ВУЗ: Казахская Национальная Академия Искусств им. Т. Жургенова
Категория: Учебное пособие
Дисциплина: Не указана
Добавлен: 03.02.2019
Просмотров: 17366
Скачиваний: 18
Audio Power Amplifier Design Handbook
Even so, it is puzzling that there seems to have been so little application of
Control Theory to audio amplifier design. The reason may be that so much
Control Theory assumes that you know fairly accurately the characteristics
of what you are trying to control, especially in terms of poles and zeros.
One approach to appreciating negative feedback and its stability problems
is SPICE simulation. Some SPICE simulators have the ability to work in the
Laplace or s-domain, but my own experiences with this have been deeply
unhappy. Otherwise respectable simulator packages output complete
rubbish in this mode. Quite what the issues are here I do not know, but it
does seem that s-domain methods are best avoided. The approach
suggested here instead models poles directly as poles, using RC networks to
generate the time-constants. This requires minimal mathematics and is far
more robust. Almost any SPICE simulator – evaluation versions included –
should be able to handle the simple circuit used here.
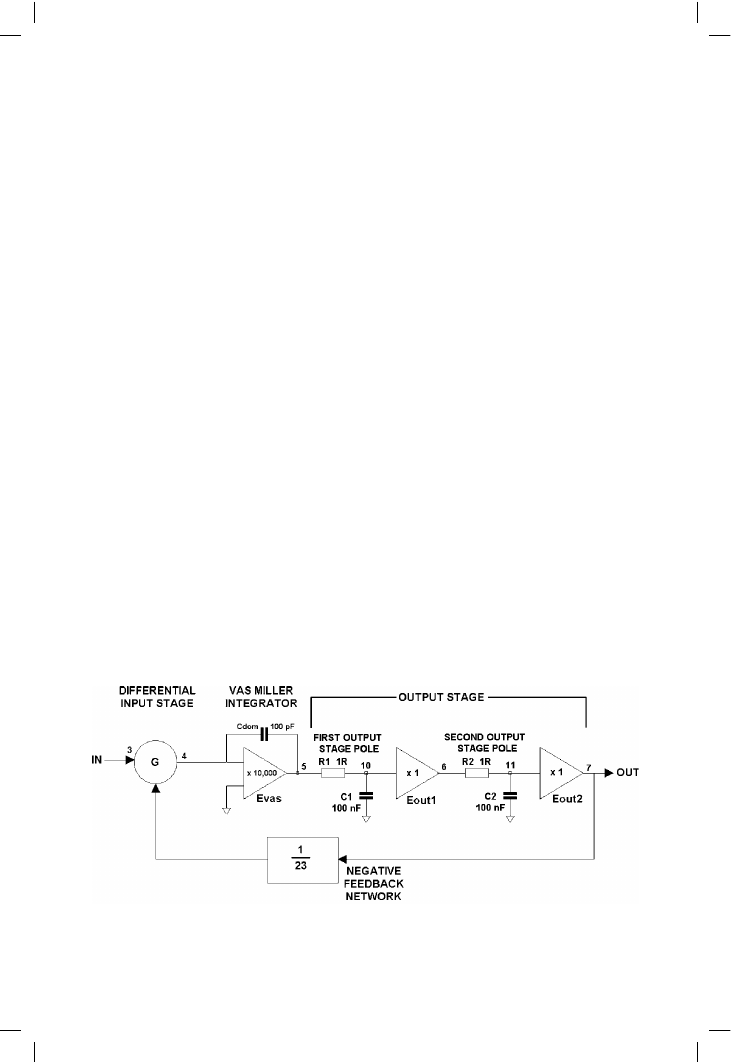
Figure 2.9 shows the basic model, with SPICE node numbers. The scheme
is to idealise the situation enough to highlight the basic issues and exclude
distractions like non-linearities or clipping. The forward gain is simply the
transconductance of the input stage multiplied by the transadmittance of
the VAS integrator. An important point is that with correct parameter values,
the current from the input stage is realistic, and so are all the voltages.
The input differential amplifier is represented by G. This is a standard SPICE
element – the VCIS, or voltage-controlled current source. It is inherently
differential, as the output current from Node 4 is the scaled difference
between the voltages at Nodes 3 and 7. The scaling factor of 0.009 sets the
input stage transconductance (gm) to 9 mA/V, a typical figure for a bipolar
input with some local feedback. Stability in an amplifier depends on the
amount of negative feedback available at 20 kHz. This is set at the design
stage by choosing the input gm and Cdom, which are the only two factors
affecting the open-loop gain (see page 61). In simulation it would be equally
50
Figure 2.9
Block diagram of system for SPICE stability testing

History, architecture and negative feedback
valid to change gm instead; however, in real life it is easier to alter Cdom as
the only other parameter this affects is slew rate. Changing input stage
transconductance is likely to mean altering the standing current and the
amount of local feedback, which will in turn impact input stage linearity.
The VAS with its dominant pole is modelled by the integrator Evas, which
is given a high but finite open-loop gain, so there really is a dominant pole
P1 created when the gain demanded becomes equal to that available. With
Cdom = 100 pF this is below 1 Hz. With infinite (or as near-infinite as SPICE
allows) open-loop gain the stage would be a perfect integrator. A explained
elsewhere, the amount of open-loop gain available in real versions of this
stage is not a well-controlled quantity, and P1 is liable to wander about in
the 1–100 Hz region; fortunately this has no effect at all on HF stability.
Cdom is the Miller capacitor that defines the transadmittance, and since the
input stage has a realistic transconductance Cdom can be set to 100 pF, its
usual real-life value. Even with this simple model we have a nested
feedback loop. This apparent complication here has little effect, so long as
the open-loop gain of the VAS is kept high.
The output stage is modelled as a unity-gain buffer, to which we add extra
poles modelled by R1, C1 and R2, C2. Eout1 is a unity-gain buffer internal
to the output stage model, added so the second pole does not load the first.
The second buffer Eout2 is not strictly necessary as no real loads are being
driven, but it is convenient if extra complications are introduced later. Both
are shown here as a part of the output stage but the first pole could equally
well be due to input stage limitations instead; the order in which the poles
are connected makes no difference to the final output. Strictly speaking, it
would be more accurate to give the output stage a gain of 0.95, but this is
so small a factor that it can be ignored.
The component values here are of course completely unrealistic, and
chosen purely to make the maths simple. It is easy to appreciate that 1 !
and 1 microfarad make up a 1 microsecond time-constant. This is a pole at
159 kHz. Remember that the voltages in the latter half of the circuit are
realistic, but the currents most certainly are not.
The feedback network is represented simply by scaling the output as it is
fed back to the input stage. The closed-loop gain is set to 23 times, which
is representative of most power amplifiers.
Note that this is strictly a linear model, so the slew-rate limiting which is
associated with Miller compensation is not modelled here. It would be
done by placing limits on the amount of current that can flow in and out of
the input stage.
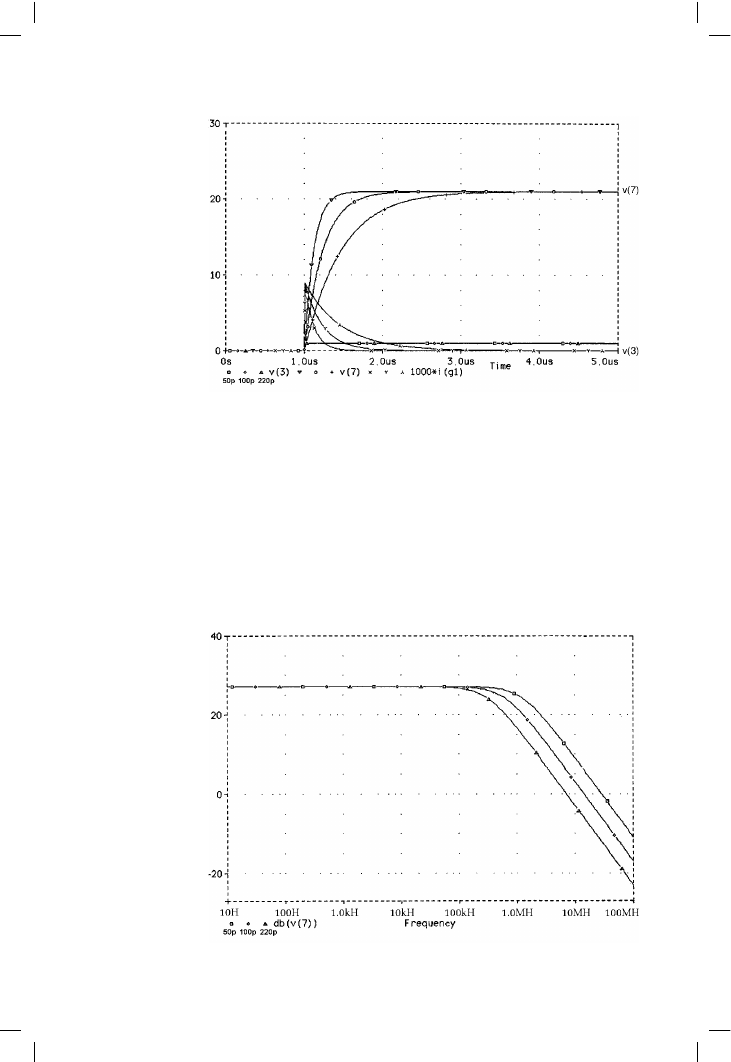
Figure 2.10 shows the response to a 1 volt step input, with the dominant
pole the only time element in the circuit. (The other poles are disabled by
making C1, C2 0.00001 pF, because this is quicker than changing the
actual circuit.) The output is an exponential rise to an asymptote of 23 V,
51
Audio Power Amplifier Design Handbook
which is exactly what elementary theory predicts. The exponential shape
comes from the way that the error signal which drives the integrator
becomes less as the output approaches the desired level. The error, in the
shape of the output current from G, is the smaller signal shown; it has been
multiplied by 1000 to get mA onto the same scale as volts. The speed of
response is inversely proportional to the size of Cdom, and is shown here
for values of 50 pF and 220 pF as well as the standard 100 pF. This
simulation technique works well in the frequency domain, as well as the
time domain. Simply tell SPICE to run an AC simulation instead of a TRANS
(transient) simulation. The frequency response in Figure 2.11 exploits this to
52
Figure 2.10
SPICE results in the
time domain. As
Cdom increases, the
response V(7)
becomes slower, and
the error g(i) declines
more slowly. The input
is the step-function
V(3) at the bottom
Figure 2.11
SPICE simulation in
the frequency domain.
As the compensation
capacitor is
increased, the closed-
loop bandwidth
decreases
proportionally
History, architecture and negative feedback
show how the closed-loop gain in a negative-feedback amplifier depends
on the open-loop gain available. Once more elementary feedback theory is
