ВУЗ: Казахская Национальная Академия Искусств им. Т. Жургенова
Категория: Книга
Дисциплина: Не указана
Добавлен: 03.02.2019
Просмотров: 21605
Скачиваний: 19
Spectral Changes and Linear Distortion 2-47
is
(2.2.15a)
(2.2.15b)
where c is the number of ripples per unit bandwidth, in hertz, and m and p are the maximum val-
ues of the magnitude and phase ripples, respectively. If m = p = 0, then there is no linear distor-
tion of signals, just unity gain, and uniform time delay of
due to the linear-phase
term –
ωa. By using Fourier-transform methods, it can be shown that the output g(t) correspond-
ing to an arbitrary input f(t) has the form
(2.2.16)
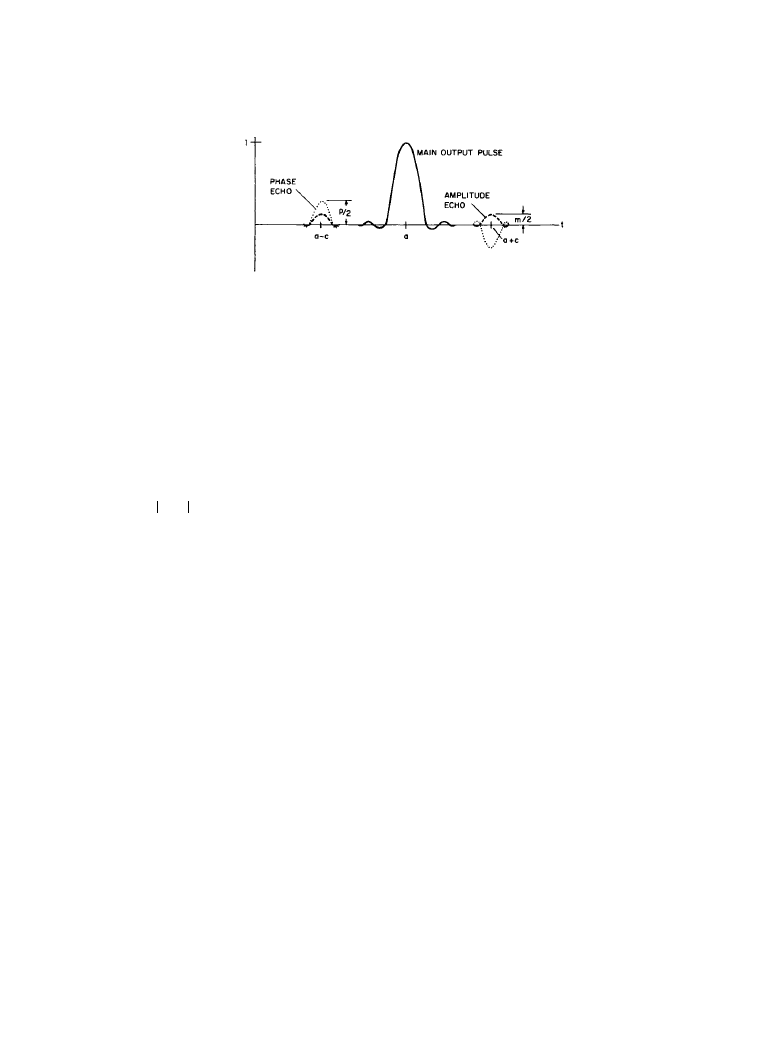
Equation (2.2.16) states that the main portion of the output signal is delayed by a seconds and is
undistorted, but there are, in addition, small preechoes and postechoes (replicas) which flank it,
being advanced and delayed in time (relative to t = a) by c seconds. This is shown in Figure
2.2.14. Amplitude echoes are symmetrical (+ + or – –), but phase echoes are asymmetrical (+ –
or –+). These echoes are the linearly distorted portion of the output and are called echo distor-
tion. The detection of linear distortion by observing paired echoes is possible when the echoes do
not overlap and combine with the undistorted part of the signal to form a new (and linearly dis-
torted) waveshape that may be asymmetrical and have a shifted peak time.
