ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 09.11.2023
Просмотров: 379
Скачиваний: 2
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
 (9.1)
(9.1)В начале расчета двигателя все величины, входящие в (9.1), кроме синхронной угловой скорости, неизвестны. Поэтому расчет проводят, задаваясь на основании имеющихся рекомендаций значениями электромагнитных нагрузок (А и Вδ), коэффициентов (αδ, kВ и koб), и приближенно определяют расчетную мощность Р'. Остаются два неизвестных (D и lδ), однозначное определение которых без дополнительных условий невозможно. Таким условием является отношение lδ/D или более употребительное в расчетной практике отношение λ = lδ /τ. Это отношение в значительной степени определяет экономические данные машин, а также оказывает влияние на характеристики и условия охлаждения двигателей.
У большинства выпускаемых асинхронных двигателей общего назначения отношение λ, изменяется в достаточно узких пределах. Поэтому для определения D и lδ можно предварительно выбрать то или иное отношение λ, характерное для заданного исполнения и числа полюсов машины. Это позволит однозначно определить главные размеры, исходя из (9.1). Однако внутренний диаметр статора непосредственно связан определенными размерными соотношениями с внешним диаметром статора Da, в свою очередь, определяющим высоту оси вращения h, значение которой при проектировании новых двигателей может быть принято только из стандартного ряда высот, установленных ГОСТом.
Внешний диаметр статора должен также соответствовать определенным условиям, налагаемым требованиями раскроя листов электротехнической стали с наименьшими отходами при штамповке. С учетом этих требований при ручном расчете асинхронного двигателя более целесообразным является выбор главных размеров, основанный на предварительном определении высоты оси вращения, увязке этого размера с внешним диаметром статора и последующем расчете внутреннего диаметра статора D.
В связи с этим выбор главных размеров проводят в следующей последовательности.
Высоту оси вращения предварительно определяют по рис. 9.18, а или б для заданных Р2 и 2р в зависимости от исполнения двигателя.
Из ряда высот осей вращения (см. табл. П 6.2) принимают ближайшее к предварительно найденному меньшему стандартному значению Л. Следует иметь в виду
, что ГОСТ определяет стандартные высоты осей вращения независимо от назначения и конструктивного исполнения асинхронных двигателей, поэтому высота оси вращения любого проектируемого двигателя должна быть равна одному из этих значений.
Зависимость (9.1) показывает, что при одной и той же длине l мощность P' изменяется пропорционально D2. Поэтому машину при выбранной высоте оси вращения выгодно выполнять с возможно большим диаметром. Максимально возможный диаметр Dа должен быть Da ≤ 2(h – h1min), где h1min — минимальное расстояние от стали сердечника статора до опорной плоскости машины (рис. 9.19), включающее толщину корпуса bкорп и расстояние от корпуса до опорной плоскости h2. Если машина выполняется со сварной станиной, то допустимое расстояние h1min уменьшается. В том случае, когда h1 >> h1min, в нижней части корпуса оребренных двигателей исполнения со степенью защиты IP44 размещают несколько охлаждающих ребер, высота которых может быть меньше, чем у расположенных на верхней и боковых частях корпуса.
Обычно расстояние h1 выбирают равным или несколько большим h1min, значения которого для двигателей с различной высотой оси вращения h приведены на рис. 9.19. При выборе Da должно быть учтено также требование использования для штамповки рулонной или листовой электротехнической стали стандартных размеров с наименьшими отходами.
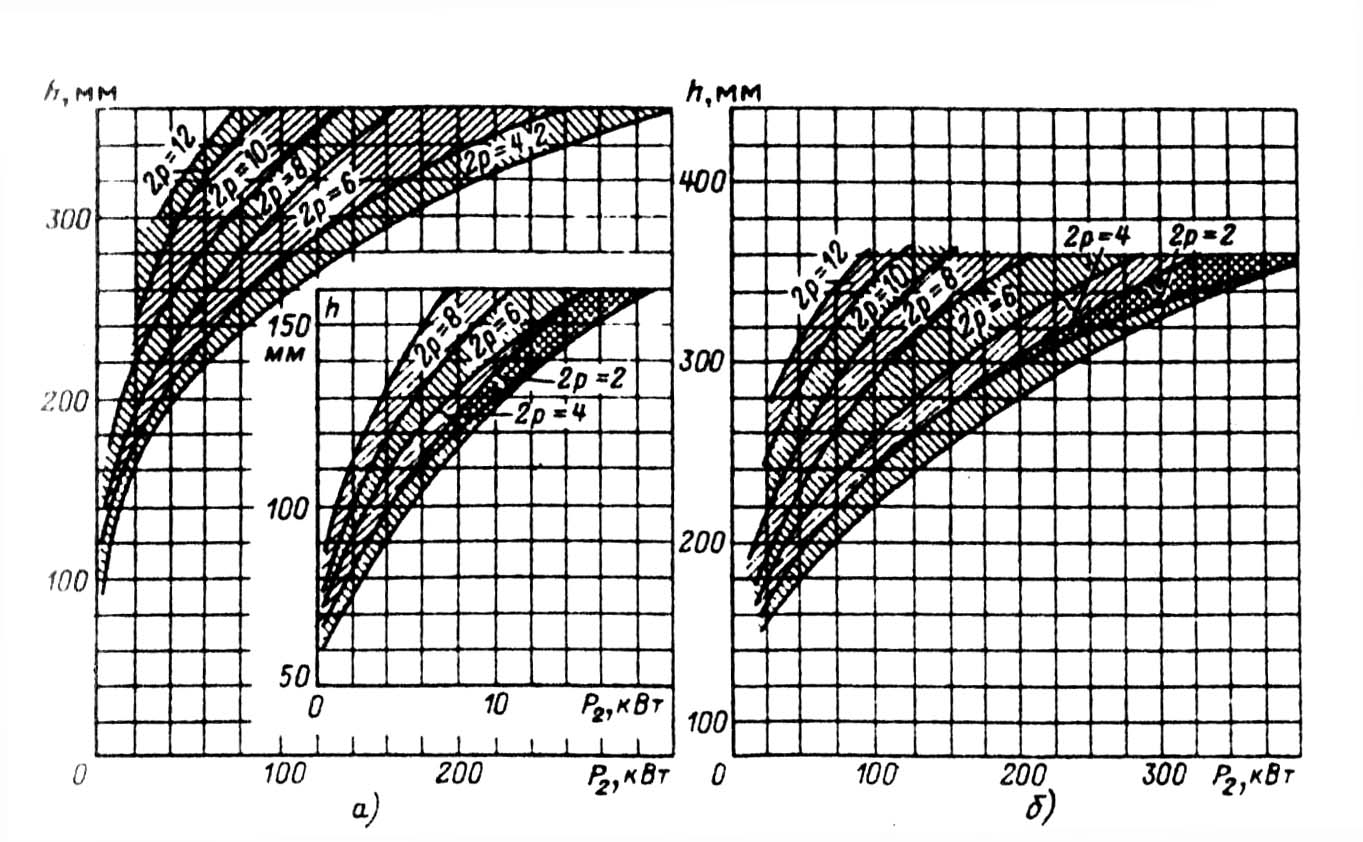
Рис. 9.18. Высота оси вращения h двигателей
различных мощности и частоты вращения:
а — со степенью защиты IP44;
б — со степенью защиты IP23
Внешние диаметры сердечников статоров двигателей серий в зависимости от высоты оси вращения при учебном проектировании могут быть приняты по данным табл. 9.8.
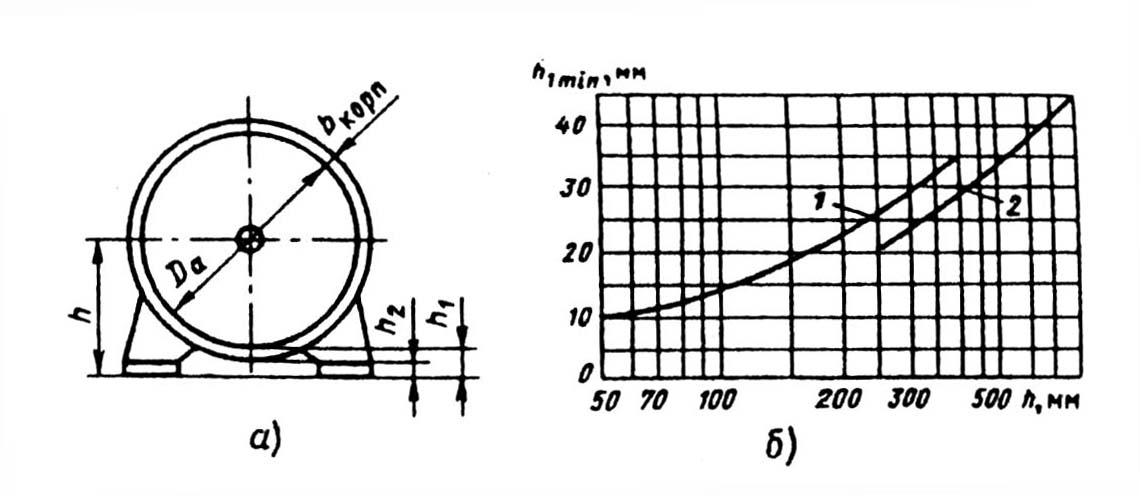
Рис. 9.19. К выбору наружного диаметра Dc статора (а).
