ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 07.11.2023
Просмотров: 95
Скачиваний: 1
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
Тема: Проектирование манипулятора ПРструктуры ПВВ.
Номер задания: 17
Исходные данные:
-
Структура робота: НО – П (Y) – В (X) – В (Y). -
Тип Системы и модулей: РПМ 25; -
Значения обобщенных координат: q1 = 0.3 м; q2 = 120°; q3 = 180°; -
Макс. значения обобщенных координат: q1 = 1 мq2 = 200°; q3 = 360°; -
Значения обобщенных скоростей: = 0.5 м/с;
= 0.5 м/с;  = 180 м/с;
= 180 м/с;  = 180 °/с;
= 180 °/с; -
Точность позиционирования, мм: 0.7.
-
Размеры: а1 = 100 мм; а2 =250 мм; а3 = 140 мм; а4 = 200 мм; -
Материал: Медь.
Введение
Целью данной курсовой работы является проектирование промышленного робота агрегатно-модульной конструкции.
Агрегатно-модульный метод построения предполагает создание конструкции ПР на базе ограниченной группы нормализованных узлов, и имеет ряд преимуществ, которые можно свести к следующему:
-
возможность получение специализированных машин, наиболее полно отвечающих требованиям решения конкретной технологической задачи и не обладающих избыточностью функций, и поэтому более дешевых по сравнению с универсальными ПР. При этом специализированные ПР выполняются не по индивидуальным проектам, а являются отдельными представителями предварительно разработанной гаммы; -
сокращение времени и трудоемкости проектирования специализированных ПР, так как агрегатное построение конструкции позволяет более полно использовать выполненные ранее разработки и расширять гамму изделий путем добавления новых узлов и их комбинаций на базе ранее разработанных узлов; -
увеличение надежности ПР за счет отработанности входящих в него узлов и наибольшего соответствия данной конструкции решаемой задаче; -
улучшение условий эксплуатации и повышение ремонтопригодности парка ПР за счет уменьшения числа вариантов конструкций узлов и деталей; -
удешевление производства за счет снижения номенклатуры деталей в производстве и увеличения серийности их выпуска; -
сокращение сроков подготовки обслуживающего персонала.
Одной из разновидностей агрегатного принципа построения ПР является модульный принцип. При этом обычно подразумевается создание ПР на базе функциональных модулей, имеющих все необходимые элементы, включая приводы, датчики обратной связи и т.п., необходимые для обеспечения модулем своего функционального назначения. При построении ПР модули соединяются между собой в требуемом порядке, а также производится подсоединение силовых и управляющих коммуникаций [1].
Модульный принцип построения ПР по сравнению с методом построения на базе более мелких нормализованных узлов имеет преимущество в части большего удобства при создании и перестройке ПР и сокращения числа узлов, входящих в конкретный ПР.
1. Обоснование конструктивно-компоновочной схемы манипулятора и его модулей
Манипулятор состоит из следующих модулей:
-
НО – неподвижное основание; -
П (Y) – модуль линейного движения; -
В (X) – модуль вращательного движения; -
В (Y) – модуль вращательного движения;
Составляем структурную схему манипулятора, при этом учитываем ориентацию осей абсолютной системы координат и ориентацию звеньев манипулятора в пространстве.
Определим массу детали и грузоподъемность данного манипулятора.
Определяем номинальную грузоподъемность по формуле:
mн= Kc*Kn*mгр,
где Kc – коэффициент, учитывающий массу схвата, Kc =1,15;
Kn – коэффициент, учитывающий тип привода, Kn= 1,1;
mгр – масса детали, кг.
mн= 1,15*1,1*57,4 = 72,6 кг
Принимаем mн = 80 кг.
Данный манипулятор работает в сферической системе координат. В такой системе координат перемещение объекта манипулирования в точку пространства происходит в направлении радиуса-вектораr, и его угловых перемещений и θ в двух взаимно перпендикулярных плоскостях.
Для заданной детали, исходя из её веса и удерживающего усилия схвата, подбирается параллельный захват MHL2–16D2 длинный ход [2].
2. Кинематический расчет манипулятора
Выбираем специальные системы координат звеньев, структурная схема манипулятора с выбранными специальными системами координат согласно правилам Денавита-Хартенберга.
Определим параметры звеньев и кинематических пар, результаты занесем в таблицу 1.
Таблица 1 – Параметры звеньев и кинематических пар
| Номер звена | Кинематическая пара | Тип пары | Параметры | |||
| i | ai | si | i | |||
| 1 | 0,1 | П | 0 | 0 | 0 | 90° |
| 2 | 1,2 | В | -90 | 0 | -q1 | 90 |
| 3 | 2,3 | В | q2 | 0 | 0 | -90° |
| 4 | схват | | q3 | 0 | 0 | 0 |
q2 = 200°=3,491 рад;
q3 = 360°=6.283 рад;
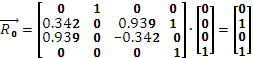
По данным таблицы 1 составляем расширенные матрицы перехода для манипулятора по формуле
Определим матрицу Т, связывающую обобщенные координаты манипулятора с положением и ориентацией центра схвата манипулятора в абсолютной системе координат, по формуле
Т = А1*А2*А3*А4,
Определим координаты и ориентацию центра схвата в абсолютной системе координат по формуле

где
 – координаты центра схвата в системе координат последнего звена манипулятора,
– координаты центра схвата в системе координат последнего звена манипулятора,
Найдем скорость центра схвата в абсолютной системе координат по формуле:

где
 – обобщенные скорости,
– обобщенные скорости,
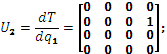


Найдем производную от матрицы Т по формуле


Определим по проекции саму скорость по формуле

где

Определение ускорения центра схвата в абсолютной системе координат
Определим ускорения для каждой обобщенной координаты. При этом предполагается, что звено движется по трапецеидальному закону изменения скорости.
Приближенно время движения звена определяется как отношение величины максимального перемещения звена к максимальной скорости перемещения. Тогдаускорениезвенаможноопределитькакотношениемаксимальнойскоростизвенаковремениразгоназвена до этойскорости [4].
Найдем обобщенные ускорения по формуле.

Найдем ускорение центра схвата в абсолютной системе координат по формуле


 ;
;  ;
;  ;
; 
;
 ;
; ;
;  ;
;





Определим полное ускорение схвата по формуле

где

3. Планирование траектории
В соответствии с заданием, рассчитаем 4–3–4 траекторию движения первого звена. При таком виде траектории она разбивается на три участка. Первый участок, задающий движение между начальной точкой и точкой ухода, описывается полиномом четвертой степени. Второй (средний) участок траектории между точкой ухода и точкой подхода описывается полиномом третьей степени. Последний участок траектории между точкой подхода и конечной точкой описывается полиномом четвертой степени. Таким образом, траектория j-той присоединенной переменной задается в виде последовательности полиномов hi (t). На каждом участке траектории для каждой присоединенной переменной используемые полиномы, выраженные в нормированном времени, имеют вид: