ВУЗ: Казахская Национальная Академия Искусств им. Т. Жургенова
Категория: Учебное пособие
Дисциплина: Не указана
Добавлен: 03.02.2019
Просмотров: 17367
Скачиваний: 18
History, architecture and negative feedback
insight. Real amplifiers do oscillate if Cdom is too small, so we know that
the frequency response of the output stage cannot be meaningfully
modelled with one simple lag.
A certain president of the United States is alleged to have said: ‘Two wrongs
don’t make a right – so let’s see if three will do it.’ Adding in a third pole
P3 in the shape of another simple lag gives the possibility of sustained
oscillation.
Stepping the value of P2 from 0.1 to 5 µsec with P3 = 500 nsec shows
sustained oscillation starting to occur at P2 = 0.45 µsec. For values such as
P2 = 0.2 µsec the system is stable and shows only damped oscillation.
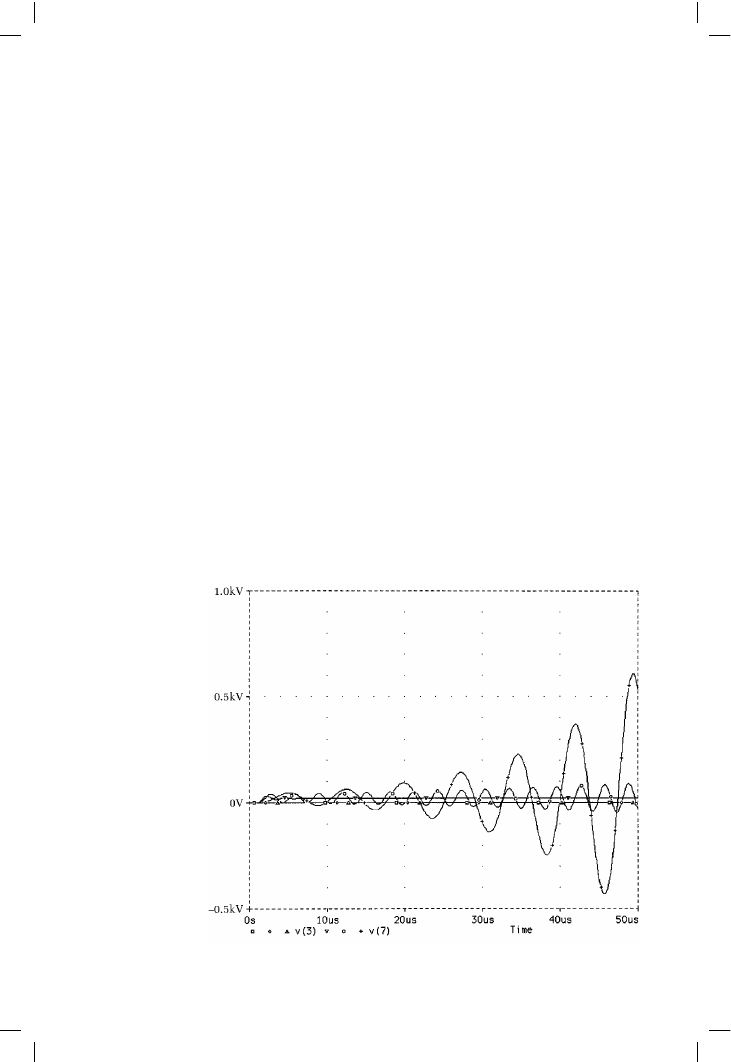
Figure 2.15 shows over 50 µsec what happens when the amplifier is made
very unstable (there are degrees of this) by setting P2 = 5 µsec and P3 =
500 nsec. It still takes time for the oscillation to develop, but exponentially
diverging oscillation like this is a sure sign of disaster. Even in the short time
examined here the amplitude has exceeded a rather theoretical half a
kilovolt. In reality oscillation cannot increase indefinitely, if only because
the supply rail voltages would limit the amplitude. In practice slew-rate
limiting is probably the major controlling factor in the amplitude of high-
frequency oscillation.
We have now modelled a system that will show instability. But does it do
it right? Sadly, no. The oscillation is about 200 kHz, which is a rather lower
frequency than is usually seen when a amplifier misbehaves. This low
55
Figure 2.15
Adding a third pole
makes possible true
instability with
exponentially
increasing amplitude
of oscillation. Note
the unrealistic voltage
scale on this plot
Audio Power Amplifier Design Handbook
frequency stems from the low P2 frequency we have to use to provoke
oscillation; apart from anything else this seems out of line with the known
Ft of power transistors. Practical amplifiers are likely to take off at around
500 kHz to 1 MHz when Cdom is reduced, and this seems to suggest that
phase shift is accumulating quickly at this sort of frequency. One possible
explanation is that there are a large number of poles close together at a
relatively high frequency.