Минимально допустимое расстояние h1 от сердечника
статора до опорной поверхности двигателя в зависимости
от высоты оси вращения двигателей со станиной (б):
1 — литой; 2 — сварной
Таблица 9.8. Внешние диаметры статоров асинхронных
двигателей различных высот оси вращения
| h, мм | 56 | 63 | 71 | 80 | 90 | |
| Da, мм | 0,08— 0,096 | 0,1—1,08 | 0,116—0,122 | 0,131—0,139 | 0,149—0,157 | |
| h, мм | 100 | 112 | 132 | 160 | 180 | |
| Da, мм | 0,168—0,175 | 0,191-0,197 | 0,225—0,233 | 0,272—0,285 | 0,313—0,322 | |
| h, мм | 200 | 225 | 250 | 280 | 315 | 255 |
| Da, мм | 0,349—0,359 | 0,392—0,406 | 0,437—0,452 | 0,52-0,53 | 0,59 | 0,66 |
Внутренний диаметр статора D в общем случае можно определить по внешнему диаметру, высотам ярма (ha) и зубцов (hz) статора:
D = Da— 2(ha + hz).
На данном этапе расчета размеры ha и hz неизвестны. Поэтому для определения D используют эмпирические зависимости. При одном и том же уровне индукции на участках магнитопровода в машинах с одинаковым D высота ярма статора будет пропорциональна потоку, а следовательно, обратно пропорциональна числу полюсов машины (прямо пропорциональна полюсному делению). Принимая, что размеры пазов не зависят от числа полюсов машины, получаем приближенное выражение
D = KDDa. (9.2)
Значения коэффициентов КD, приведенные в табл. 9.9, характеризуют отношения внутренних и внешних диаметров сердечников статоров асинхронных двигателей серий 4А и АИ при различных числах полюсов и могут быть использованы для предварительного определения D вновь проектируемой машины.
Таблица 9.9. Отношение КD = D/Da, в асинхронных двигателях
в зависимости от числа полюсов
| 2p | 2 | 4 | 6 | 8 | 10—12 |
| КD | 0,52—0,6 | 0,62—0,68 | 0,7—0,72 | 0,72—0,75 | 0,75—0,77 |
Далее находят полюсное деление τ, м:
τ = πD/2p (9.3)
и расчетную мощность Р, В • А:
P' = mIE = P2
 (9.4)
(9.4) где Р2 — мощность на валу двигателя, Вт; kE — отношение ЭДС обмотки статора к номинальному напряжению, которое может быть приближенно определено по рис. 9.20.
Предварительные значения η и cos φ, если они не указаны в задании на проектирование, находятся по ГОСТу. Приближенные значения η и cos φ могут быть приняты по кривым рис. 9.21.
Предварительный выбор электромагнитных нагрузок А, А/м, и Bδ, Тл, должен быть проведен
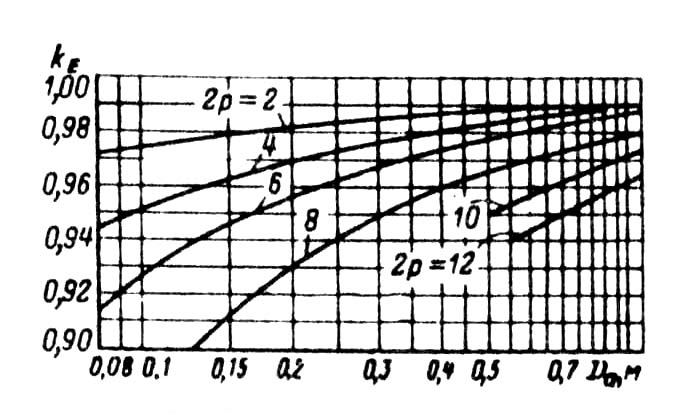
Рис. 9.20. Значения коэффициента KE
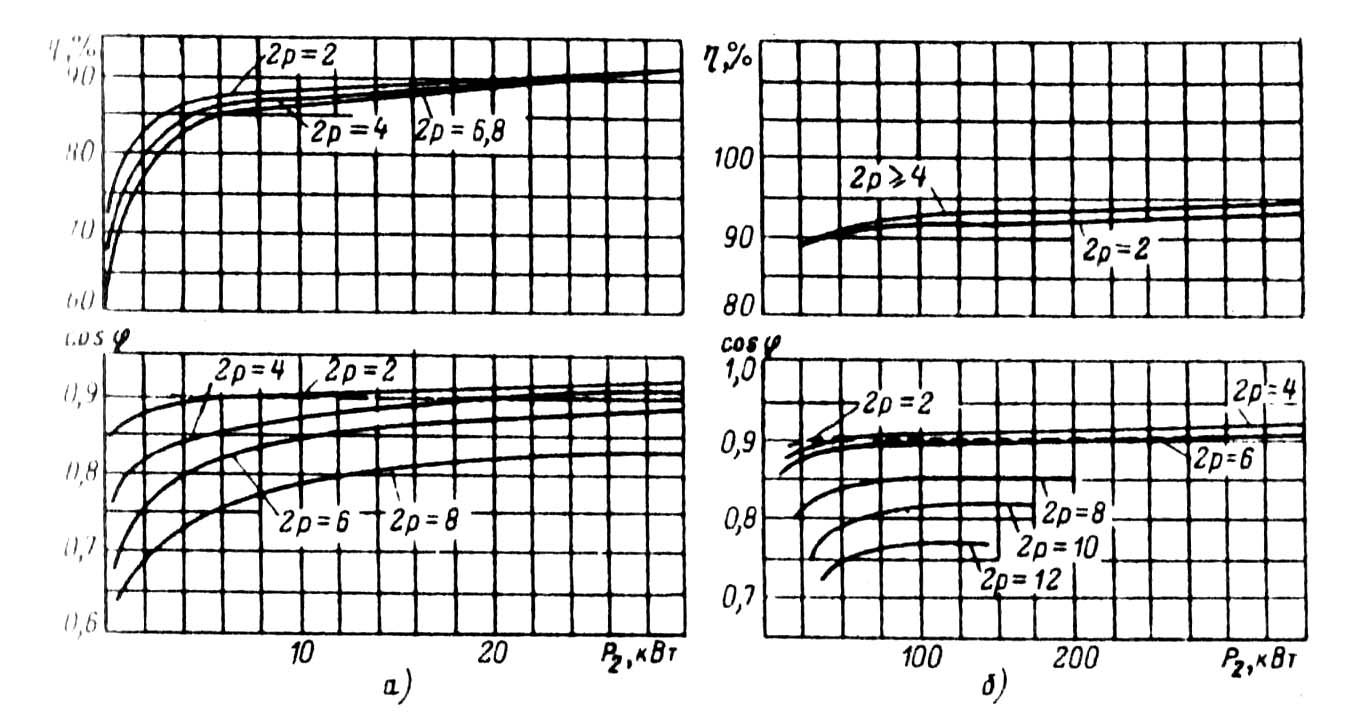
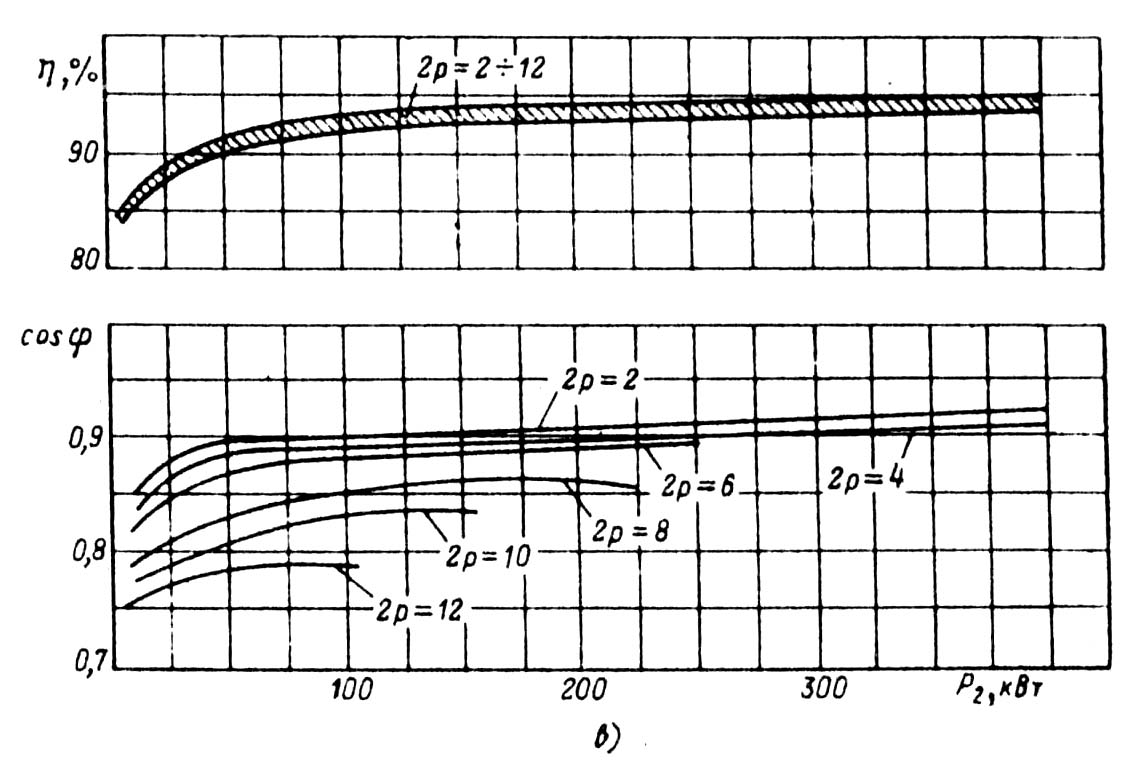
Рис. 9.21. Примерные значения КПД и cos φ асинхронных двигателей:
а — со степенью защиты IP44 и мощностью до 30 кВт;
б — со степенью защиты IP44 и мощностью до 400 кВт;
в — со степенью защиты IP23
