Файл: Методическое пособие по дисциплине методы оптимальных решений 1 семестр Направление подготовки 080100 Экономика.doc
ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 30.10.2023
Просмотров: 163
Скачиваний: 2
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
Так как в столбце вектора Р0 таблицы 17 стоит отрицательное число -7, то рассмотрим элементы 2-й строки. Среди этих чисел есть одно отрицательное -3/2. Если бы такое число отсутствовало, то исходная задача была бы неразрешима. В данном случая переходим к новой симплекс-таблице (табл. 18).
Таблица 18
| i | Базис | Сб | Р0 | 1 | 1 | 2 | 0 | 0 |
| | | | | P1 | P2 | P3 | p4 | p5 |
| 1 2 3 4 | p3 P1 p2 | 2 1 1 | 8/3 14/3 2/3 32/3 | 0 1 0 0 | 0 0 1 0 | 1 0 0 0 | 1/3 -2/3 1/3 1/3 | 2/3 -1/3 -1/3 2/3 |
Как видно из таблицы 18, найдены оптимальные планы исходной и двойственной задач. Ими являются
1.17. Найти максимальное значение функции
Решение. Умножая первое и третье уравнения системы ограничений задачи на -1, в результате приходим к задаче нахождения максимального значения функции
Взяв в качестве базиса векторы Р3, Р4 и Р5, составляем симплекс-таблицу (табл. 19).
Таблица 19
| i | Базис | Сб | Р0 | 2 | 3 | 0 | 5 | 0 |
| | | | | P1 | P2 | P3 | p4 | p5 |
| 1 2 3 4 | p3 P4 p5 | 0 5 0 | -12 10 -18 50 | 2 1 -3 3 | -1 2 2 7 | 1 0 0 0 | 0 1 0 0 | 0 0 1 0 |
В 4-й строке таблице 19 нет отрицательных чисел. Следовательно, если бы в столбце вектора Р0 не было отрицательных чисел, то в таблице 19 был бы записан оптимальный план. Поскольку в указанном столбце отрицательные числа имеются и такие же числа содержатся в соответствующих строках, переходим к новой симплекс-таблице (таблица 20). Для этого исключим из базиса вектор Р5 и введем в базис вектор Р1. В результате получим псевдоплан
Таблица 20
| i | Базис | Сб | Р0 | 2 | 3 | 0 | 5 | 0 |
| | | | | P1 | P2 | P3 | p4 | p5 |
| 1 2 3 4 | p3 P4 p1 | 0 5 2 | -24 4 6 32 | 0 0 1 0 | 1/3 8/3 -2/3 9 | 1 0 0 0 | 0 1 0 0 | 2/3 1/3 -1/3 1 |
Так как в строке вектора Р3 нет отрицательных чисел, то исходная задача не имеет решения.
Построение математических моделей. Решение задачи оптимального распределения ресурсов в среде EXCEL
Цель занятия: знакомство студентов с задачами линейного программирования.
Задачи занятия:
- изучение формы моделей задачи линейного программирования (ЗЛП);
- получение навыка решения ЗЛП в среде EXCEL
Методические указания
.