A fourth pole can be simply added to Figure 2.9 by inserting another RC-
buffer combination into the system. With P2 = 0.5 µsec and P3 = P4 =
0.2 µsec, instability occurs at 345 kHz, which is a step towards a realistic
frequency of oscillation. This is case B in Table 2.1.
When a fifth output stage pole is grafted on, so that P3 = P4 = P5 = 0.2 µsec
the system just oscillates at 500 kHz with P2 set to 0.01 usec. This takes us
close to a realistic frequency of oscillation. Rearranging the order of poles
so P2 = P3 = P4 = 0.2 µsec, while P5 = 0.01 µsec, is tidier, and the stability
results are of course the same; this is a linear system so the order does not
matter. This is case C in Table 2.1.
Having P2, P3 and P4 all at the same frequency does not seem very
plausible in physical terms, so case D shows what happens when the five
poles are staggered in frequency. P2 needs to be increased to 0.3 µsec to
start the oscillation, which is now at 400 kHz. Case E is another version
with five poles, showing that if P5 is reduced P2 needs to be doubled to
0.4 µsec for instability to begin.
In the final case F, a sixth pole is added to see if this permitted sustained
oscillation is above 500 kHz. This seems not to be the case; the highest
frequency that could be obtained after a lot of pole-twiddling was 475 kHz.
This makes it clear that this model is of limited accuracy (as indeed are all
models – it is a matter of degree) at high frequencies, and that further
refinement is required to gain further insight.
56
Table 2.1
Instability onset.
P2 is increased
until sustained
oscillation occurs
Case
Cdom
P2
P3
P4
P5
P6
A
100p
0.45
0.5
–
–
200 kHz
B
100p
0.5
0.2
0.2
–
345 kHz
C
100p
0.2
0.2
0.2
0.01
500 kHz
D
100p
0.3
0.2
0.1
0.05
400 kHz
E
100p
0.4
0.2
0.1
0.01
370 kHz
F
100p
0.2
0.2
0.1
0.05
0.02
475 kHz

History, architecture and negative feedback
Maximising the negative feedback factor
Having freed ourselves from Fear of Feedback, and appreciating the
dangers of using only a little of it, the next step is to see how much can be
used. It is my view that the amount of negative feedback applied should be
maximised at all audio frequencies to maximise linearity, and the only limit
is the requirement for reliable HF stability. In fact, global or Nyquist
oscillation is not normally a difficult design problem in power amplifiers;
the HF feedback factor can be calculated simply and accurately, and set to
whatever figure is considered safe. (Local oscillations and parasitics are
beyond the reach of design calculations and simulations, and cause much
more trouble in practice.)
In classical Control Theory, the stability of a servomechanism is specified
by its Phase Margin, the amount of extra phase-shift that would be required
to induce sustained oscillation, and its Gain Margin, the amount by which
the open-loop gain would need to be increased for the same result. These
concepts are not very useful in amplifier work, where many of the
significant time-constants are only vaguely known. However it is worth
remembering that the phase margin will never be better than 90 degrees,
because of the phase-lag caused by the VAS Miller capacitor; fortunately
this is more than adequate.
In practice the designer must use his judgement and experience to
determine an NFB factor that will give reliable stability in production. My
own experience leads me to believe that when the conventional three-stage
architecture is used, 30 dB of global feedback at 20 kHz is safe, providing
an output inductor is used to prevent capacitive loads from eroding the
stability margins. I would say that 40 dB was distinctly risky, and I would
not care to pin it down any more closely than that.
The 30 dB figure assumes simple dominant-pole compensation with a 6 dB/
octave roll-off for the open-loop gain. The phase and gain margins are
determined by the angle at which this slope cuts the horizontal unity-loop-
gain line. (I am deliberately terse here; almost all textbooks give a very full
treatment of this stability criterion.) An intersection of 12 dB/octave is
definitely unstable. Working within this, there are two basic ways in which
to maximise the NFB factor:
1 while a 12 dB/octave gain slope is unstable, intermediate slopes greater
than 6 dB/octave can be made to work. The maximum usable is normally
considered to be 10 dB/octave, which gives a phase margin of 30
degrees. This may be acceptable in some cases, but I think it cuts it a
little fine. The steeper fall in gain means that more NFB is applied at
lower frequencies, and so less distortion is produced. Electronic circuitry
only provides slopes in multiples of 6 dB/octave, so 10 dB/octave
requires multiple overlapping time-constants to approximate a straight
line at an intermediate slope. This gets complicated, and this method of
maximising NFB is not popular,
57

Audio Power Amplifier Design Handbook
2 the gain slope varies with frequency, so that maximum open-loop gain
and hence NFB factor is sustained as long as possible as frequency
increases; the gain then drops quickly, at 12 dB/octave or more, but
flattens out to 6 dB/octave before it reaches the critical unity loop-gain
intersection. In this case the stability margins should be relatively
unchanged compared with the conventional situation. This approach is
dealt with in Chapter 7.
