ВУЗ: Казахская Национальная Академия Искусств им. Т. Жургенова
Категория: Книга
Дисциплина: Не указана
Добавлен: 03.02.2019
Просмотров: 21604
Скачиваний: 19
2-42 The Audio Spectrum
stant or flat is important relative to the spectral bandwidth of signals to be processed by the sys-
tem.
2.2.4b
Linear Phase and Minimum Phase
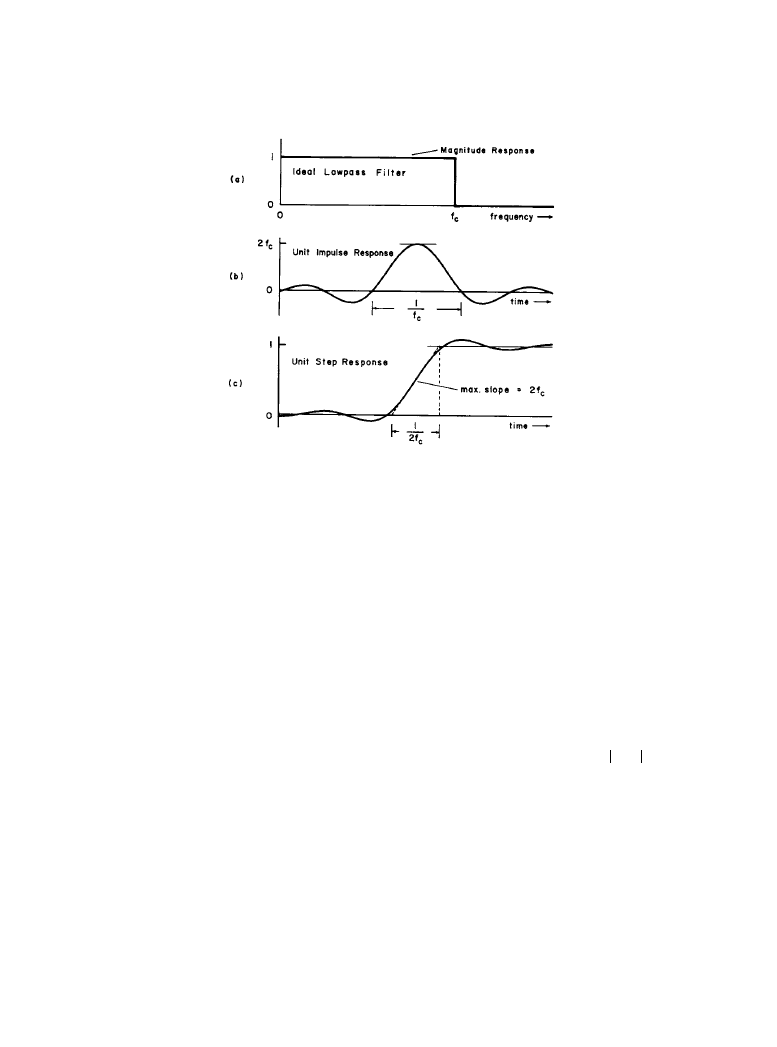
The impulse response of a (distortionless) unity-gain, linear-phase, band-limited (low-pass) sys-
tem is symmetrical in time about its central peak value and described mathematically by
(2.2.10)
where
is the cutoff frequency in hertz. The magnitude response is
, and
the phase response
(a special case of linear phase). This result can be interpreted as a
cophase superposition of cosine waves up to frequency
ω
c
. In general, the group delay for such a
linear-phase system is constant but otherwise arbitrary; that is,
τ
g
(
ω) = T s because the phase
shift
is linear but can have arbitrary slope. Figure 2.10b illustrates h(t) in Equation
(2.2.10) delayed, shifted to the right in time, so that its peak value occurs at, say, a positive time t
= T rather than t = 0. Regardless of the value of T, the impulse response is not causal; that is, it
will have finite values for negative time. So if an impulse excitation
δ(t) were applied to the sys-
tem when t = 0, the response to that impulse would exist for negative time. Such anticipatory
transients violate cause (stimulus) and effect (response). In practice, a causal approximation to
the ideal h(t) in Equation (2.2.10) is realized by introducing sufficient delay T and truncating or
h t
( )
sin
ω
c
t
(
)
πt
-------------------
=
ω
c
/2
π
f
c
=
H
ω
( )
1
=
φ ω
( )
0
=
ϕ ω
( )
ωT
–
=
Figure 2.2.10
Response characteristics: (
a) magnitude response; (b) impulse response; (c) step
response of an ideal linear-phase, band-limited (low-pass) system with cutoff frequency
f
c
Hz.