R=
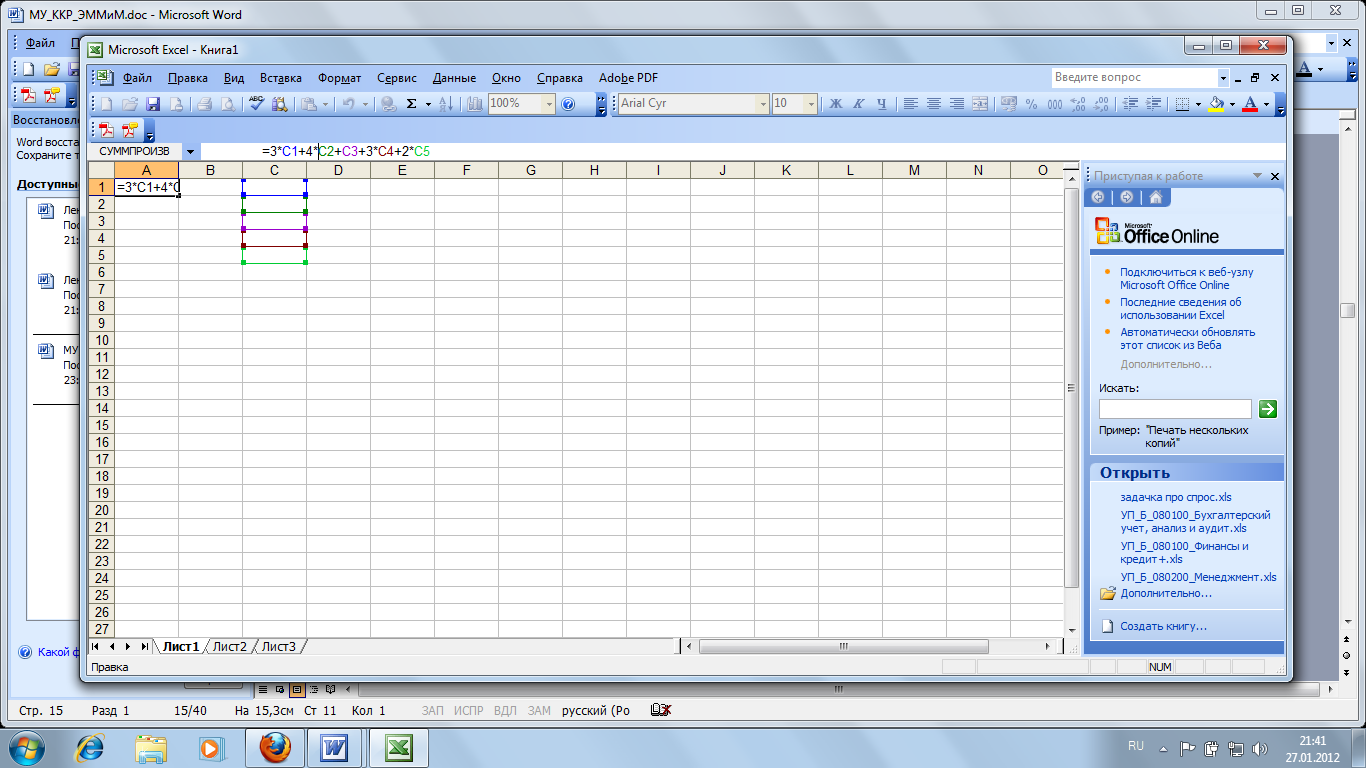
В ячейке А1 введем целевую функцию, в ячейках С1-5 задавая неизвестные пока значения переменных целевой функции:
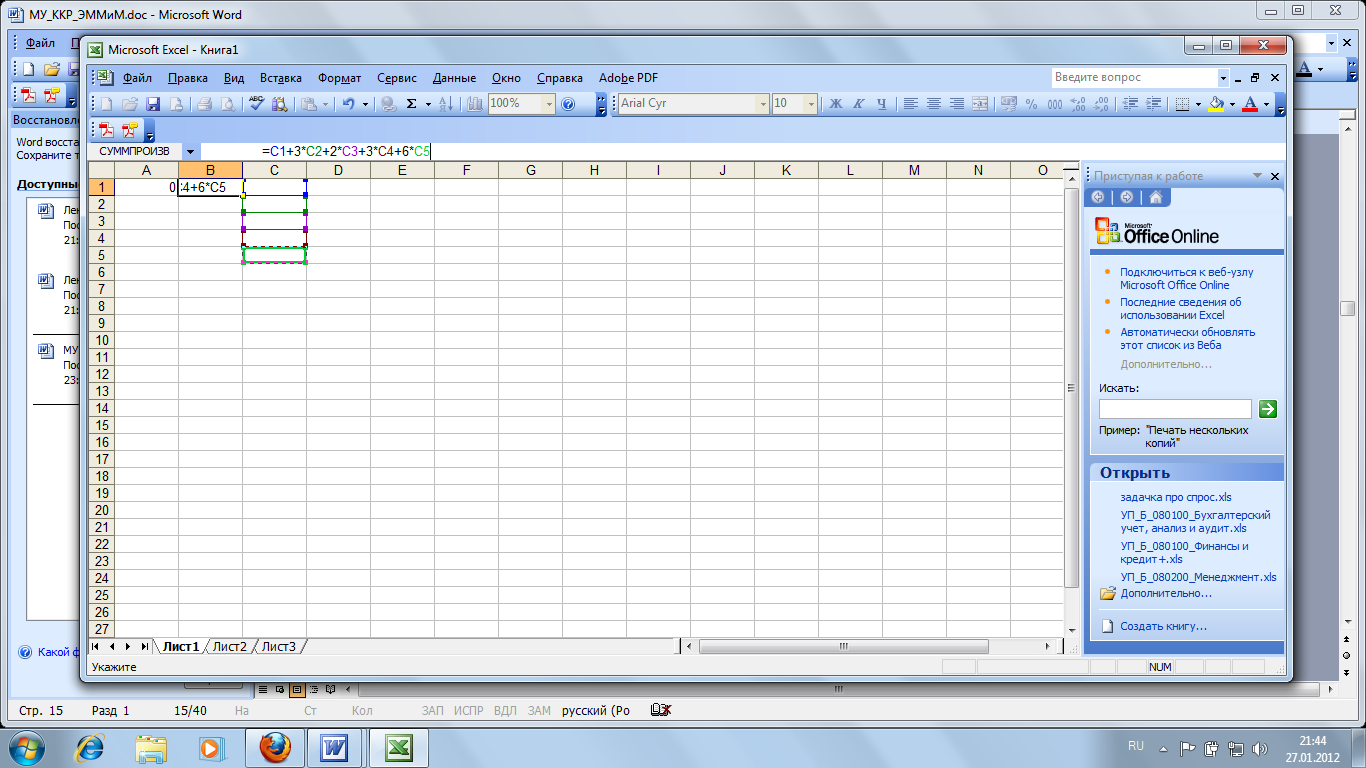
В ячейке В задаем левые части неравенств системы ограничений:
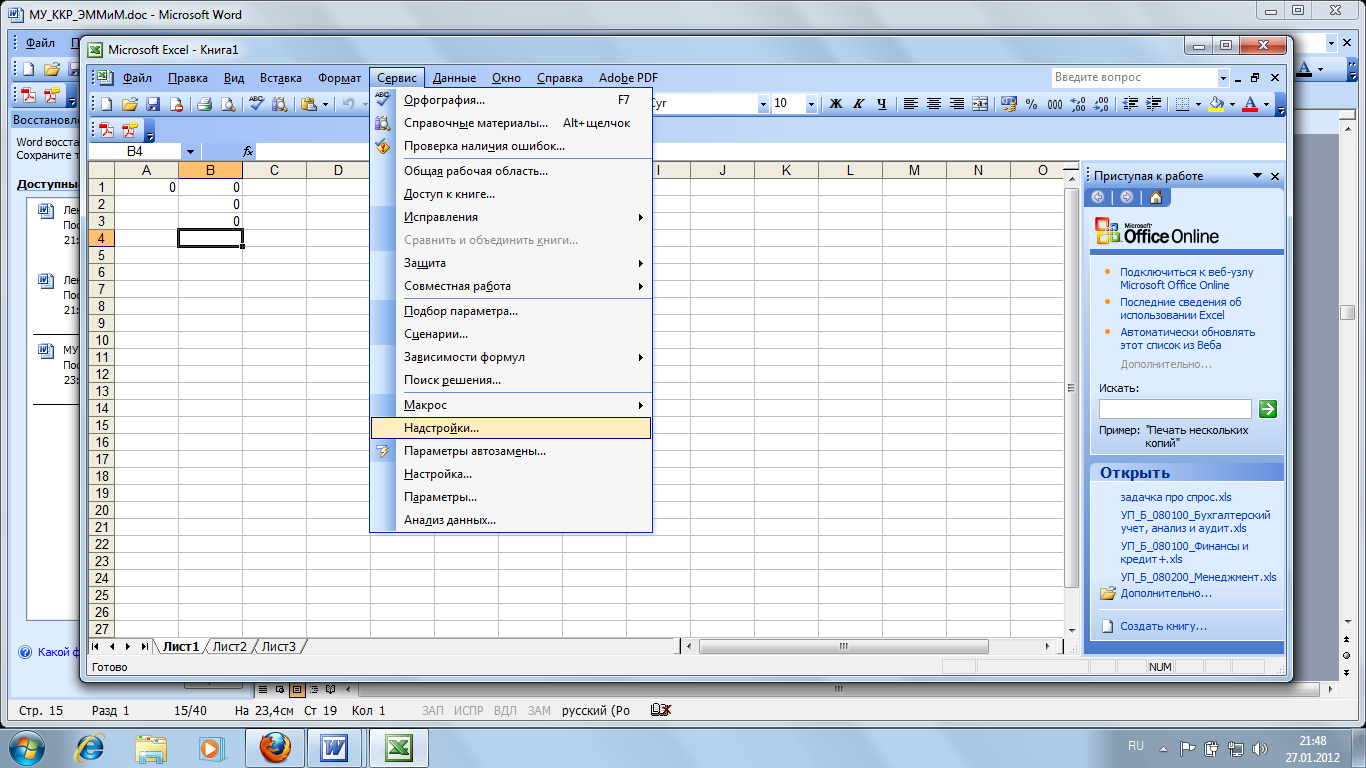
Через СЕРВИС/НАДСТРОЙКИ установить Поиск решения:
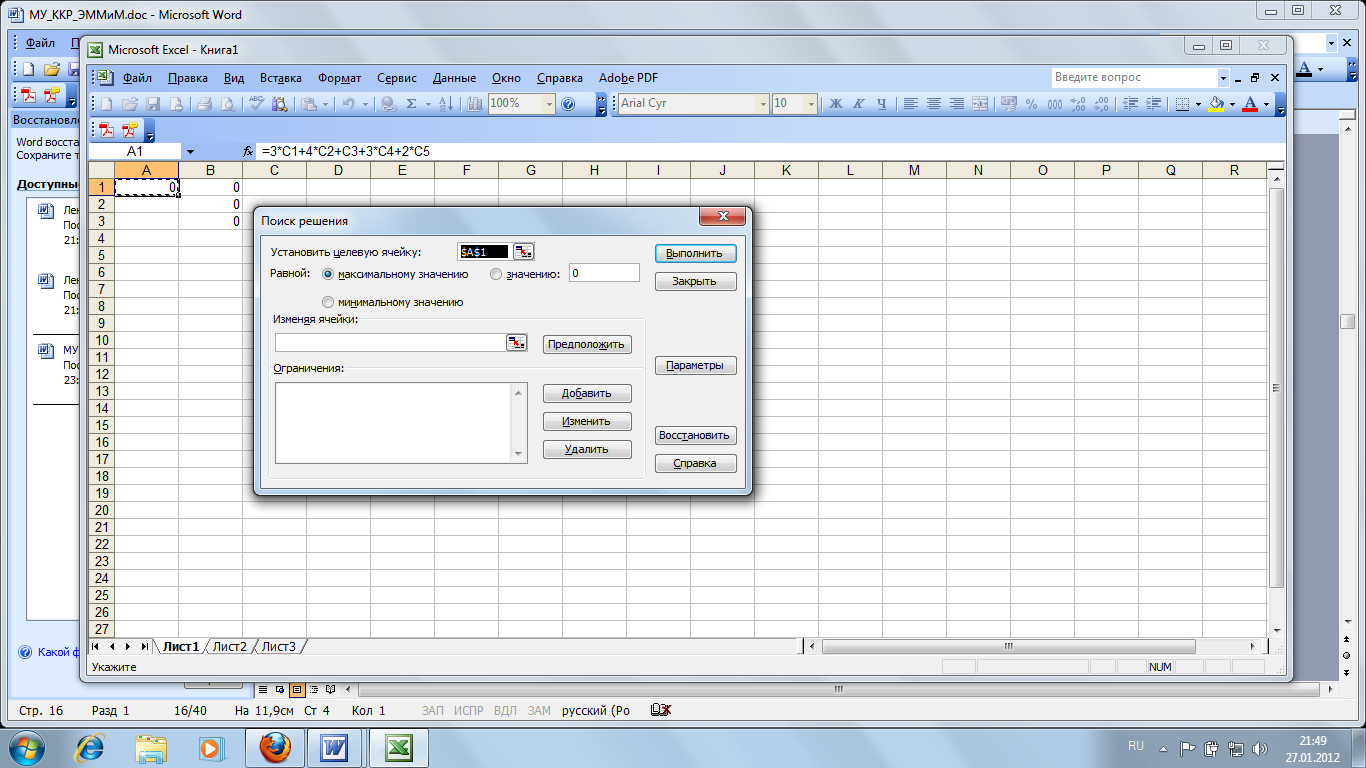
Через СЕРВИС/ПОИСК РЕШЕНИЯ открыть окно поиска решения и выбрать А1 целевой ячейкой:
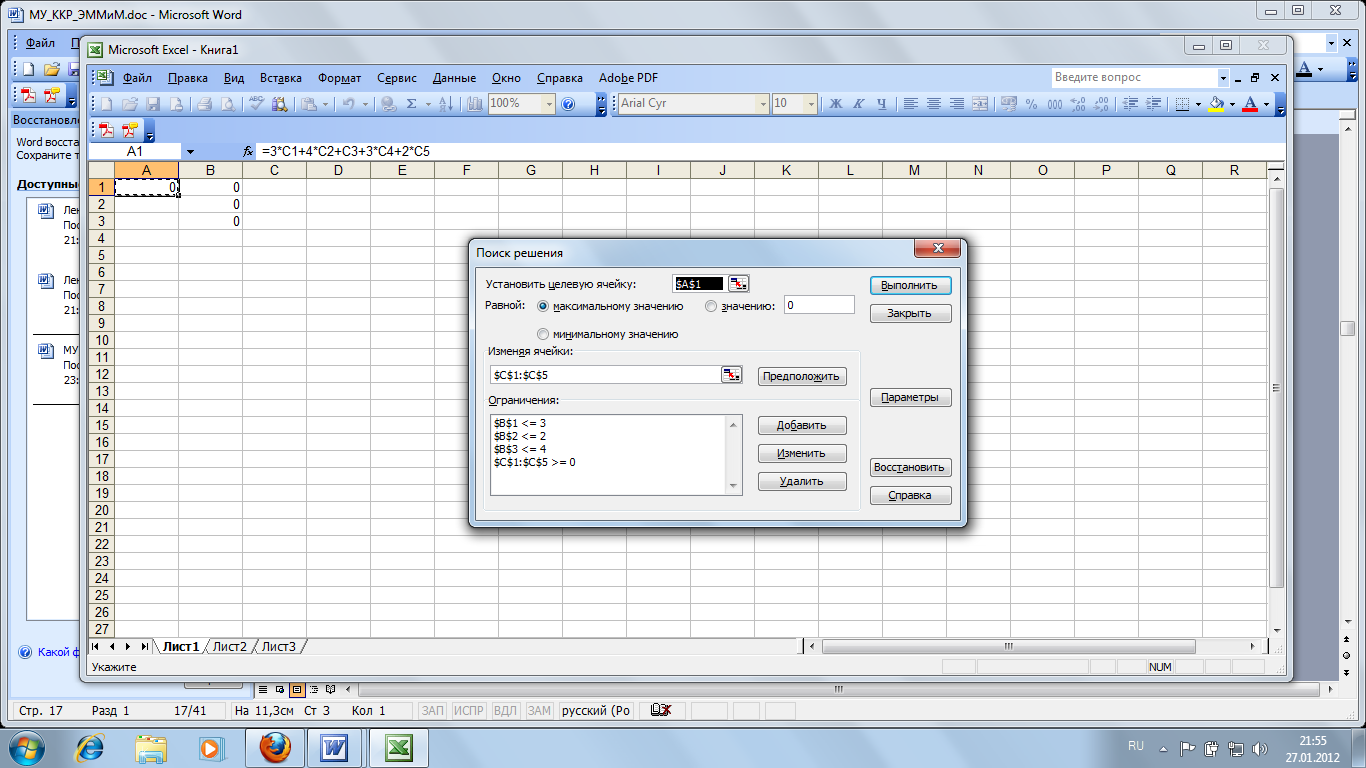
