ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 08.11.2023
Просмотров: 130
Скачиваний: 2
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
СОДЕРЖАНИЕ
2.2 Решение системы дифференциальных уравнений
4. РАЗРАБОТКА СИСТЕМЫ ДЛЯ ПИТАНИЯ ВЕНТИЛЬНЫХ ДВИГАТЕЛЕЙ
4.1 Обоснование, выбор и описание функциональной схемы электропривода
4.2 Описание и построение структурной схемы электропривода
4.3 Разработка и описание принципиальной электросхемы датчика контроля состояния вентилей
4.4 Разработка и описание принципиальной электросхемы системы импульсно-фазового управления
4.5 Расчет и выбор элементов датчика контроля состояния вентилей
4.6 Расчет и выбор элементов системы импульсно-фазового управления
Оглавление
Введение 2
2РАЗРАБОТКА МОДЕЛИ ВЕНТИЛЬНОГО ДВИГАТЕЛЯ 17
2.1 Методы математического описания сложных систем 17
2.2 Решение системы дифференциальных уравнений 18
2.3Моделирование вентильного двигателя 26
4. РАЗРАБОТКА СИСТЕМЫ ДЛЯ ПИТАНИЯ ВЕНТИЛЬНЫХ ДВИГАТЕЛЕЙ 52
4.1 Обоснование, выбор и описание функциональной схемы электропривода 52
4.2 Описание и построение структурной схемы электропривода 56
4.3 Разработка и описание принципиальной электросхемы датчика контроля состояния вентилей 58
4.4 Разработка и описание принципиальной электросхемы системы импульсно-фазового управления 59
4.5 Расчет и выбор элементов датчика контроля состояния вентилей 61
4.6 Расчет и выбор элементов системы импульсно-фазового управления 61
ЗАКЛЮЧЕНИЕ 67
СПИСОК ЛИТЕРАТУРЫ 69
Введение
В настоящее время основные задачи электромеханики – это создание такого преобразователя энергии, у которых высокая энергетическая эффективность и минимальные материальные затраты.
Стоимость электрической машины снижается, так как она становится универсальной, то есть применяются в различных устройствах. В 30 годах прошлого столетия был описан вентильно-индукторный электропривод (ВИЭП) и на данный момент он является одним из развивающихся видов преобразователей энергии.
Выпрямительно-инверторный преобразователь используют в различных отраслях.
Японская компания Nidec Motor Corporation лидер за рубежом по разработке и внедрению ВИЭП. Данная компания выпускает машины мощностью от 14,7-308,7 кВт с перегрузочной способностью до 250%.
В России ВИЭП применяют, как трансмиссия бульдозернорыхлительного аппарата ДЭТ-400. Введение вентильно-индукторных машин увеличило надежность трансмиссии в 2 раза, а так же повышение к устойчивости к повышенной влажности – сравнение было с трактором ДЭТ-250М и ДЭТ-320. Это обеспечивает мощностью во всем тяговом диапазоне. ДЭТ-400 выпускается челябинским тракторным заводом.
Фирма «Вектор» поставляет ВИП и разрабатывает системы управления на отечественной и импортной элементной базе.
У данной фирмы последний проект ВИЭП с независимым возбуждением с диапазоном мощностей от 350 до 1250 кВт.
В приводе используют двигатель, который состоит из нескольких секций, и к ним подключается преобразователь частоты, и работают они не зависимо от других. И поэтому надежность данной системы высока, так как если вдруг отказывает какая-либо секция, то двигатель все равно продолжает работу.
Если количество числа секций увеличивается, то и происходит рост суммарного электромагнитного момента – это может варьировать выходную мощность привода в высоких пределах.
ВИЭП работает на теплостанциях Москвы и используется для насосов, вентиляторов и приводов дымососов.
Обеспечение регулирования скорости движения в широком диапазоне и оптимизация режимов работы двигателя и это преимущества инновационной электромеханической трансмиссии.
Программное обеспечение контроллера электротрансмиссии позволяет легко создавать полностью автоматизированные безэкипажные машины, работающие при минимальном расходе топлива и с максимальным КПД.