Downloaded from Digital Engineering Library @ McGraw-Hill (www.digitalengineeringlibrary.com)
Copyright © 2004 The McGraw-Hill Companies. All rights reserved.
Any use is subject to the Terms of Use as given at the website.
Spectral Changes and Linear Distortion
Spectral Changes and Linear Distortion 2-43
“windowing” the response so that it is zero for negative time. This latter process would produce
ripples in the magnitude response, however. Also shown in Figure 2.2.10 are the corresponding
magnitude response (a) and step response (c), which is the integral with respect to time of h(t). In
principle, this ideal system would not linearly distort signals whose spectra are zero for
. In
practice, only approximations to this ideal response are realizable.
A minimum-phase system is causal and has the least amount of phase shift possible corre-
sponding to its specific magnitude response
. The phase is given by the (Hilbert-trans-
form) relationship
(2.2.11)
and the minimum-phase group delay associated with Equation (2.2.11) is
(2.2.12)
While minimum-phase systems have impulse responses that are zero for negative time (causal),
they are not distortionless. Because magnitude and phase responses are interrelated, the linear
distortion they introduce can often be interpreted by using group delay—Equation (2.2.12).
ω ω
c
>
H
ω
( )
φ
m
ω
( )
1
π
---
ln H
ω′
( )
ω′ ω
–
------------------------
∞
–
∞
∫
d
ω′
=
τ
gm
ω
( )
–
d
φ
m
ω
( )
d
ω
-----------------
=
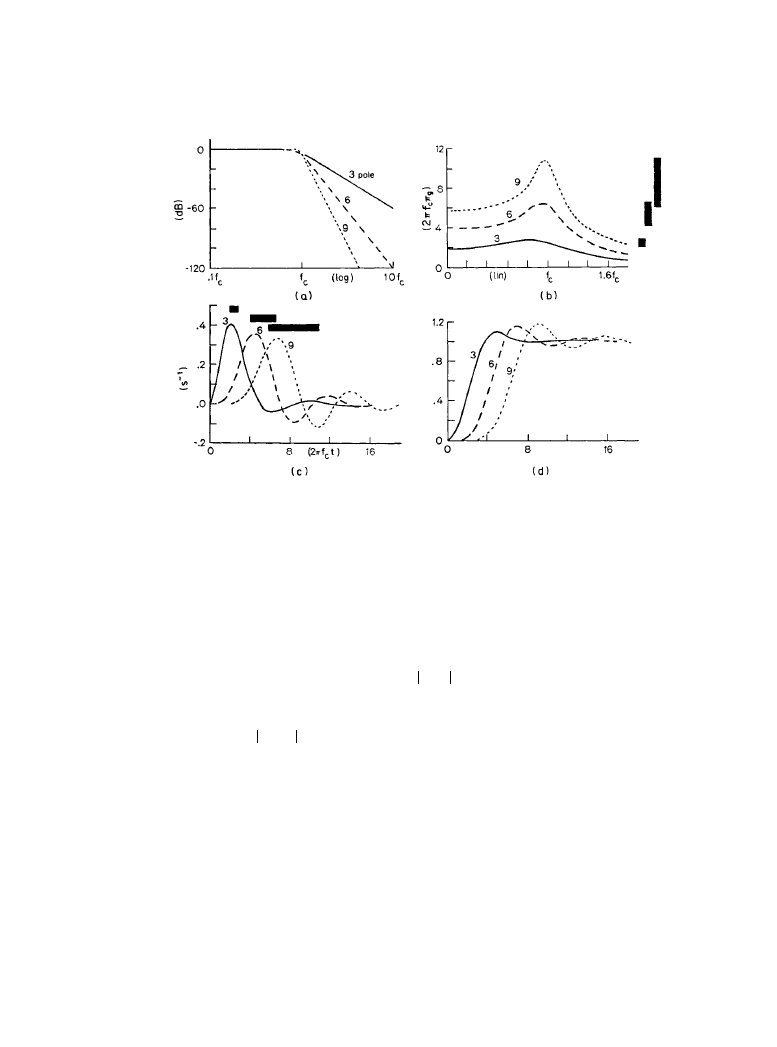
Figure 2.2.11
Response of maximally flat, minimum-phase, low-pass systems: (
a) magnitude, (b)
group delay, (
c) impulse, (d) step.
