ВУЗ: Казахская Национальная Академия Искусств им. Т. Жургенова
Категория: Учебное пособие
Дисциплина: Не указана
Добавлен: 03.02.2019
Просмотров: 17382
Скачиваний: 18
The small signal stages
VAS distortion
VAS distortion arises from the fact that the transfer characteristic of a
common-emitter amplifier is curved, being a small portion of an
exponential
[7]
. This characteristic generates predominantly second-har-
monic distortion, which in a closed-loop amplifier will increase at 6 dB/
octave with frequency.
VAS distortion does not get worse for more powerful amplifiers as the stage
traverses a constant proportion of its characteristic as the supply-rails are
increased. This is not true of the input stage; increasing output swing
increases the demands on the transconductance amp as the current to drive
Cdom increases. The increased Vce of the input devices does not
measurably affect their linearity.
It is ironic that VAS distortion only becomes clearly visible when the input
pair is excessively degenerated – a pious intention to linearise before
applying feedback can in fact make the closed-loop distortion worse by
reducing the open-loop gain and hence the NFB factor available to
linearise the VAS. In a real (non-model) amplifier with a distortive output
stage the deterioration will be worse.
Linearising the VAS: active load techniques
As described in Chapter 3, it is important that the local open-loop gain of
the VAS (that existing inside the local feedback loop closed by Cdom) be
high, so that the VAS can be linearised, and therefore a simple resistive load
is unusable.
Increasing the value of Rc will decrease the collector current of the VAS
transistor, reducing its transconductance and getting you back where you
started in terms of voltage gain.
One way to ensure enough local loop gain is to use an active load to
increase the effective collector impedance at TR4 and thus increase the raw
voltage gain; either bootstrapping or a current-source will do this
95
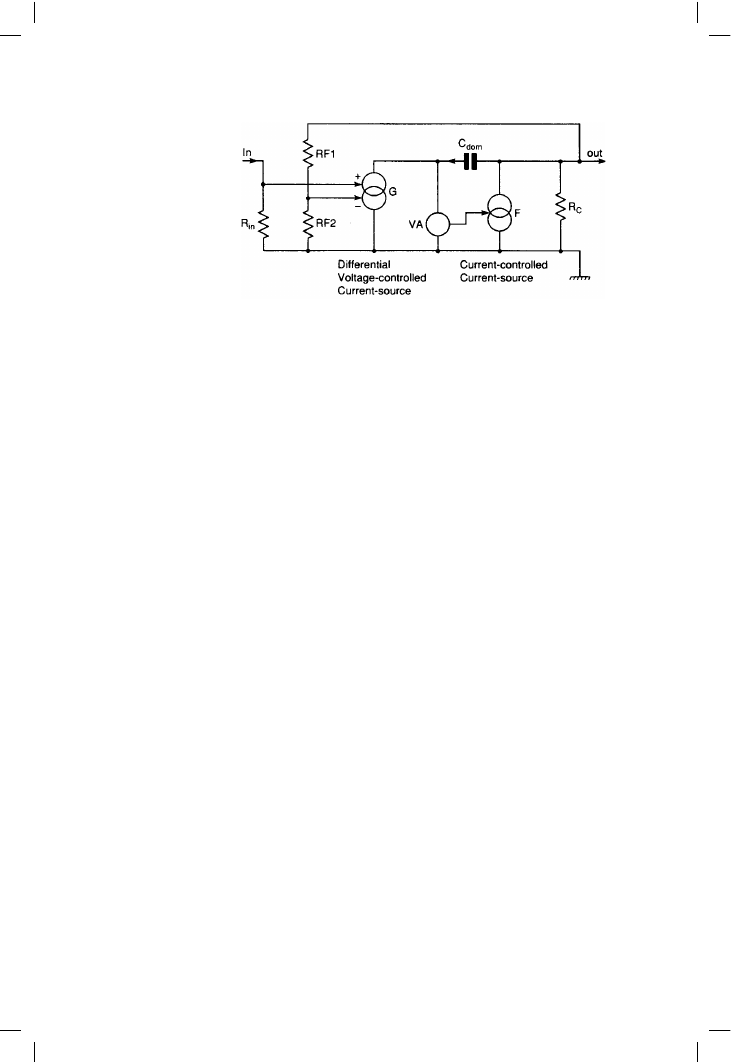
Figure 4.18
Conceptual SPICE
model of differential
input stage (G) and
VAS (F). The current in F
is Beta times the current
in VA

Audio Power Amplifier Design Handbook
effectively, though the current source is perhaps more dependable, and is
the usual choice for hi-fi or professional amplifiers. The Bootstrap promises
more o/p swing, as the collector of TR4 can in theory soar like a lark above
the V+ rail; under some circumstances this can be the overriding concern,
and bootstrapping is alive and well in applications such as automotive
power-amps that must make the best possible use of a restricted supply
voltage
[8]
.