In connection with minimum-phase systems, if the magnitude response varies in frequency as
a cosine function, then the phase response varies as a negative sine function (see Figure 2.2.5
beginning at point 4) as the Hilbert-transform relationship—Equation (2.2.11)—would predict.
(Also, the group delay varies, like the magnitude response, as a cosine function.) This result
H
ω
( )
1
m
ωc
( )
cos
–
=
φ ω
( )
p
ωc
( )
sin
ωa
–
–
=
T
τ
g
ω
( )
a
=
=
g t
( )
f t
a
–
(
)
m
p
–
2
-------------f t
a
c
–
–
(
)
m
p
+
2
-------------f t
a
c
+
–
(
)
+
+
=
Figure 2.2.14
Small preechoes and postechoes are produced at the output of a linear system
having linear distortion in response to a pulse-like input. The main output pulse is delayed by
a
seconds (minimum value of
τ
g
) and undistorted. Nonflat magnitude response produces symmetri-
cal (dashed curves) “amplitude” echoes, whereas group-delay distortion produces unsymmetrical
(dotted curves) “phase” echoes. These echoes
are the linear distortion. In minimum-phase sys-
tems, the noncasual echoes at
t = a – c are equal and opposite and cancel one another. In practi-
cal systems, the echoes may overlap and change the shape of (linearly distort) the main output
pulse.
Downloaded from Digital Engineering Library @ McGraw-Hill (www.digitalengineeringlibrary.com)
Copyright © 2004 The McGraw-Hill Companies. All rights reserved.
Any use is subject to the Terms of Use as given at the website.
Spectral Changes and Linear Distortion
2-48 The Audio Spectrum
implies that m and p in Equation (2.2.15) would be equal and opposite; that is, m = –p. In this
case the preecho vanishes because the last term in Equation (2.2.16) is zero, but the postechoes
reinforce. The impulse responses of many minimum-phase systems can be interpreted on this
basis.
2.2.5b
Classifications of Phase Distortion
When a system is causal, the minimum amount of phase shift
that it can have is prescribed
by the Hilbert-transform relation, Equation (2.2.11). There can be additional or excess phase
shift
as well, so that in general the total phase shift is the sum
(2.2.17)
A practical definition for the excess phase is
(2.2.18)
where
is a constant and
. In Equation (2.2.18)
represents pure time delay,
is the frequency-dependent phase shift of an all-pass filter, and
represents a fre-
quency-independent phase shift caused by, for example, polarity reversal between input and out-
put or a Hilbert transformer which introduces a constant phase shift for all frequencies. The
group delay, defined in Equation (2.2.5), is found by substituting Equation (2.2.18) into Equation
(2.2.17) and differentiating. The result is
(2.2.19a)
(2.2.19b)
φ
m
ω
( )
φ
x
ω
( )
φ ω
( )
φ
m
ω
( ) φ
x
ω
( )
+
=
φ
x
ω
( )
θ
a
ω
( )
ωT θ
0
+
(
)
–
=
θ
0
θ
a
0
( )
0
=
–
ωT
θ
a
ω
( )
θ
0
τ
g
ω
( )
T
d
φ
m
ω
( )
d
ω
