ВУЗ: Казахская Национальная Академия Искусств им. Т. Жургенова
Категория: Учебное пособие
Дисциплина: Не указана
Добавлен: 03.02.2019
Просмотров: 17425
Скачиваний: 18

Audio Power Amplifier Design Handbook
power would appear to be the critical quantity. Power device ratings often
allow the power and second-breakdown limits (and sometimes the bond-
wire current limit also) to be exceeded for brief periods. If you attempt to
exploit these areas in an audio application, you are living very dangerously,
as the longest excursion specified is usually 5 msec, and a half-cycle at
20 Hz lasts for 25 msec.
From this it can be concluded that a truly ‘difficult’ load impedance is one
with lots of small humps and dips giving significant phase shifts and
increased peak dissipation across most of the audio band. Impedance dips
cause more stress than peaks, as might be expected. Low impedances at the
high-frequency end (above 5 kHz) are particularly undesirable as they will
increase amplifier crossover distortion.
Enhanced loudspeaker currents
When amplifier current capability and loudspeaker loading are discussed it
is often said that it is possible to devise special waveforms that cause a
loudspeaker to draw more transient current than would at first appear to be
possible. This is perfectly true. The issue was raised by Otala et al
[13]
, and
expanded on in Otala and Huttunen
[14]
. The effect was also demonstrated
by Cordell
[15]
.
The effect may be demonstrated with the electrical analogue of a single
speaker unit as shown in Figure 7.26. Rc is the resistance of the voicecoil
and Lc its inductance. Lr and Cr model the cone resonance, with Rr
controlling its damping. These three components simulate the impedance
characteristics of the real electromechanical resonance. The voicecoil
inductance is 0.29 mH, and its resistance 6.8 !, typical for a 10 inch bass
unit of 8 ! nominal impedance. Measurements on this circuit cannot show
an impedance below 6.8 ! at any frequency, and it is easy to assume that
the current demands can therefore never exceed those of a 6.8 !
resistance. This is not so.
The secret of getting unexpectedly high currents flowing is to make use of
the energy stored in the circuit reactances. This is done by applying an
asymmetrical waveform with transitions carefully timed to match the
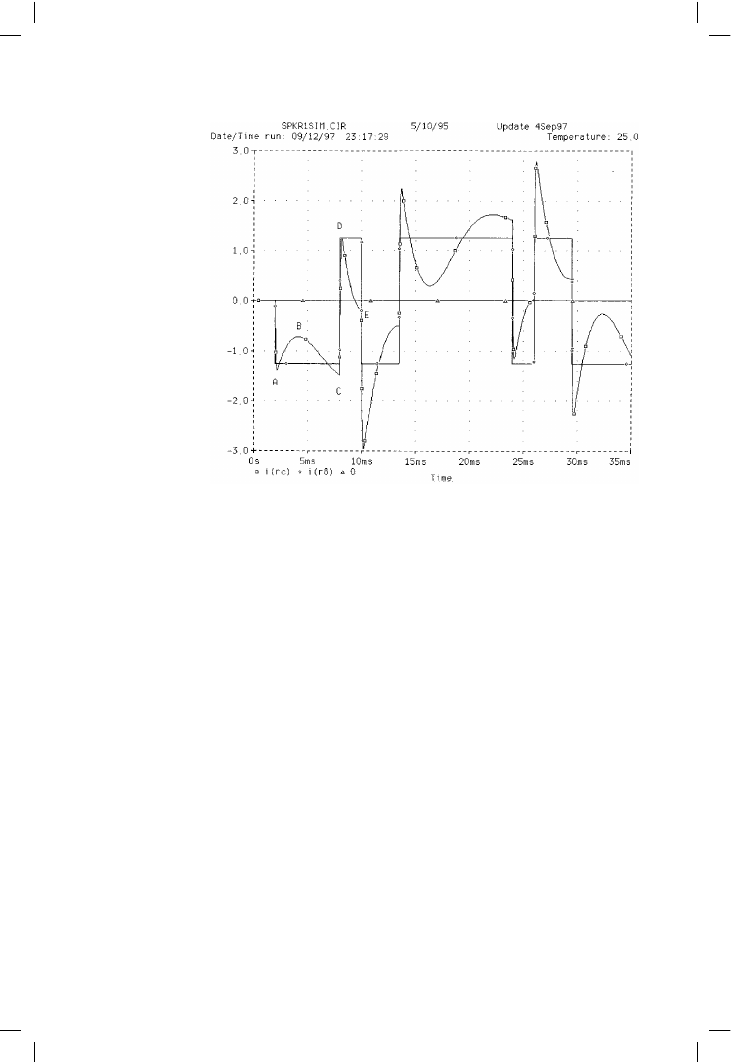
speaker resonance. Figure 7.39 shows PSpice simulation of the currents
drawn by the circuit of Figure 7.26. The rectangular waveform is the current
in a reference 8 ! resistance driven with the same waveform. A +/–10 V
output limit is used here for simplicity but this could obviously be much
higher, depending on the amplifier rail voltages.
At the start of the waveform at A, current flows freely into Cr, reducing to
B as the capacitance charges. Current is also slowly building up in Lr,
causing the total current drawn to increase again to C. A positive transition
to the opposite output voltage then takes the system to point D; this is not
the same state as at A because energy has been stored in Lr during the long
negative period.