Both active-load techniques have another important role; ensuring that the
VAS stage can source enough current to properly drive the upper half of the
output stage in a positive direction, right up to the rail. If the VAS collector
load was a simple resistor to +V, then this capability would certainly be
lacking.
It may not be immediately obvious how to check that impedance-
enhancing measures are working properly, but it is actually fairly simple.
The VAS collector impedance can be determined by the simple expedient
of shunting the VAS collector to ground with decreasing resistance until the
open-loop gain reading falls by 6 dB, indicating that the collector
impedance is equal to the current value of the test resistor.
The popular current source version is shown in Figure 4.17a. This works
well, though the collector impedance is limited by the effective output
resistance Ro of the VAS and the current source transistors
[9]
, which is
another way of saying that the improvement is limited by Early effect.
It is often stated that this topology provides current-drive to the output
stage; this is only partly true. It is important to realise that once the local
NFB loop has been closed by adding Cdom the impedance at the VAS
output falls at 6 dB/octave for frequencies above P1. With typical values the
impedance is only a few k! – at 10 kHz, and this hardly qualifies as
current-drive at all.
Collector-load bootstrapping (Figure 4.17b) works in most respects as well
as a current source load, for all its old-fashioned look. Conventional
capacitor bootstrapping has been criticised for prolonging recovery from
clipping; I have no evidence to offer on this myself, but one subtle
drawback definitely does exist – with bootstrapping the LF open-loop gain
is dependent on amplifier output loading. The effectiveness of boot-
strapping depends crucially on the output stage gain being unity or very
close to it; however the presence of the output-transistor emitter resistors
means that there will be a load-dependant gain loss in the output stage,
which in turn significantly alters the amount by which the VAS collector
impedance is increased; hence the LF feedback factor is dynamically
altered by the impedance characteristics of the loudspeaker load and the
spectral distribution of the source material. This has a special significance
if the load is an audiophile speaker that may have impedance dips down
to 2 !, in which case the gain loss is serious. If anyone needs a new
96

The small signal stages
audio-impairment mechanism to fret about, then I humbly offer this one in
the confident belief that its effects, while measurable, are not of audible
significance. Possibly this is a more convincing reason for avoiding
bootstrapping than alleged difficulties with recovery from clipping.
Another drawback of bootstrapping is that the standing DC current through
the VAS, and hence the bias generator, varies with rail voltage. Setting and
maintaining the quiescent conditions is quite difficult enough already, so an
extra source of possible variation is decidedly unwelcome.
A less well-known but more dependable form of bootstrapping is available
if the amplifier incorporates a unity-gain buffer between the VAS collector
and the output stage; this is shown in Figure 4.17f, where Rc is the collector
load, defining the VAS collector current by establishing the Vbe of the
buffer transistor across itself. This is constant, and Rc is therefore
bootstrapped and appears to the VAS collector as a constant-current source.
In this sort of topology a VAS current of 3 mA is quite sufficient, compared
with the 6 mA standing current in the buffer stage. The VAS would in fact
work well with lower collector currents down to 1 mA, but this tends to
compromise linearity at the high-frequency, high-voltage corner of the
operating envelope, as the VAS collector current is the only source for
driving current into Cdom.