В окне «Изменяя ячейки» выбираем С1-С5 и вводим ограничения (кнопка ДОБАВИТЬ):
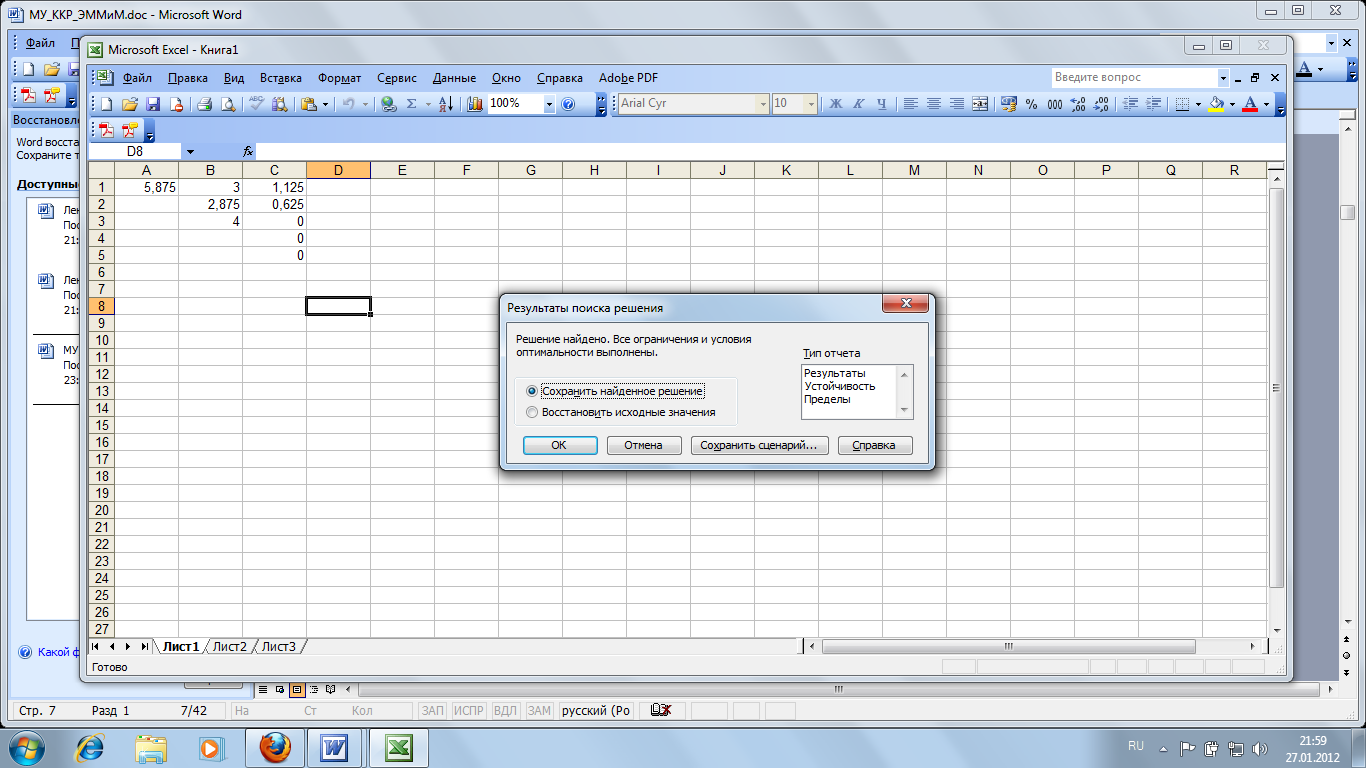
Нажав кнопку ВЫПОЛНИТЬ, получим решение:
Графический метод решения ПЗЛП
Задачи:
- изучение алгоритма графического метода решения ЗЛП;
- получение практического навыка решения ЗЛП графическим методом.
Методические указания
Рассмотрим следующую задачу линейного программирования1:
На рис. 4.1 представлено множество допустимых точек, удовлетворяющих всем ограничениям задачи и представляющее собой