Downloaded from Digital Engineering Library @ McGraw-Hill (www.digitalengineeringlibrary.com)
Copyright © 2004 The McGraw-Hill Companies. All rights reserved.
Any use is subject to the Terms of Use as given at the website.
Spectral Changes and Linear Distortion
2-44 The Audio Spectrum
In contrast to the preceding example, consider approximations to band limiting using realiz-
able minimum-phase, maximally flat, low-pass systems of successively higher order. The fre-
quency-domain and time-domain responses for three-, six-, and nine-pole systems are plotted in
normalized form in Figure 2.2.11. Here the impulse responses are causal but not symmetrical.
The loss of symmetry is due to group-delay distortion. The group delay changes as frequency
increases, and this implies that phase shift is not proportional to frequency, especially near the
cutoff frequency
. In this example, deviations of
from its low-frequency value are a mea-
sure of group-delay distortion. Note that the maximum deviation of
τ
g
, indicated by the length of
the solid vertical bars in Figure 2.2.11b, is quantitatively related to the broadening of the impulse
response, while the low-frequency value of
predicts the arrival time of the main portion of
the impulse response, as indicated by the position and length of the corresponding solid horizon-
tal bars in Figure 2.2.11c. Actually, the low-frequency value of
equals the time delay of the
center of gravity of the impulse response. By increasing the rate of attenuation above
, the
overall delay of the impulse response increases, initial buildup is slower, ringing is more pro-
nounced, and the response becomes more dispersed and less symmetrical in time.
The minimum-phase group delay
can be evaluated, in theory, for an arbitrary magni-
tude response
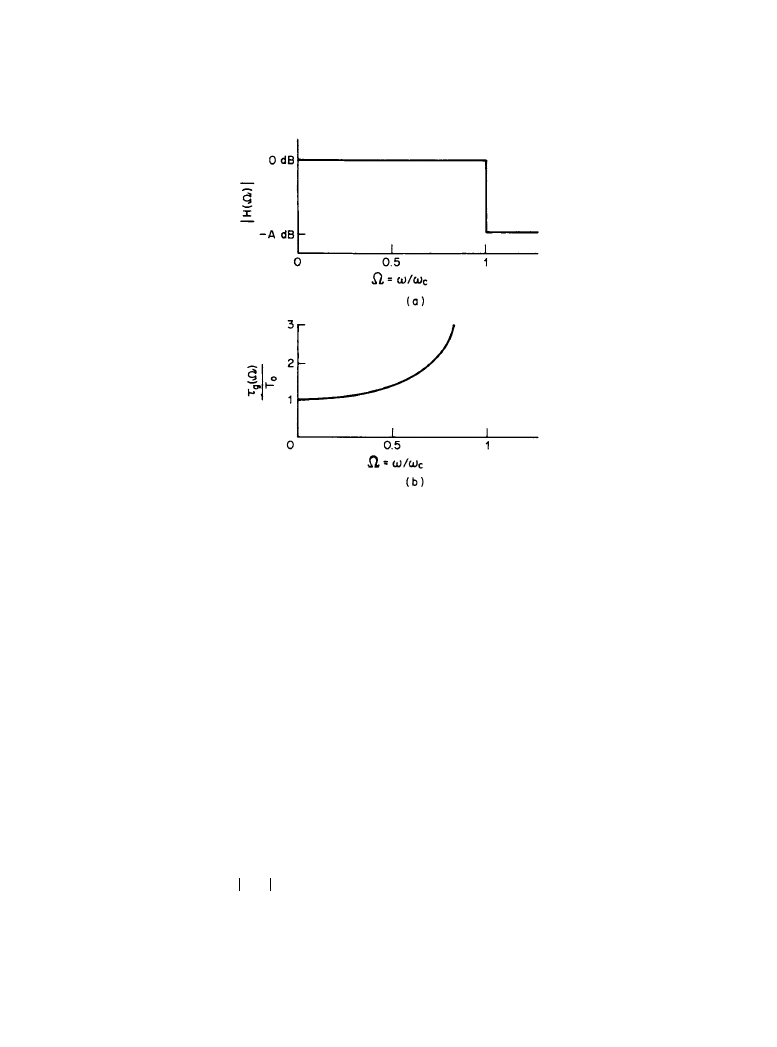
by using Equations (2.2.11) and (2.2.12). Consider, for example, an inter-
esting limiting case of the previous maximally flat low-pass system where an ideal “brick wall”
magnitude response is assumed, as shown in Figure 2.2.12. Here the system has unity gain below
the cutoff
, and A dB of attenuation above
. The normalized frequency
. Although
f
c
τ
g
τ
g
τ
g
f
c
τ
gm
ω
( )
H
ω
( )
ω
c
ω
c
Ω
ω/ω
c
=
Figure 2.2.12
Magnitude and group delay characteristics: (
a) magnitude response of a minimum-
phase low-pass filter with stop-band attenuation of –
A db versus normalized frequency
Ω
=
ω
/
ω
c
,
(
b) normalized group delay of minimum-phase filter in a.