VAS enhancements
Figure 4.15 shows VAS distortion only, clearly indicating the need for
further improvement over that given inherently by Cdom if our amplifier is
to be as good as possible. The virtuous approach might be to try to
straighten out the curved VAS characteristic, but in practice the simplest
method is to increase the amount of local negative feedback through
Cdom. Equation 1 in Chapter 3 shows that the LF gain (i.e. the gain before
Cdom is connected) is the product of input stage transconductance, TR4
beta and the collector impedance Rc. The last two factors represent the VAS
gain and therefore the amount of local NFB can be augmented by
increasing either. Note that so long as the value of Cdom remains the same,
the global feedback factor at HF is unchanged and so stability is not
affected.
The effective beta of the VAS can be substantially increased by replacing
the VAS transistor with a Darlington, or in other words putting an emitter-
follower before it (Figure 4.17c). Adding an extra stage to a feedback
amplifier always requires thought, because if significant additional phase-
shift is introduced, the global loop stability can suffer. In this case the new
stage is inside the Cdom Miller-loop and so there is little likelihood of
trouble from this. The function of such an emitter-follower is sometimes
described as buffering the input stage from the VAS but its true function is
linearisation by enhancement of local NFB through Cdom.
97
Audio Power Amplifier Design Handbook
Alternatively the VAS collector impedance can be increased to get more
local gain. This is straightforwardly done with a cascode configuration –
(see Figure 4.17d) but it should be said at once that the technique is only
really useful when the VAS is not directly driving a markedly non-linear
impedance . . . such as that at the input of a Class-B output stage.
Otherwise this non-linear loading renders it largely a cosmetic feature.
Assuming for the moment that this problem is dealt with, either by use of
a Class-A output or by VAS-buffering, the drop in distortion is dramatic, as
for the beta-enhancement method. The gain increase is ultimately limited
by Early effect in the cascode and current-source transistors, and more
seriously by the loading effect of the next stage, but it is of the order of 10
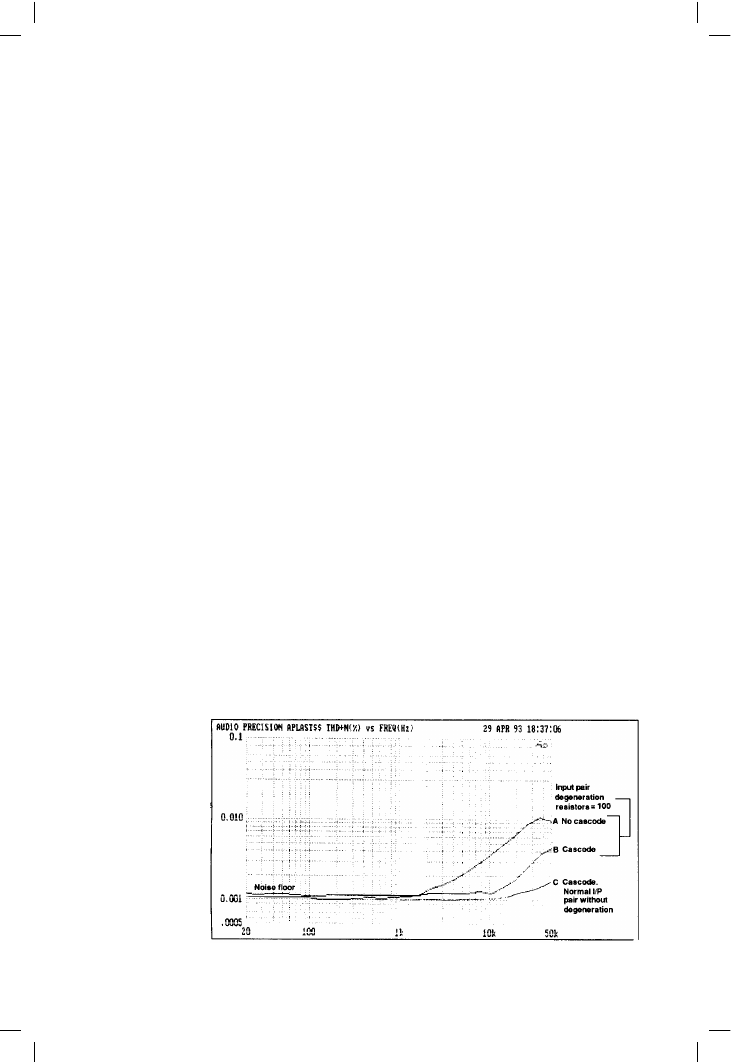
times and gives a useful effect. This is shown by curves A, B in Figure 4.19,
where once more the input stage of a model amplifier has been over-
degenerated with 100 ! emitter resistors to bring out the VAS distortion
more clearly. Note that in both cases the slope of the distortion increase is
6 dB/octave. Curve C shows the result when a standard undegenerated
input pair is combined with the cascoded VAS; the distortion is submerged
in the noise floor for most of the audio band, being well below 0.001%. I
think this justifies my contention that input-stage and VAS distortions need
not be problems; we have all but eliminated Distortions 1 and 2 from the
list of eight in Chapter 3.