58
Maximising linearity before feedback
Make your amplifier as linear as possible before applying NFB has long
been a clich´e. It blithely ignores the difficulty of running a typical solid-
state amplifier without any feedback, to determine its basic linearity.
Virtually no dependable advice on how to perform this desirable
linearisation has been published. The two factors are the basic linearity of
the forward path, and the amount of negative feedback applied to further
straighten it out. The latter cannot be increased beyond certain limits or
high-frequency stability is put in peril, whereas there seems no reason why
open-loop linearity could not be improved without limit, leading us to what
in some senses must be the ultimate goal – a distortionless amplifier. This
book therefore takes as one of its main aims the understanding and
improvement of open-loop linearity; as it proceeds we will develop circuit
blocks culminating in some practical amplifier designs that exploit the
techniques presented here.
References
1. Lin, H C Transistor Audio Amplifier Electronics, Sept 1956, p. 173.
2. Sweeney & Mantz An Informal History of Amplifiers Audio, June 1988,
p. 46.
3. Linsley-Hood Simple Class-A Amplifier Wireless World, April 1969,
p. 148.
4. Olsson, B Better Audio from Non-Complements? Electronics World,
Dec 1994, p. 988.
5. Attwood, B Design Parameters Important for the Optimisation of PWM
(Class-D) Amplifiers Journ. Audio Eng. Soc. Vol 31 Nov 1983,
p. 842.
6. Goldberg & Sandler Noise Shaping and Pulse-Width Modulation for
All-Digital Audio Power Amplifier Journ. Audio Eng. Soc. Vol 39 Feb
1991, p. 449.
7. Hancock, J A Class-D Amplifier Using MOSFETS with Reduced
Minority Carrier Lifetime Journ. Audio Eng. Soc. Vol 39 Sept 1991,
p. 650.
8. Peters, A Class E RF Amplifiers IEEE Journ of Solid-State Circuits, June
1975, p. 168.
9. Feldman, L Class-G High-Efficiency Hi-Fi Amplifier Radio-Electronics
Aug 1976, p. 47.

History, architecture and negative feedback
10. Raab, F Average Efficiency of Class-G Power Amplifiers IEEE Transac-
tions on Consumer Electronics, Vol CE-22 May 1986, p. 145.
11. Sampei et al Highest Efficiency & Super Quality Audio Amplifier Using
MOS-Power FETs in Class-G IEEE Transactions on Consumer Electron-
ics, Vol CE-24 Aug 1978, p. 300.
12. Buitendijk, P A 40 W Integrated Car Radio Audio Amplifier IEEE
Conf on Consumer Electronics, 1991 Session THAM 12.4, p. 174.
(Class-H)
13. Sandman, A Class S: A Novel Approach to Amplifier Distortion
Wireless World, Sept 1982, p. 38.
14. Sinclair (ed) Audio and Hi-Fi Handbook pub Newnes 1993, p. 541.
15. Walker, P J Current Dumping Audio Amplifier Wireless World, Dec
1975, p. 560.
16. Stochino, G Audio Design Leaps Forward? Electronics World, Oct
1994, p. 818.
17. Tanaka, S A New Biasing Circuit for Class-B Operation Journ. Audio
Eng. Soc. Jan/Feb 1981, p. 27.
18. Mills & Hawksford Transconductance Power Amplifier Systems for
Current-Driven Loudspeakers Journ. Audio Eng. Soc. Vol 37 March
1989, p. 809.
19. Evenson, R Audio Amplifiers with Tailored Output Impedances
Preprint for Nov 1988 AES convention (Los Angeles).
20. Blomley, P A New Approach to Class-B Wireless World, Feb 1971,
p. 57.
21. Gilbert, B Current Mode Circuits from a Translinear Viewpoint Ch 2,
Analogue IC Design: The Current-Mode Approach Ed Toumazou,
Lidgey & Haigh, IEE 1990.
22. Thus Compact Bipolar Class AB Output Stage IEEE Journal of Solid-
State Circuits, Dec 1992 p. 1718.
23. Cherry, E Nested Differentiating Feedback Loops in Simple Audio
Power Amplifiers Journ. Audio Eng. Soc. Vol 30 #5, May 1982,
p. 295.
24. Baxandall, P Audio Power Amplifier Design: Part 5 Wireless World,
Dec 1978, p. 53. (This superb series of articles had 6 parts and ran on
roughly alternate months, starting in Jan 1978.)
59