brought to life. The value of Cdom controls the bandwidth, and it can be
seen that the values used in the simulation do not give a very extended
response compared with a 20 kHz audio bandwidth.
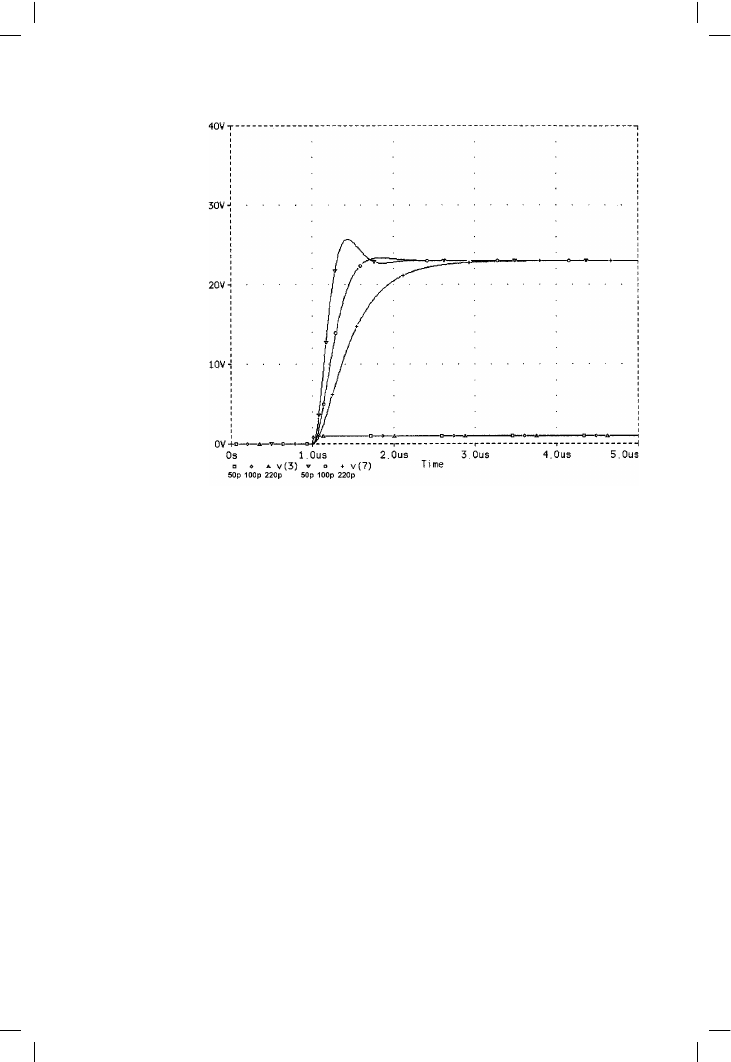
In Figure 2.12, one extra pole P2 at 1.59 MHz (a time-constant of only
100 ns) is added to the output stage, and Cdom stepped through 50, 100
and 200 pF as before. 100 pF shows a slight overshoot that was not there
before; with 50 pF there is a serious overshoot that does not bode well for
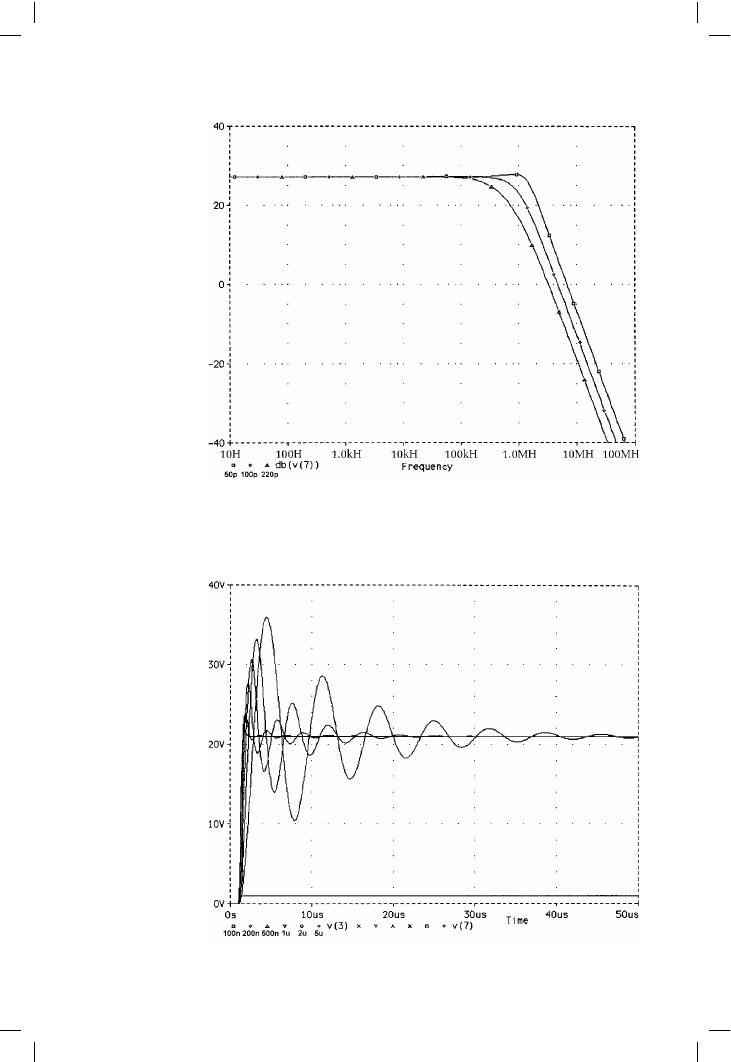
the frequency response. Actually, it’s not that bad; Figure 2.13 returns to the
frequency-response domain to show that an apparently vicious overshoot is
actually associated with a very mild peaking in the frequency domain.
From here on Cdom is left set to 100 pF, its real value in most cases. In
Figure 2.14 P2 is stepped instead, increasing from 100 ns to 5 µs, and while
the response gets slower and shows more overshoot, the system does not
become unstable. The reason is simple: sustained oscillation (as opposed to
transient ringing) in a feedback loop requires positive feedback, which
means that a total phase shift of 180 degrees must have accumulated in the
forward path, and reversed the phase of the feedback connection. With
only two poles in a system the phase shift cannot reach 180 degrees. The
VAS integrator gives a dependable 90 degrees phase shift above P1, being
an integrator, but P2 is instead a simple lag and can only give 90 degrees
phase lag at infinite frequency. So, even this very simple model gives some
53
Figure 2.12
Adding a second
pole P2 causes
overshoot with smaller
values Cdom, but
cannot bring about
sustained oscillation
Audio Power Amplifier Design Handbook
54
Figure 2.13
The frequency
responses that go with
the transient plots of
Fig 2.12. The
response peaking for
Cdom = 50 pF is very
small compared with
the transient overshoot
Figure 2.14
Manipulating the P2
frequency can make
ringing more
prolonged but it is still
not possible to
provoke sustained
oscillation