Достоинства вентильно-индукторного двигателя:
-
Отсутствие механического коммутатора. -
Очень простая конструкция. -
Разгон и торможение с необходимым ускорением. -
Высокий КПД в широком диапазоне частот вращения более 92%. -
Большое разнообразие конфигураций – различных отношений – 4/2, 6/4, 8/6. -
Массогабаритные характеристики, по которым ВИЭП превосходит частотно-регулируемый асинхронный электропривод.
7. Экономическая эффективность при эксплуатации двигателя.
Однако дискретная коммутация фаз, наличие нескольких каналов управления и нелинейности приводят к несостоятельности использования существующих подходов описания работы привода, основанных на различных вариантах аналитических моделей, применяющихся в традиционном электроприводе.
Описание работы ВИЭП с помощью фундаментальных законов физики для установления однозначных связей между искомыми характеристиками, параметрами и переменными приводит к введению множества допущений, искажающих реальные процессы в приводе. Данный подход не применим в случае, если исследователя интересуют не только количественные оценки работы, но и поведение привода в различных ситуациях.
Цель работы: разработка конкретной системы вентильно-индукторного двигателя.
Задачи работы:
-
Провести обзор конструкций вентильного двигателя. -
Разработка модели вентильного двигателя. -
Разработка схемных решений. -
Разработка системы.
1. ПРИНЦИП ДЕЙСТВИЯ ВЕНТИЛЬНО-ИНДУКТОРНОГО ДВИГАТЕЛЯ
-
Устройство вентильного двигателя
Вентильно–индукторный двигатель – это относительно новый тип электромеханического преобразователя энергии, который сочетает в себе свойства и электрической машины, и интегрированной системы регулируемого электропривода. На статоре есть обмотка якоря, разбитая на фазы, которые уложены в пазы таким образом, что пространственно сдвинуты друг относительно друга на угол, определяемый числом фaз. Благодаря этому углу поворота, который определяется встроенными датчиками Холла происходит подача управляющих команд.
Ниже приведён рисунок, показывающий структуру вентильного двигателя на примере семейства Faulhaber (рисунок 1.1)
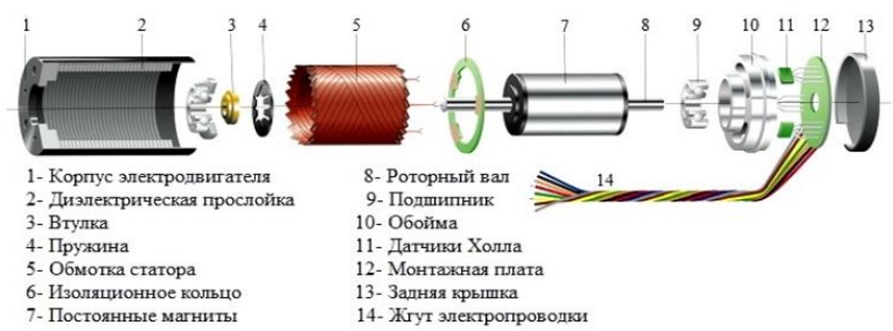
Рисунок 1.1 − Структура вентильного двигателя
Семейство вентильных двигателей Faulhaber имеет двухполюсный магнит на основе ротора и трехфазную обмотку статора, которая определяется интегрированными датчиками Холла. Общая конструкция может иметь разное количество пар полюсов и традиционный внешний вид статора. Обычно используется статор с тремя обмотками, соединенными в звезду или треугольник без вывода средней точки. Лучшей структурой с минимальным числом обмоток считается трехфазная структура.
Вентильно-индукторный двигатель − это синхронный двигатель с реактивным ротором и статором, имеющими зубцы и катушки с вентильным коммутатором, который создает однополярные импульсы тока по определенному алгоритму. Самые часто встречающиеся - 8/6 и 6/4 с числом фаз
 обмотки, где Zs – общепринятое обозначение числа выступов статора.
обмотки, где Zs – общепринятое обозначение числа выступов статора.Конструктивная схема ВИД конфигурации 6/2 изображена на рисунке 1.2.