пересечение полуплоскостей, отражающих ограничения задачи линейного программирования.
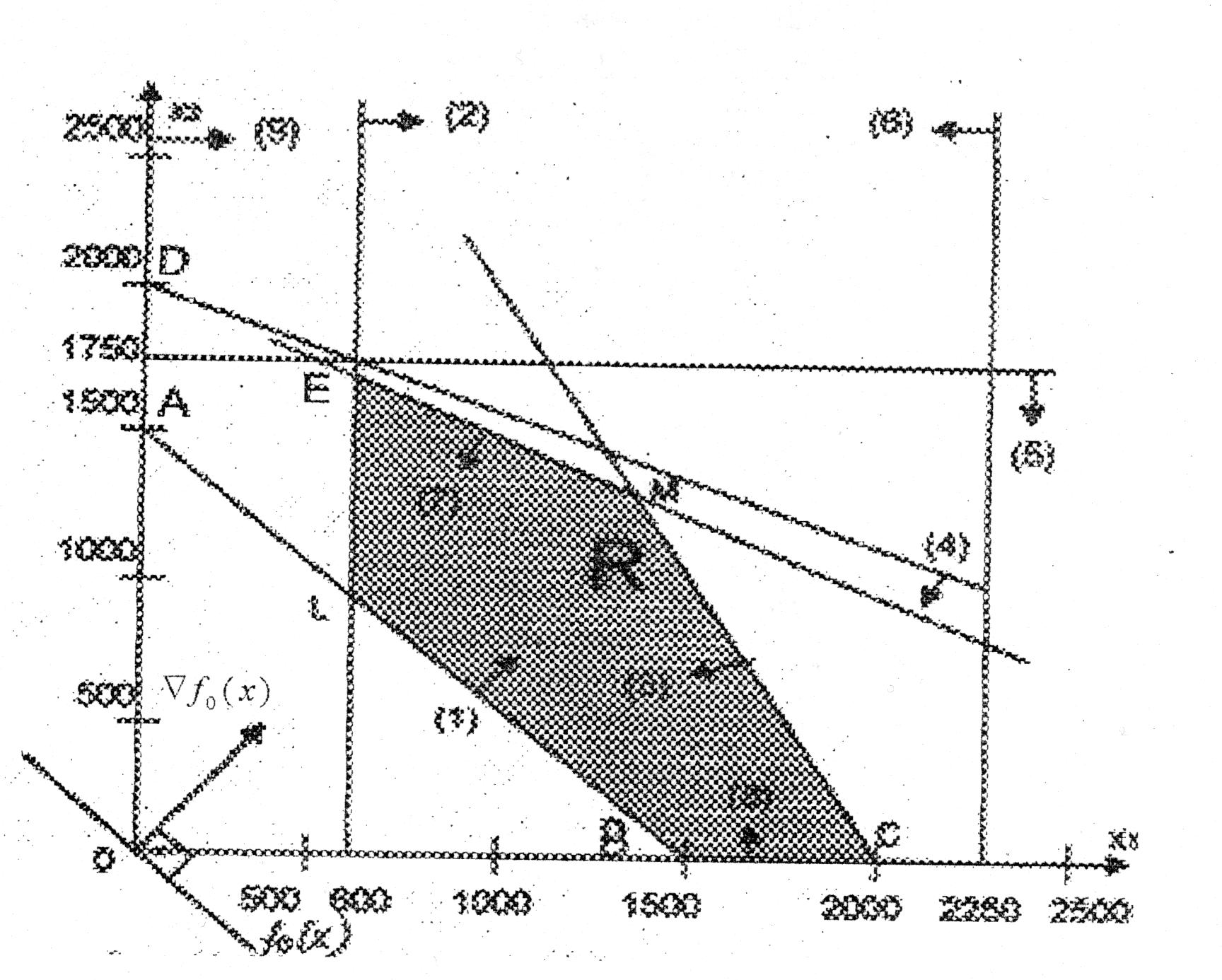
Рис. 4.1. Геометрическая интерпретация решения задачи
Геометрическую интерпретацию имеют ЗЛП с двумя переменными.
Исследуем целевую функцию 30х1 + 40х2. Данной целевой функции соответствует семейство прямых 30
х1 + 40х2 = L, представляющих собой множество параллельных прямых, каждая из которых соответствует определенному значению параметра L. Тогда задачу линейного программирования можно