Downloaded from Digital Engineering Library @ McGraw-Hill (www.digitalengineeringlibrary.com)
Copyright © 2004 The McGraw-Hill Companies. All rights reserved.
Any use is subject to the Terms of Use as given at the website.
Spectral Changes and Linear Distortion

Spectral Changes and Linear Distortion 2-45
this magnitude response cannot be realized exactly, it could be approximated closely with an
elliptic filter. The group delay is
(2.2.13)
where the constant
(2.2.14)
As predicted by Equation (2.2.13) and seen in Figure 2.2.12, the group delay becomes infinitely
large at the band edge where
. This is a consequence of the assumed rectangular magni-
tude response. As a specific numerical example, let A = 80 dB and
. Then T
0
=
62
µs and
when
. It is interesting to note that demanding
greater (stop-band) attenuation for
, requires a larger value for the attenuation parameter A,
and
increases, as does the deviation of the group delay within the passband.
A minimum-phase system is also a minimum-delay system since it has the least amount of
phase change for a given magnitude response. (The group delay equals the negative rate of
change of phase with respect to frequency.) Thus, signal energy is released as fast as is physically
possible without violating causality. However, in doing so, certain frequency components are
released sooner than others, and this constitutes a form of phase distortion, sometimes called dis-
persion. Its presence is indicated by deviations of the group delay from a constant value. A lin-
ear-phase system necessarily introduces greater delay than a minimum-phase system with the
same magnitude response. However, it has the advantage that there is no dispersion. This is
accomplished by delaying all frequency components by the same amount of time.
2.2.5
Bandwidth and Rise Time
An important parameter associated with a band-limited low-pass system is the rise time. As illus-
trated in Figures 2.2.10 and 2.2.11, eliminating high frequencies broadens signals in time and
reduces transition times. The step response (response of the system to an input that changes from
0 to 1 when t = 0) shows, in the case of perfect band limiting illustrated in Figure 2.2.10, that the
transition from 0 to 1 requires
. Defining this as the rise time gives the useful
result that the product of bandwidth in hertz and rise time in seconds is
. For
example, with
the rise time is 25
µs. The rise time equals half of the period of the
cutoff frequency (for this perfectly band-limited system).
Practical low-pass systems, such as the minimum-phase systems shown in Figure 2.2.11, do
not have a sharp cutoff frequency, nor do they have perfectly flat group delay like the ideal low-
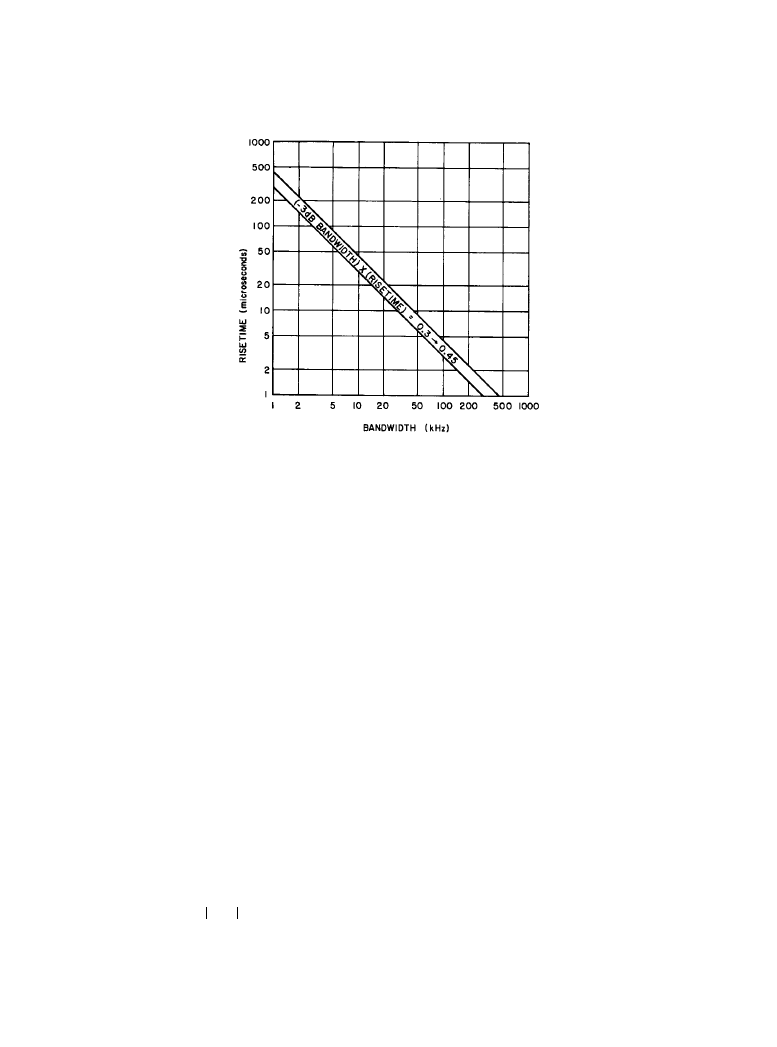
pass model in Figure 2.2.10. The product of the –3-dB bandwidth and the rise time for real sys-