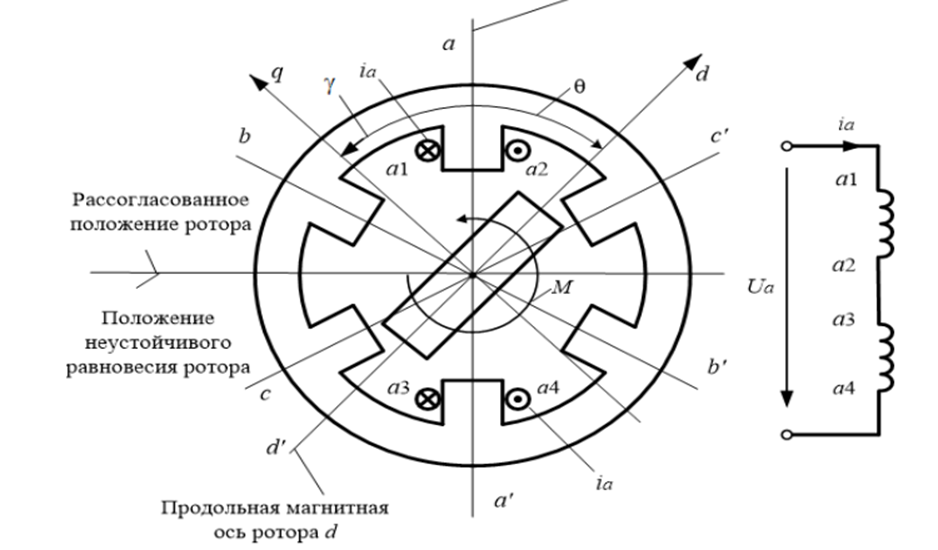
Рисунок 1.2 – Конструктивная схема ВИД
На рисунке 1.2 показаны две катушки a1-as и as-a4, расположенные по оси a. Эти катушки соединены последовательно и согласно. Они образуют обмотку фазы «a», в которой вентильный коммутатор (ВК) создает однополярный импульс тока ia, называемый током фазы «a».
В катушках, установленных на осях b-bʹ и c-cʹ происходят аналогичные процессы. Фазные токи iaʹib и iс ВК создаются напряжениями Uaʹ Ub и Uс, называемыми фазными напряжениями ВИД.
В проекте рассматривается одиночная симметричная коммутация фаз, где импульс тока протекает по одной фазе в любой момент времени в порядке a-b-c-a.
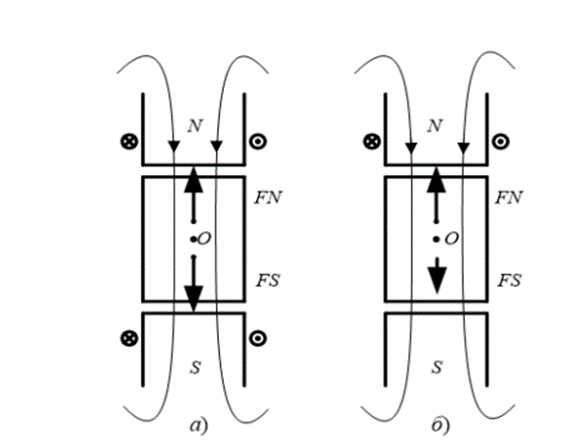
Рисунок 1.3 – Силы, действующие на ротор в радиальном направлении
На рисунке 1.3 (а) силы
 и
и 
, действующие на зубцы ротора, равны и противоположно направлены, чтобы предотвратить изгиб вала ротора и повысить надежность двигателя. Катушки должны быть установлены на нескольких зубцах статора, чтобы избежать изгибания ротора и износа. Также для обеспечения вращения ротора требуется, чтобы выполнялось условие (1.1):
 (1.1)
(1.1)где
 – количество зубцов (выступов) ротора;
– количество зубцов (выступов) ротора;  – количество зубцов (выступов) статора.
– количество зубцов (выступов) статора.1.2 Принцип действия
Рассматривая рисунок 1.2. можно объяснить принцип действия ВИД. Когда включается фаза «а», верхняя и нижняя катушки притягивают верхний и нижний выступы ротора, заставляя его вращаться против часовой стрелки до совпадения осей d и a. Согласованным положением ротора относительно фазы «a», так называется данное положение.