-----------------
d
θ
a
ω
( )
d
ω
-----------------
–
–
=
T
τ
gm
ω
( ) τ
ga
ω
( )
+
+
=
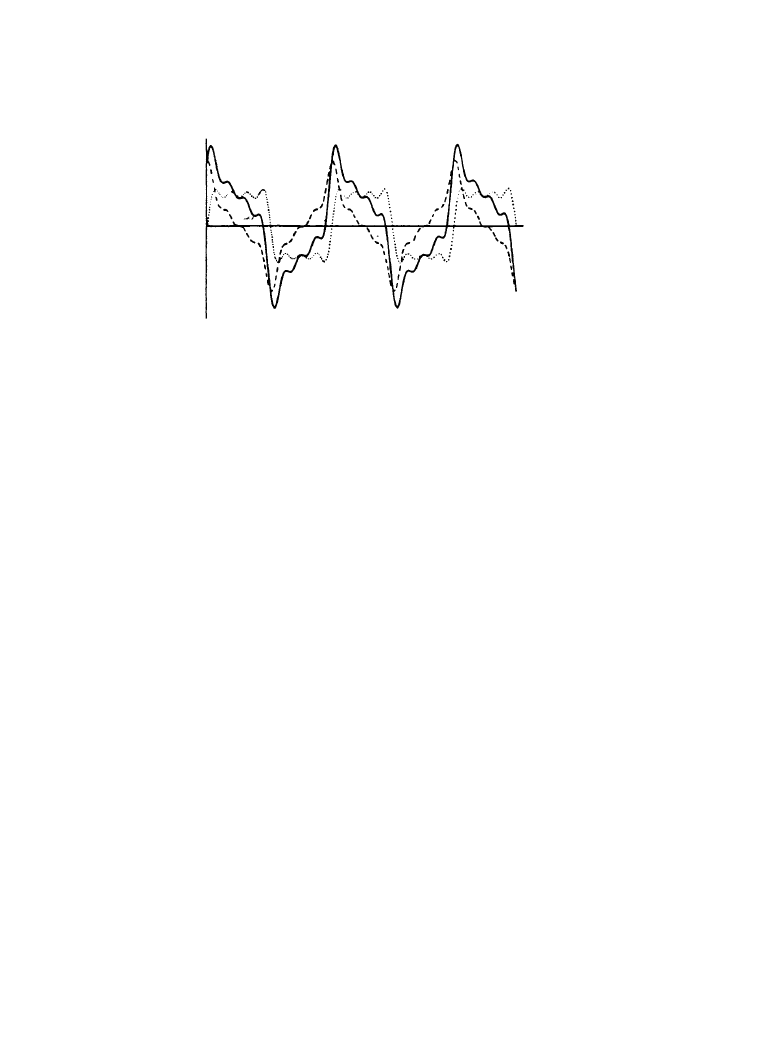
Figure 2.2.15
Band-limited square wave (dotted curve), its Hilbert transform (dashed curve), and
the sum of dotted and dashed curves (solid curve).
Downloaded from Digital Engineering Library @ McGraw-Hill (www.digitalengineeringlibrary.com)
Copyright © 2004 The McGraw-Hill Companies. All rights reserved.
Any use is subject to the Terms of Use as given at the website.
Spectral Changes and Linear Distortion

Spectral Changes and Linear Distortion 2-49
Because deviations of group delay from the constant value T indicate the presence of phase dis-
tortion, group-delay distortion is defined as
(2.2.20)
This definition implies that
∆T
g
(
ω) = 0 is a necessary condition for no phase distortion and, fur-
thermore, that the peak-to-peak excursions of
∆T
g
(
ω) are both a useful indication and a quantita-
tive measure of phase distortion. Although the all-pass group delay
, the minimum-
phase group delay
can be negative, zero, or positive (as can be inferred from the phase
responses in Figure 2.2.7 by examining their negative derivatives).
Note that when
is calculated from
φ(ω) by using Equation (2.2.5), only phase-slope
information is preserved. The phase intercept
is lost through differentiation. This result implies that when
in Equation (2.2.20),
some phase distortion is possible if, for example
[H(
ω) is an ideal integrator] or
[H(
ω) contains a Hilbert transformer]. Thus
and
(or a multiple of
π)
implies no group-delay distortion but a form of phase distortion known as phase-intercept distor-
tion. With reference to Figure 2.2.4, the phase intercept b is zero when the phase delay and group
delay are equal, as stated in Equation (2.2.9), which is the sufficient condition for no phase dis-
tortion. Generally, the total phase distortion produced by a linear system consists of both group-
delay and phase-intercept distortion.
Figure 2.2.15 illustrates phase distortion caused by a frequency-independent phase shift or
phase-intercept distortion. The dotted curve represents a band-limited square wave (sum of the
first four nonzero harmonics), and the dashed curve is the Hilbert transform of the square wave
obtained by shifting the phase of each harmonic
π
/2 rad, or 90°. This constant phase shift of each
harmonic yields a linearly distorted waveshape having a significantly greater peak factor, as
shown. The solid curve is the sum of the square wave and its Hilbert transform. Because corre-
sponding harmonics in this sum are of equal amplitude and in phase quadrature, the solid curve
could have been obtained by scaling the magnitude of the amplitude spectrum of the original
square wave by
and rotating its phase spectrum by 45°. For this example
rad
in Equation (2.2.18).
