянного тока |
| Напряжение питания, В | 9…30 |