особо тщательно, так как они определяют не только расчетную длину сердечника, но и в значительной степени характеристики машины. При этом если главные размеры машины зависят от произведения АВδ [см. (9.1)], то на характеристики двигателя оказывает существенное влияние также и соотношение между этими величинами. Рекомендации по выбору А и Вδ представлены в виде кривых на рис. 9.22—9.24 для машин различных мощности и исполнения. На каждом из рисунков даются области их допустимых значений. При выборе конкретных значений А и Вδ в пределах рекомендуемой области следует, руководствуясь приведенными выше замечаниями, учитывать требования технического задания к хактеристикам проектируемого двигателя.
Коэффициент полюсного перекрытия αδ и коэффициент формы поля kВ в асинхронных машинах определяются степенью уплощения кривой поля в зазоре, возникающей при насыщении зубцов статора и ротора, и могут быть достаточно достоверно определены топь ко после расчета магнитной цепи. Поэтому для расчета магнитной цепи удобнее рассматривать синусоидальное поле, а влияние уплощения учесть при расчете магнитного напряжения отдельных участков магнитной цепи.
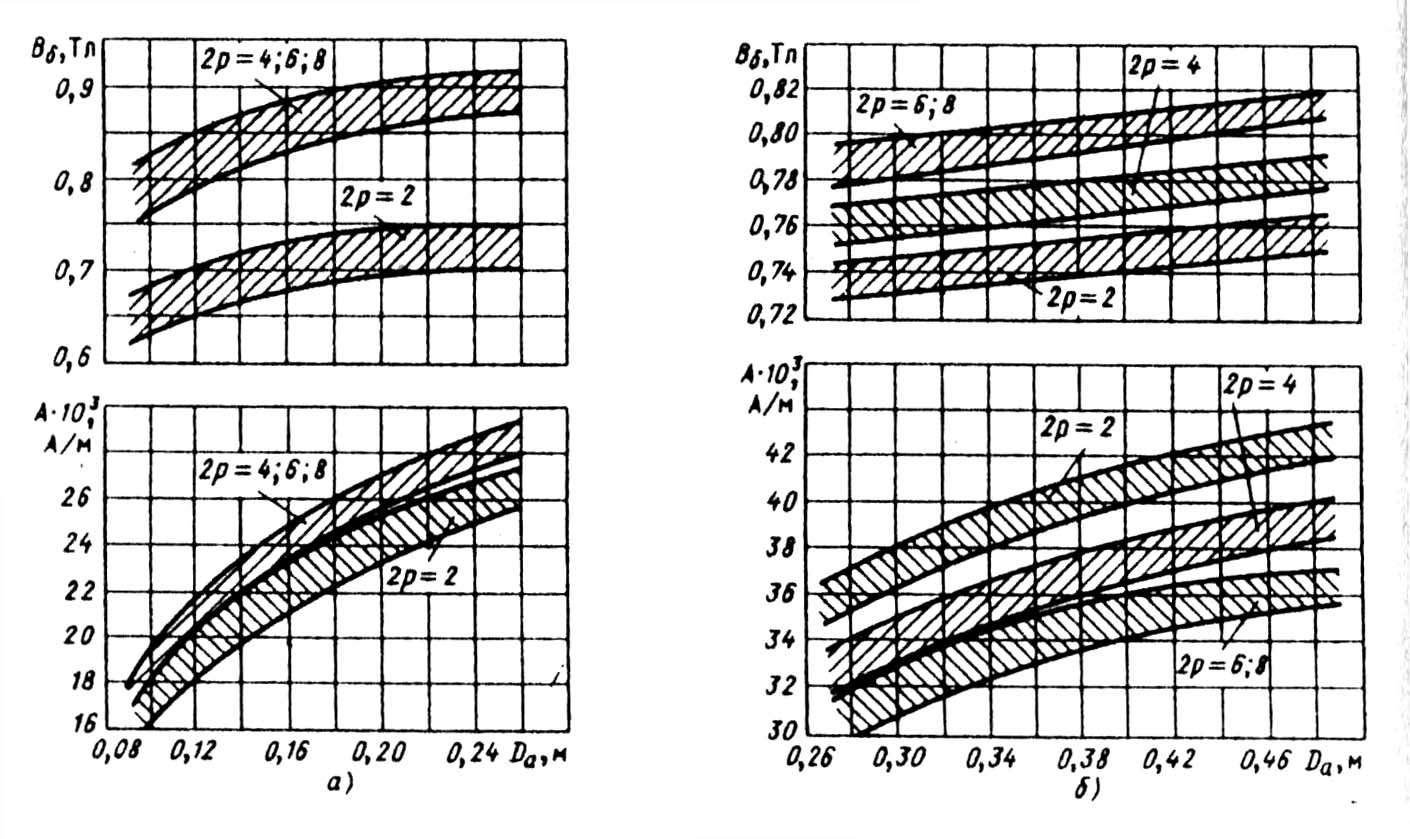
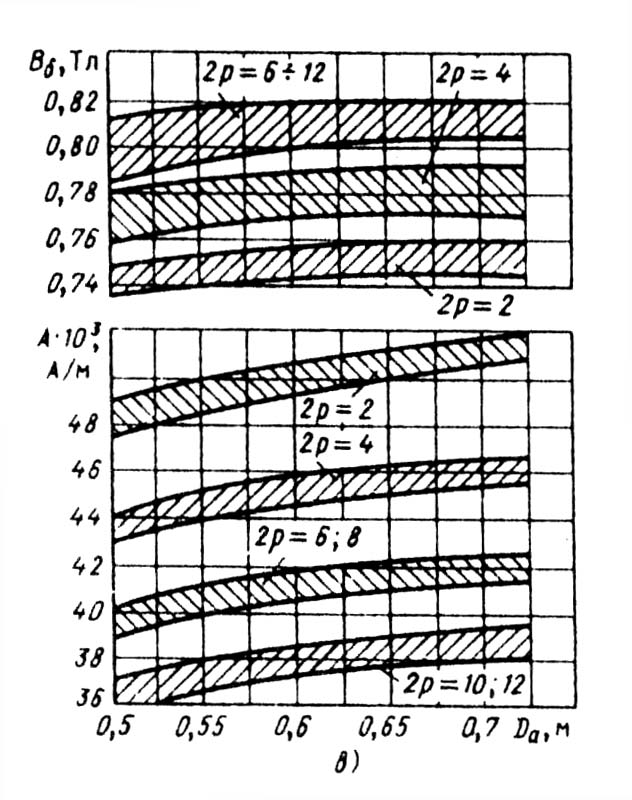
Рис. 9.22. Электромагнитные нагрузки асинхронных двигателей
со степенью защиты IP44 при высоте оси вращения:
а – h ≥ 132 мм; б – h = 150…250 мм;
в – h ≥ 280 мм (с продуваемым ротором)
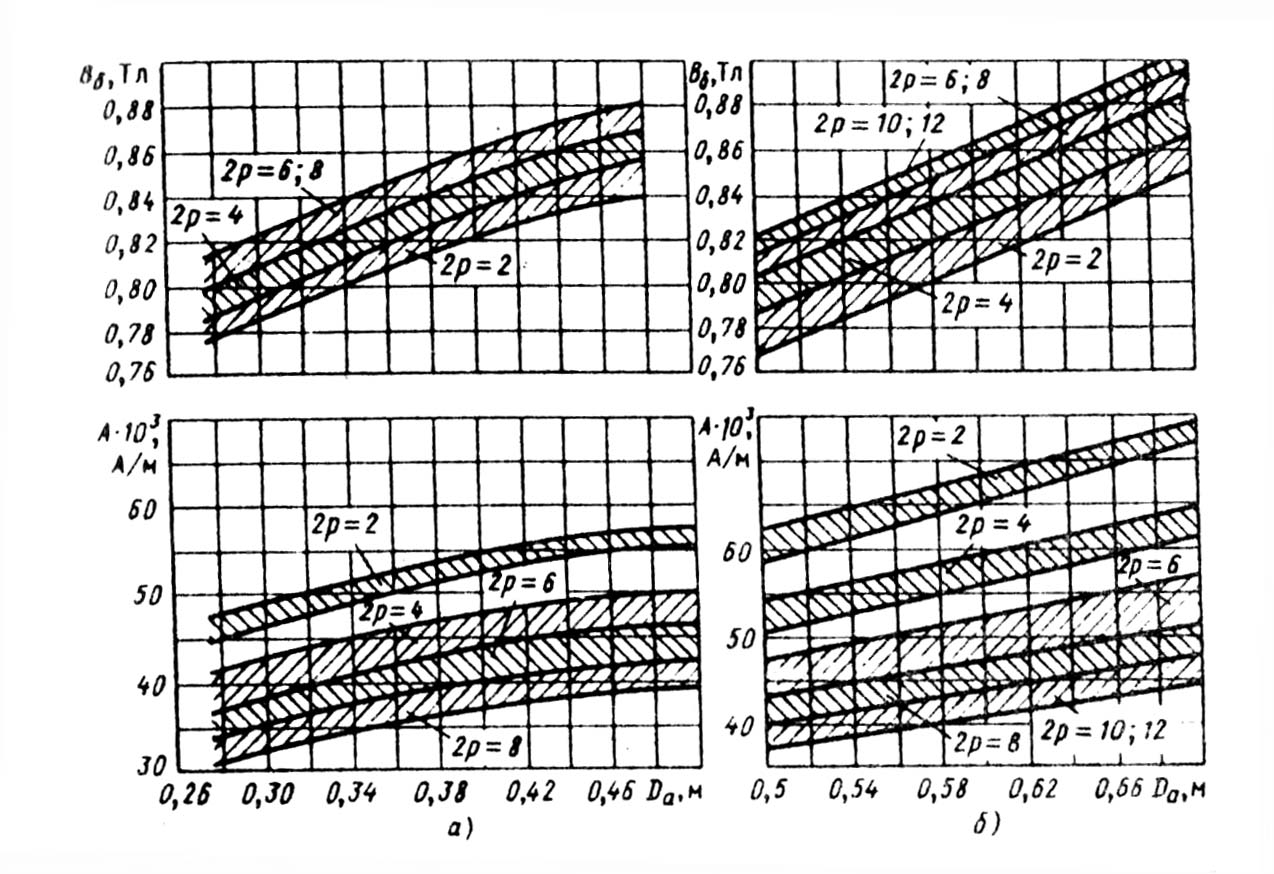
Рис. 9.23. Электромагнитные нагрузки асинхронных двигателей
со степенью защиты IP23 при высоте оси вращения:
а – h = 160…250 мм; б – h ≥ 280 мм;
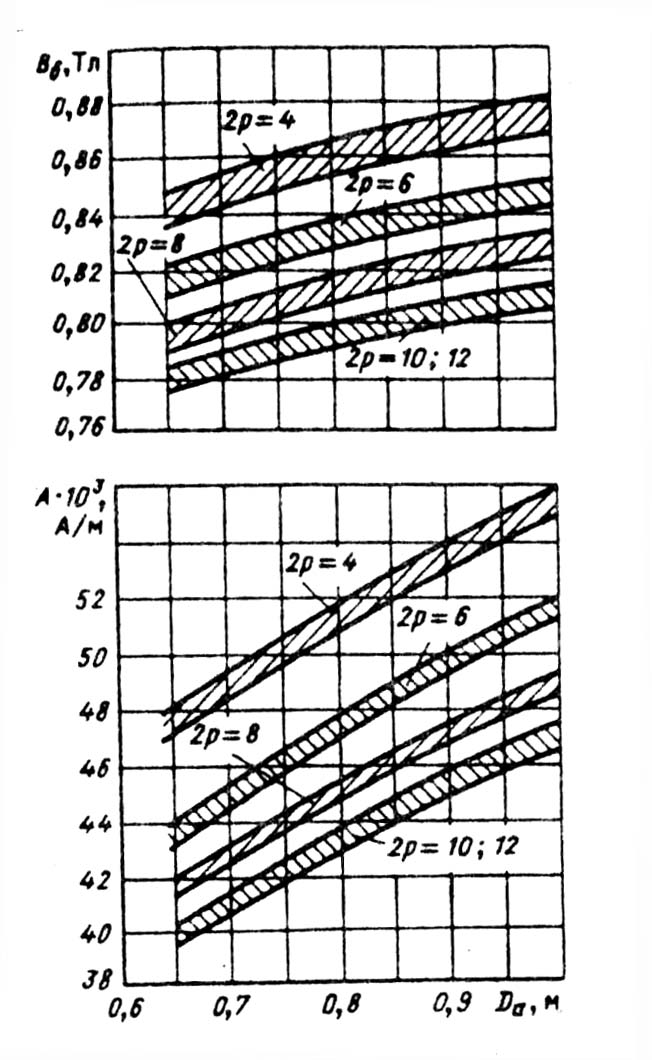
Рис. 9.24. Электромагнитные нагрузки асинхронных
двигателей высокого напряжения со степенью защиты IP23
Основываясь на этом, значения коэффициентов предварительно принимают равными:
αδ = 2/π ≈ 0,64; kВ = π/(2
 ) = 1,11.