Фазы, через которые протекает электрический ток, называются активными фазами, а угол ϴ от активной фазы до оси ротора - углом рассогласования. Положение ротора, при котором угол рассогласования составляет ±90°, называется положением неустойчивого равновесия. Вращение будет кратковременным, если фазу «а» включить на долгий период.
Чтобы не произошло остановки в этом положение, нужно под углом включить фазу «b», а фазу «а» отключить. Чтобы ротор продолжал вращаться непрерывно, необходимо последовательно переключать фазы a-b-c-a… создавая циклическое движение магнитного поля.
На рисунке 1.4 показаны направления магнитодвижущих сил обмоток фаз «a», «b» и «c».
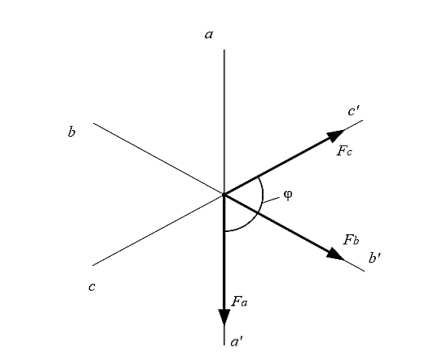
Рисунок 1.4 – Схема вращения магнитного поля ВИД конфигурации 6/2
Если при коммутации включена только одна обмотка, то ее МДС создает результирующее магнитное поле, сходное с направлением этой обмотки. При такой коммутации в индукторной машине результирующая МДС поля статора будет скачкообразно вращаться в секторе φ, и среднее значение результирующей МДС будет направлено по оси b-bʹ и отлично от нуля.
Из этого следует, что в вентильно–индукторный двигатель есть постоянное магнитное поле, кроме иных полей. Такие машины называются индукторными.
1.3 Особенности источников питания ВИД
Рассматриваемый двигатель получает питание через однополярные импульсы, а не от постоянных магнитов, что делает необходимым соблюдение специальных требований для работы преобразователя напряжения. Для питания ВИД каждый преобразователь должен выполнять три этапа цикла коммутации обмотки двигателя: подачу максимально допустимого напряжения, регулирование напряжения для поддержания магнитной индукции на заданном уровне и отключение обмотки для избежание возникновения тормозных моментов. Существует множество решений для топологии преобразователей для коммутации обмоток ВИД, и объясняются они следующими факторами:
-
Попытка оптимизировать электромагнитные процессы с целью достижения желаемых электромагнитных свойств. -
Сокращение расходов на элементы схемы.
Все преобразователи могут быть классифицированы на 4 категории.
1. «Классическая» полумостовая схема и ее модификации.
2. Преобразователи с накоплением энергии путем дополнительных обмоток или конденсаторов (не популярны из-за высокой стоимости).
3. Преобразователи с дополнительным звеном постоянного тока используют повышающие преобразователи напряжения и применяются в высокоскоростных приводах.
4. Преобразователи с рассеиванием энергии из отключаемой фазы преобразуют магнитное поле в тепло. Они имеют низкую стоимость и простую конструкцию, но также имеют низкий КПД.
В данной работе рассмотрена математическая модель полумостовой схемы, включающей транзисторы и диоды на диагонали.
1.4 Принципы управления частотой вращения ВИД
Для управления угловой скоростью движения ротора можно использовать два способа, аналогичных тем, которые применяются для вентильных двигателей постоянного тока: изменение амплитуды фазных напряжений или изменение углов включения и отключения обмоток.
Чтобы управлять частотой вращения, можно изменять амплитуды фазных напряжений так же, как при управлении частотой вращения ВДПТ.
Другой способ − изменять угол включения и отключения на примере ВИД конфигурации 6/2.
Ротор движется благодаря электромагнитному моменту, который зависит от положения ротора, расположения активной фазы в текущий момент времени и тока активной фазы.
Рассмотрим электромагнитный момент
 одной фазы «a» при постоянном электрическом токе
одной фазы «a» при постоянном электрическом токе