ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 08.11.2023
Просмотров: 136
Скачиваний: 2
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
СОДЕРЖАНИЕ
2.2 Решение системы дифференциальных уравнений
4. РАЗРАБОТКА СИСТЕМЫ ДЛЯ ПИТАНИЯ ВЕНТИЛЬНЫХ ДВИГАТЕЛЕЙ
4.1 Обоснование, выбор и описание функциональной схемы электропривода
4.2 Описание и построение структурной схемы электропривода
4.3 Разработка и описание принципиальной электросхемы датчика контроля состояния вентилей
4.4 Разработка и описание принципиальной электросхемы системы импульсно-фазового управления
4.5 Расчет и выбор элементов датчика контроля состояния вентилей
4.6 Расчет и выбор элементов системы импульсно-фазового управления
 .
. График зависимости момента от угла рассогласования показывает, что при γ=90°, γ=0°, γ=180° момент равен нулю — это соответствует состоянию устойчивого и неустойчивого равновесия. Ротор будет возвращаться в исходное положение при отклонении от устойчивого равновесия, с моментом, который зависит от направления вращения. Для момента, отклоняющегося по часовой стрелке, следует понимать отрицательные значения, а при отклонении ротора в противоположном направлении - положительные значения. График зависимости
 от угла рассогласования
от угла рассогласованияизображен на рисунке 1.5.
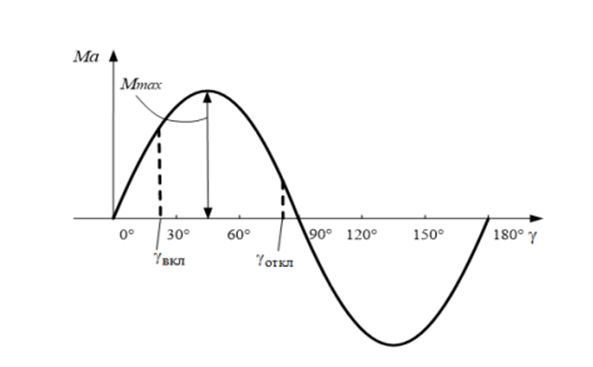
Рисунок 1.5 – График зависимости
от угла рассогласованияПредположим, что изменение фазного тока происходит мгновенно при включении или отключении обмотки. Пусть ротор находится в положении, приведённом на рисунке 1.2 Для запуска ротора вращения против часовой стрелки, необходимо включить фазу «a» при её начальном положении и затем на обмотку фазы «b» при положении ротора с острым углом между осью «b» и продольной осью ротора «d». Ток обмотки «a» будет мгновенно снижен до нуля при включении обмотки «b».
Угол включения – угол рассогласования
 , при котором включается обмотка фазы «a».
, при котором включается обмотка фазы «a». Угол отключения – угол рассогласования
, при котором отключается обмотка фазы «a».1.5 Применение ВИД на судне
Современные вентильные двигатели стремятся к интеграции с управляющей электроникой в один корпус, чтобы предложить комплектующие привода в виде законченного сбора. Это решение устраняет проблемы совместимости компонентов привода и различных интерфейсов.
Высоковольтные СЭЭС до 10000 В с СЭД все чаще используются на морском транспорте из-за увеличения мощностей СЭЭС и необходимости повысить манёвренность судов с помощью энергоемких ГЭУ и ЭПУ. Для новых судов в СЭД распространены пропульсивные комплексы, которые представляют собой гондолу за бортом судна, объединяющую функции движителя и руля с электрическим приводом. Первая такая ГЭУ была предложена фирмой АВВ в 1987 г. под названием Azipod (азимутальный движительный привод гондольного типа). В этой области лидируют компании АВВ (Azipod и Compact) и Rolls-Royce (Mermaid) в партнерстве с Converteam. Компании Schottel и SSP имеют большой опыт в создании мощных пропульсивных систем. Они используют разные типы приводных двигателей, но чаще всего − это вентильные двигатели с магнитным возбуждением (ВДПМ).