∆τ
g
ω
( )
τ
gm
ω
( ) τ
ga
ω
( )
+
=
τ
ga
ω
( ) 0
≥
τ
mp
ω
( )
τ
g
ω
( )
φ 0
( )
φ
m
0
( ) θ
0
+
=
∆τ
g
ω
( )
0
=
φ ω
( )
φ
m
ω
( )
π
–
2
------
=
=
φ 0
( )
θ
0
π
2
---
=
=
∆τ
g
ω
( )
0
=
φ 0
( ) 0
≠
2
φ
x
ω
( )
θ
0
π/4
=
=
Downloaded from Digital Engineering Library @ McGraw-Hill (www.digitalengineeringlibrary.com)
Copyright © 2004 The McGraw-Hill Companies. All rights reserved.
Any use is subject to the Terms of Use as given at the website.
Spectral Changes and Linear Distortion

2-50 The Audio Spectrum
In summary, there are two classifications of phase distortion: 1) group-delay distortion, which
is due to the minimum-phase response and/or the frequency-dependent all-pass portion of the
excess phase response; and 2) phase-intercept distortion, which is caused by a fixed or constant
(frequency-independent) phase shift for all frequencies.
2.2.6
Bibliography
Bendat, J. S., and A. G. Riersol: Engineering Applications of Correlation and Spectral Analysis,
Wiley, New York, 1980.
Bendat, J. S., and A. G. Piersol: Random Data: Analysis and Measurement Procedures, Wiley-
Interscience, New York, N.Y., 1971.
Blinchikoff, H. J., and A. I. Zverev: Filtering in the Time and Frequency Domains, Wiley, New
York, N.Y., 1976.
Bloom, P. J., and D. Preis: “Perceptual Identification and Discrimination of Phase Distortions,”
IEEE ICASSP Proc., pp. 1396–1399, April 1983.
Bode, H. W.: Network Analysis and Feedback Amplifier Design, Van Nostrand, New York, N.Y.,
1945.
Cheng, D. K.: Analysis of Linear Systems, Addison-Wesley, Reading, Mass., 1961.
Deer, J. A., P. J. Bloom, and D. Preis: “Perception of Phase Distortion in All-Pass Filters,” J.
Audio Eng. Soc., vol. 33, no. 10, pp. 782–786, October 1985.
Di Toro. M. J.: “Phase and Amplitude Distortion in Linear Networks,” Proc. IRE, vol. 36, pp.
24–36, January 1948.
Guillemin, E. A.: Communication Networks, vol. 11, Wiley, New York, N.Y., 1935.
Henderson. K. W., and W. H. Kautz: “Transient Response of Conventional Filters,” IRE Trans.
Circuit Theory, CT-5, pp. 333–347, December 1958.
Hewlett-Packard: “Application Note 63—Section II, Appendix A, “Table of Important Trans-
forms,” Hewlett-Packard, Palo Alto, Calif, pp. 37, 38, 1954.
Kupfmuller, K.: Die Systemtheorie der elektrischen Nachrichtenuhertragung, S. Hirzel Verlag,
Stuttgart, 1968.
Lane, C. E.: “Phase Distortion in Telephone Apparatus,” Bell Syst. Tech. J., vol. 9, pp. 493–521,
July 1930.
Lathi, B. P.: Signals, Systems and Communications, Wiley, New York, N.Y., 1965.
Mallinson, J. C.: “Tutorial Review of Magnetic Recording.” Proc. IEEE, vol. 62, pp. 196–208,
February 1976.
Members of the Technical Staff of Bell Telephone Laboratories: Transmission Systems for Com-
munications, 4th ed., Western Electric Company, Technical Publications, Winston-Salem,
N.C., 197 I.
Oppenheim, A. V., and R. W. Schafer: Digital Signal Processing, Prentice-Hall, Englewood
Cliffs, N.J., 1975.