) = 1,11.Предварительное значение обмоточного коэффициента k0e\ выбирают в зависимости от типа обмотки статора. Для однослойных обмоток koб1 = 0,95...0,96. Для двухслойных и одно-двухслойных обмоток при 2р = 2 следует принимать koб1 = 0,90... 0,91 и при большей полюсности koб1 = 0,91. ..0,92.
Синхронная угловая частота двигателя Ω, рад/с, рассчитывается по формуле
Ω = 2π
 или Ω = 2π
или Ω = 2π (9.5)
(9.5)где n1 — синхронная частота вращения, об/мин; f1 — частота питания, Гц.
Из (9.1), с учетом значенияαδ , расчетная длина магнитопровода, м,
 . (9.6)
. (9.6)Критерием правильности выбора главных размеров D и lδ служит отношение λ = lδ /τ, которое обычно находится в пределах, показанных на рис. 9.25 для принятого исполнения машины. Если λ оказывается чрезмерно большим, то следует повторить расчет для ближайшей из стандартного рада большей высоты оси вращения А. Если К слишком мало, то расчет повторяют для следующей в стандартном раду меньшей высоты h.
На этом выбор главных размеров заканчивается. В результате проделанных вычислений получены значения высоты оси вращения h, внутреннего диаметра статора D, внешнего диаметра статора Dа, расчетной длины магнитопровода lδ и полюсного деления τ.
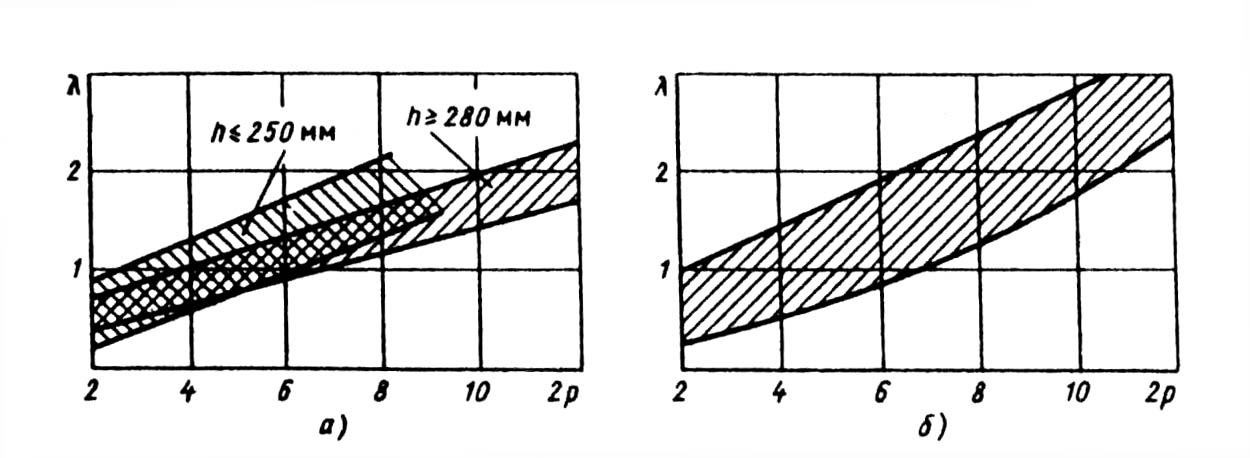
Рис. 9.25. Отношение λ = lδ /τ у двигателей исполнения
по степени защиты:
а – IP44; б – IP23
Для расчета магнитной цепи помимо lδ необходимо определить ценностью конструктивную длину и длину стали сердечников статора (l1 и lст1) и ротора (l2 и lст2). В асинхронных двигателях, длина сердечников которых не превышает 250. ..300 мм, радиальные вентиляционные каналы не делают. Сердечники шихтуются в один пакет. Для такой конструкции
l1 = lст1 =