Инженеры-проектировщики кораблей хотели создать полностью электрический корабль и обоснования, почему они хотели сделать именно так были следующие: происходит большая экономия топлива, можно сократить численность экипажа, введение новых электроэнергоёмких систем на разных кораблях, на корабле стабильно происходил увеличение электроэнергии, уменьшение водоизмещения
Полное электродвижение уже применяется на дизель-электрических подводных лодках (ДЭПЛ) с аккумуляторной батареей и подходит для надводных кораблей, которые работают на высоких мощностях. Например, ледоколы имеют длительные и маневренные режимы с переменными нагрузками на винтах. Поэтому они нуждаются в полном электродвижении.
В 1980-х гг. в России начали создавать всережимную машину на основе ВДПМ для ДЭПЛ. Сначала был сделан макет 75 кВт, потом поставлен двигатель около 4 МВт и 200 об/мин на лодку 4-го поколения (рисунок 1.6).
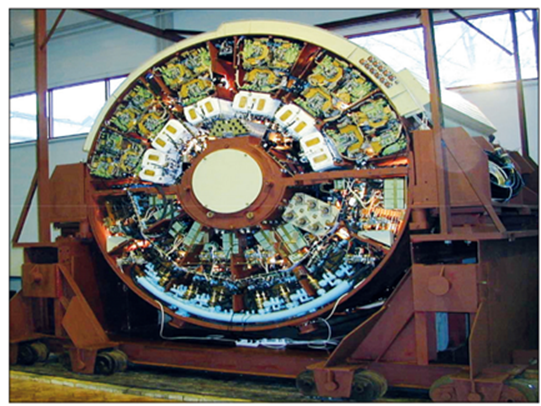
Рисунок 1.6 – ВДПМ мощностью 4 МВт
Но двигатель оказался неотработанным и ушел в опытную эксплуатацию. «Электросила» продолжила работать над новой версией ВДПМ с проблемами. Другие морские страны тоже разрабатывали ВДПМ для ГЭД фирм Siemens, Magnet-Motor, ABB Industria, Jeumont Electric и др. Машины, такие как Magnet-Motor, ABB Industria и Jeumont Electric, также серийно поставляются для различных военных кораблей.
На атомных ледоколах «Таймыр» и «Вайгач» стоят синхронные ГЭД переменного тока с вентильными двигателями. Они лучше двигателей постоянного тока, но имеют недостатки из-за демпферной обмотки: больше пульсации токов, хуже форма токов якоря, что снижает надежность двигателя.
На ледоколах «Таймыр» и «Вайгач» часто ломались демпферные обмотки синхронных ГЭД. Это включает поломку шпилек крепления обмоток и обрывы стержней самих демпферных обмоток. Поломки шпилек были вызваны ошибками в конструкции и должны быть исправлены усовершенствованием материалов. Обрывы стержней были связаны с использованием одноякорной синхронной машины в частотнорегулируемом электроприводе, которая не оправдала ожиданий по надежности. Поэтому на ледоколе «Арктика» поставлен асинхронный двигатель 2 × 10 МВт с короткозамкнутым ротором и двумя обмотками на статоре от «Русэлпром».
Это повышает живучесть ледокола в Арктике, но усложняет схему и систему регулирования. Асинхронный двигатель выбран фирмой Converteam для проекта 22220, хотя она также разрабатывает индукционные двигатели 20 МВт для авианосца «Queen Elizabeth». В НИР по ВРК до 7,5 МВт для ледокола-снабженца асинхронный двигатель тоже предпочтен ВДПМ.
Развитие вентильных индукторных двигателей (ВИД) получило новое развитие благодаря эволюции в электронике и усовершенствованию методик управления. Однако, судостроение в настоящее время не использует данную технологию.
ВИД – новая технология в области приводов с регулируемой скоростью. Они просты, надежны и работают в сложных условиях. Они имеют высокий КПД, плотность мощности и момента, малый вес и объем.
Японская компания Nidec Corporation лидирует в разработке SRD малой и средней мощности от 14,7. До 308,7 кВт на частотах вращения от 1000 до 4500 об/мин с перегрузочной способностью до 250%.
Вместе с учеными и специалиста Южно-Российского государственного политехнического университета (НПИ) имени М.И. Платова и фирмой «ВИЭМ» создается гребной индукторный двигатель (ВИП) большой мощности для СУЭК.