Downloaded from Digital Engineering Library @ McGraw-Hill (www.digitalengineeringlibrary.com)
Copyright © 2004 The McGraw-Hill Companies. All rights reserved.
Any use is subject to the Terms of Use as given at the website.
Spectral Changes and Linear Distortion

Spectral Changes and Linear Distortion 2-51
Papoulis, A.: Signal Analysis, McGraw-Hill, New York, N.Y., 1977.
Peus, S.: “Microphones and Transients,” db Mag., translated from Radio Mentor by S. Temmer,
vol. 11, pp. 35–38, May 1977.
Preis, D: “A Catalog of Frequency and Transient Responses,” J. Audio Eng. Soc., vol. 25, no. 12,
pp. 990–1007, December 1977.
Pries, D.: “Audio Signal Processing with Transversal Filters,” IEEE Conf. Proc., 1979 ICASSP,
pp. 310–313, April 1979.
Preis, D.: “Hilbert-Transformer Side-Chain Phase Equalizer for Analogue Magnetic Recording,”
Electron. Lett., vol. 13, pp. 616–617, September 1977.
Preis, D.: “Impulse Testing and Peak Clipping,” J. Audio Eng. Soc., vol. 25, no. 1, pp. 2–l4, Janu-
ary 1977.
Preis, D.: “Least-Squares Time-Domain Deconvolution for Transversal-Filter Equalizers,” Elec-
tron. Lett., vol. 13, no. 12, pp. 356–357, June 1977.
Preis, D.: “Linear Distortion,” J. Audio Eng. Soc., vol. 24, no. 5, pp. 346–367, June 1976.
Pries, D.: “Measures and Perception of Phase Distortion in Electroacoustical Systems,” IEEE
Conf. Proc., 1980 ICASSP, pp. 490–493, 1980.
Pries, D.: “Phase Equalization for Analogue Magnetic Recorders by Transversal Filtering,” Elec-
tron. Lett., vol. 13, pp. 127–128, March 1977.
Pries, D.: “Phase Equalization for Magnetic Recording,” IEEE Conf. Proc., 198l ICASSP, pp.
790–795, March 1981.
Preis, D.: “Phase Distortion and Phase Equalization in Audio Signal Processing—A Tutorial
Review,” J. Audio Eng Soc., vol. 30, no. 11, pp. 774–794, November 1982.
Pries, D., and C. Bunks: “Three Algorithms for the Design of Transversal-Filter Equalizers,”
Proc. 1981 IEEE Int. Symp. Circuits Sys., pp. 536–539, 1981.
Pries, D., and P. J. Bloom: “Perception of Phase Distortion in Anti-Alias Filters,” J. Audio Eng.
Soc., vol. 32, no. 11, pp. 842–848, November 1984.
Preis, D., F. Hlawatsch, P. J. Bloom, and J. A. Deer: “Wigner Distribution Analysis of Filters with
Perceptible Phase Distortion,” J. Audio Eng. Soc., December 1987.
Small, R. H.: “Closed-Box Loudspeaker Systems, Part 1: Analysis,” J. Audio Eng. Soc., vol. 20,
pp. 798–808, December 1972.
Totzek, U., and D. Press: “How to Measure and Interpret Coherence Loss in Magnetic Record-
ing,” J. Audio Eng. Soc., December 1987.
Totzek, U., D. Preis, and J. F. Boebme: “A Spectral Model for Time-Base Distortions and Mag-
netic Recording,” Archiv. fur Elektronik und Ubertragungstechnik, vol. 41, no. 4, pp. 223–
231, July-August 1987.
Wheeler, H. A.: “The Interpretation of Amplitude and Phase Distortion in Terms of Paired Ech-
oes,” Proc. IRE, vol. 27, pp. 359–385, June 1939.
Williams, A. B.: Active Filter Design, Artech House. Dedham, Mass., 1975.
Downloaded from Digital Engineering Library @ McGraw-Hill (www.digitalengineeringlibrary.com)
Copyright © 2004 The McGraw-Hill Companies. All rights reserved.
Any use is subject to the Terms of Use as given at the website.
Spectral Changes and Linear Distortion