Using a cascode transistor also allows the use of a high-beta transistor for
the VAS; these typically have a limited Vceo that cannot withstand the high
rail voltages of a high-power amplifier. There is a small loss of available
voltage swing, but only about 300 mV, which is usually tolerable.
Experiment shows that there is nothing to be gained by cascoding the
current-source collector load.
A cascode topology is often used to improve frequency response, by
isolating the upper collector from the Cbc of the lower transistor. In this
case the frequency response is deliberately defined by Cdom, so this
appears irrelevant, but in fact it is advantageous that Cbc – which carries
98
Figure 4.19
Showing the reduction
of VAS distortion
possible by
cascoding. The results
from adding an
emitter-follower to the
VAS, as an alternative
method of increasing
local VAS feedback,
are very similar

The small signal stages
the double demerit of being unpredictable and signal-dependent – is
rendered harmless. Thus compensation is determined only by a well-
defined passive component.
It is hard to say which technique is preferable; the beta-enhancing emitter-
follower circuit is slightly simpler than the cascode version, which requires
extra bias components, but the cost difference is tiny. When wrestling with
these kind of financial decisions it is as well to remember that the cost of
a small-signal transistor is often less than a fiftieth of that of an output
device, and the entire small-signal section of an amplifier usually
represents less than 1% of the total cost, when heavy metal such as the
mains transformer and heatsinks are included.
Note that although the two VAS-linearising approaches look very different,
the basic strategy of increased local feedback is the same. Either method,
properly applied, will linearise a VAS into invisibility.
99
The importance of voltage drive
As explained above, it is fundamental to linear VAS operation that the
collector impedance is high, and not subject to external perturbations. Thus
a Class-B output stage, with large input impedance variations around the
crossover point, is about the worst thing you could connect to it, and it is
a tribute to the general robustness of the standard amplifier configuration
that it can handle this internal unpleasantness gracefully, 100 W/8 !
distortion typically degrading only from 0.0008% to 0.0017% at 1 kHz,
assuming that the avoidable distortions have been eliminated. Note
however that the effect becomes greater as the global feedback-factor is
reduced. There is little deterioration at HF, where other distortions
dominate. To the best of my knowledge I first demonstrated this in reference
10; if I am wrong then I have no doubt I shall soon hear about it.
The VAS buffer is most useful when LF distortion is already low, as it
removes Distortion 4, which is (or should be) only visible when grosser
non-linearities have been seen to. Two equally effective ways of buffering
are shown in Figure 4.17e and f.
There are other potential benefits to VAS buffering. The effect of beta
mismatches in the output stage halves is minimised
[11]
. Voltage drive also
promises the highest fT from the output devices, and therefore potentially
greater stability, though I have no data of my own to offer on this point. It
is right and proper to feel trepidation about inserting another stage in an
amplifier with global feedback, but since this is an emitter-follower its
phase-shift is minimal and it works well in practice.
If we have a VAS buffer then, providing we put it the right way up we can
implement a form of DC-coupled bootstrapping that is electrically very
similar to providing the VAS with a separate current-source. (See Figure
4.17f.)