ЗАО «ИРИС» занимается гребными индукторными двигателями для ДЭПЛ начиная с 2008 года. Не считая макета, который был создан ранее на рисунке 1.7.
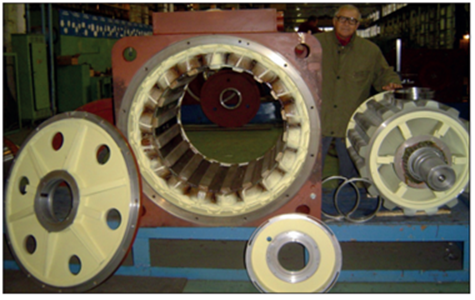
Рисунок 1.7 − ВИД 500 кВт в организации ЗАО «ИРИС»
«Ирис» разработал судовой агрегат ИД по заказу ЦНИИ СЭТ для морского буксира проекта 745МБС. Весной 2010 г. в Новочеркасске двигатель протестировали при 50 % нагрузке с помощью самонагружения. Этот метод использует двухпакетную шестифазную конструкцию ИД и возврат электрической энергии от генераторной части.
Таким образом, не нужна большая сеть, а только для покрытия потерь в преобразователе и машине.
Тесты при 50 % нагрузке (из-за ограничения мощности преобразователей) показали достаточный запас для достижения проектной мощности 2 МВт при скорости 200 мин.
Так на морском буксире проекта 745МБС «Виктор Конецкий» были выполнены все высокие требования к СЭД с помощью ВИП 2 МВт. Экипаж судна доволен результатами работы.
Также надежно работают разные вспомогательные ВИП, в том числе высокоскоростные, разной мощности и назначения на новой ДЭПЛ. Предварительные оценки говорят о возможности создания ГЭД и ВРК на базе ВИД в размерах текущих систем на ВДПМ и АД.
-
РАЗРАБОТКА МОДЕЛИ ВЕНТИЛЬНОГО ДВИГАТЕЛЯ
2.1 Методы математического описания сложных систем
Одним из важнейших этапов проектирования и исследования электронных устройств является разработка математических моделей их работы, особенно электрических и электронных устройств.
При сборе данных для сложных электронных систем существует два основных подхода. В первом методе математические расчеты немеханических систем производятся максимально подробно, без каких-либо допущений, допускающих упрощение. Во втором случае модель электронной системы упрощается с использованием различных допущений, пока приближенные параметры не будут соответствовать нормальной работе системы, что позволяет анализировать ее не только путем компьютерного моделирования, но и аналитическим путем. Построение модели вторым способом используется в работах И. И. Блехмана, В. Л. Вейца, В. М. Шестакова [11] и других.
Функциональный анализ электронных систем должен основываться на их надежной работе. Комплексная структура для учета различных аспектов стандартов ЭМС при построении полезной модели, которая имеет отношение к деятельности и цели исследования. При этом очень важен уровень сложности модели, определяемый общим количеством интересующих факторов, влияющих на поведение изучаемой системы. Производительность метода расчета и достоверность полученных на его основе результатов не соответствуют уровню модели. Противоречивый характер зависимости от адекватного уровня модели и способности алгоритма рассчитывать сложный уровень модели приводит к проблеме выбора адекватной модели, имеющей большое значение в практических приложениях. Проблема точного учета имущества, важен для расчета переходных процессов в электронных системах (ЭМС), которые могут быть эффективно решены на основе использования методов декомпозиции. Использование методов декомпозиции связано с необходимостью сведения высокоуровневой задачи к ряду низкоуровневых задач для получения правильного решения исходной задачи. Кроме того, задача построения адекватной модели может быть решена на основе обобщения и накопления исследовательского опыта. Результатом такого обобщения является спектр частично асимптотических моделей или набор подходящих функций, полезных при изучении определенного типа функций, работающих в реальных ЭМС в различных приложениях.
При построении модели вентильного двигателя лучше всего выбрать класс модели, ориентированный на общие функции или компоненты. Характерными особенностями локальных динамических процессов являются их причины обособленности на участках в результате действия сильных сил или же слияния одного и того же процесса с общими процессами. Эти отношения, как правило, характеризуются небольшим влиянием обобщения на производительность локальных процессов и пренебрежимо малым влиянием обратной связи от локальных процессов на общую производительность ЭМС.