tems usually lies within the range of 0.3 to 0.45. The reason that the rise time is somewhat
shorter (faster) is twofold. Because the cutoff is more gradual, some frequencies beyond the –3-
dB point contribute to the total output response. Also, the rise time to a unit step is convention-
ally defined as the time for the output to change from 10 to 90 percent of its final value.
τ
g
Ω
( )
T
0
1
Ω
2
–
---------------
=
T
0
Aln 10
10
πω
c
----------------
=
ω
ω
c
=
ω
c
/2
π
14 kHz
=
τ
g
ω
( )
0.5 ms
=
ω/ 2π
( ) 14 kHz
≅
ω ω
c
>
τ
g
0
( )
π/ω
c
1/ 2f
c
(
)s
=
f
c
1 2f
c
(
)
×
0.5
=
f
c
20 kHz
=
Downloaded from Digital Engineering Library @ McGraw-Hill (www.digitalengineeringlibrary.com)
Copyright © 2004 The McGraw-Hill Companies. All rights reserved.
Any use is subject to the Terms of Use as given at the website.
Spectral Changes and Linear Distortion
2-46 The Audio Spectrum
Figure 2.2.13 displays this important relationship between rise time and bandwidth. Given the
–3-dB bandwidth of a system, the corresponding range of typically expected rise times can be
read. Conversely, knowing the rise time directly indicates nominal bandwidth requirements.
Within the tolerance strip shown in Figure 2.2.13, fixing the bandwidth always determines the
rise time, and conversely. This figure is a useful guide that relates a frequency-domain measure-
ment (bandwidth) to a time-domain measurement (rise time). This fundamental relationship sug-
gests that testing a practical band-limited linear system with signals having rise times
significantly shorter than the rise time of the linear system itself cannot yield new information
about its transient response. In fact, the system may not be able to process such signals linearly.
The slew rate of a system is the maximum time rate of change (output units/time) for large-
signal nonlinear operation when the output is required to change between extreme minimum and
maximum values. It is not the same as rise time, which is a parameter defined for linear opera-
tion.
2.2.5a
Echo Distortion
Ripples in the magnitude and/or phase of the system function
produce an interesting form
of linear distortion of pulse signals called echo distortion. Assuming that these ripples are small
and sinusoidal, a model for the system function
H
ω
( )
H
ω
( )
H
ω
( ) e
j
φ ω
( )
=
Figure 2.2.13
Relationship between rise time and bandwidth of practical linear systems. For a
given bandwidth, the rise time will lie within the tolerance strip shown; conversely, the bandwidth
requirements for a specific rise time also can be found.
Downloaded from Digital Engineering Library @ McGraw-Hill (www.digitalengineeringlibrary.com)
Copyright © 2004 The McGraw-Hill Companies. All rights reserved.
Any use is subject to the Terms of Use as given at the website.
Spectral Changes and Linear Distortion