сформулировать следующим образом. Найти такое максимальное значение L, при котором прямая 30х1 + 40х2 = L пересекает допустимое множество.
В общем случае с геометрической точки зрения в задаче линейного программирования ищется такая угловая точка или набор точек из допустимого множества решений, на которой достигается самая верхняя (нижняя) линия уровня (прямая, отражающая целевую функцию), расположенная дальше (ближе) остальных в направлении наискорейшего роста.
Для нахождения экстремального значения целевой функции при графическом решении ЗЛП используют вектор-градиент целевой функции Ñf(`X) на плоскости Х1ОХ2. Этот вектор показывает направление наискорейшего изменения целевой функции, он равен
где
В рассматриваемом примере, если двигать прямую 30х1 + 40х2 = L из начала координат по направлению вектора-градиента целевой функции, то точкой, в которой достигается самая верхняя линия уровня является точка М пересечения прямых 5x1 + 2x2 = 1000 и x1 + 2x2 = 4000 с координатами x1 = 1500 и x2 = 1250. Таким образом, оптимальное решение достигается в точке М (1500; 1250). При этом значение целевой функции составит f(`X*) =30 * 1500 + 40 * 1250 = 95000.
На этом примере можно увидеть основные свойства задач линейного программирования: допустимое множество точек представляет собой выпуклый многоугольник, получившийся в результате пересечения полуплоскостей и наибольшее значение целевой функции достигается в его вершине – крайней точке.
Решение задачи линейного программирования может быть не единственным, а состоять из бесконечного числа точек.