220
Compensation, slew-rate, and stability
A carefully timed transition is then made at E, at the lowest point in this part
of the curve. The current change is the same amplitude as at D, but it starts
off from a point where the current is already negative, so the final peak goes
much lower to 2.96 amps, 2.4 times greater than that drawn by the 8 !
resistor. I call this the Current Timing Factor, or CTF.
Otala and Huttunen
[14]
show that the use of multi-way loudspeakers, and
more complex electrical models, allows many more degrees of freedom in
maximising the peak current. They quote a worst case CTF of 6.6 times. An
amplifier driving 50 W into 8 ! must supply a peak current into an 8 !
resistance of 3.53 amps; amplifiers are usually designed to drive 4 ! or
lower to allow for impedance dips and this means the peak current
capability must be at least 7.1 amps. However, a CTF of implies that the
peak capability should be at least 23 amps. This peak current need only be
delivered for less than a millisecond, but it could complicate the design of
protection circuitry.
The vital features of the provocative waveform are the fast transitions and
their asymmetrical timing. The optimal transition timing for high currents
varies with the speaker parameters. The waveform in Figure 7.39 uses
ramped transitions lasting 10 µsec; if these transitions are made longer the
peak currents are reduced. There is little change up to 100 µsec, but with
transitions lengthened to 500 µsec the CTF is reduced from 2.4 to 2.1.
Without doing an exhaustive survey, it is impossible to know how many
power amplifiers can supply six times the nominal peak current required.
221
Figure 7.39
An asymmetrical
waveform to generate
enhanced speaker
currents. The sequence
ABCDE generates a
negative current spike;
to the right, the inverse
sequence produces a
positive spike. The
rectangular waveform
is the current through
an 8 ! resistive load
Audio Power Amplifier Design Handbook
I suspect there are not many. Is this therefore a neglected cause of real
audible impairment? I think not, because:
1 Music signals do not contain high-level rectangular waveforms, nor
trapezoidal approximations to them. A useful investigation would be a
statistical evaluation of how often (if ever) waveforms giving significant
peak current enhancement occur. As an informal test, I spent some time
staring at a digital scope connected to general-purpose rock music, and
saw nothing resembling the test waveform. Whether the asymmetrical
timings were present is not easy to say; however, the large-amplitude
vertical edges were definitely not.
2 If an amplifier does not have a huge current-peak capability, then the
overload protection circuitry will hopefully operate. If this is of a non-
latching type that works cleanly, the only result will be rare and very brief
periods of clipping distortion when the loudspeaker encounters a
particularly unlucky waveform. Such infrequent transient distortion is
known to be inaudible and this may explain why the current
enhancement effect has attracted relatively little attention so far.
Amplifier instability
Amplifier instability refers to unwanted oscillations at either HF or LF. The
latter is very rare in solid-state amplifiers, though still very much an issue for
valve designers. Instability has to be taken very seriously, because it may not
only destroy the amplifier that hosts it, but also damage the loudspeakers.
Instability at middle frequencies such as 1 kHz is virtually impossible unless
you have a very eccentric design with roll-offs and phase-shifts in the
middle of the audio band.
HF instability
HF instability is probably the most difficult problem that may confront the
amplifier designer, and there are several reasons for this:
1 the most daunting feature of HF oscillation is that under some
circumstances it can cause the destruction of the amplifier in relatively
short order. It is often most inadvisable to let the amplifier sit there
oscillating while you ponder its shortcomings.
BJT amplifiers will suffer overheating because of conduction overlap in the
output devices; it takes time to clear the charge carriers out of the device
junctions. Some designs deal with this better than others, but it is still true
that subjecting a BJT design to prolonged sinewave testing above 20 kHz
should be done with great caution. Internal oscillations may of course have
much higher frequencies than this, and in some cases the output devices
may be heated to destruction in a few seconds. The resistor in the Zobel
network will probably also catch fire.
222

Compensation, slew-rate, and stability
FET amplifiers are less vulnerable to this overlap effect, due to their
different conduction mechanism, but show a much greater tendency to
parasitic oscillation at high frequencies, which can be equally destructive.
Under high-amplitude oscillation plastic-package FETs may fail explo-
sively; this is usually a prompt failure within a second or so and leaves very
little time to hit the off switch.
2 various sub-sections of the amplifier may go into oscillation on their own
account, even if the global feedback loop is stable against Nyquist
oscillation. Even a single device may go into parasitic oscillation (e.g.
emitter-followers fed from inappropriate source impedances) and this is
usually at a sufficiently high frequency that it either does not fight its way
through to the amplifier output, or does not register on a 20 MHz scope.
The presence of this last kind of parasitic is usually revealed by excessive
and unexpected non-linearity,
3 another problem with HF oscillation is that it cannot in general be
modelled theoretically. The exception to this is global Nyquist oscillation,
(i.e. oscillation around the main feedback loop because the phase-shift has
become too great before the loop gain has dropped below unity) which can
be avoided by calculation, simulation, and design. The forward-path gain
and the dominant pole frequency are both easy to calculate, though the
higher pole frequencies that cause phase-shift to accumulate are usually
completely mysterious; to the best of my knowledge virtually no work has
been done on the frequency response of audio amplifier output stages.
Design for Nyquist stability therefore reduces to deciding what feedback
factor at 20 kHz will give reliable stability with various resistive and
reactive loads, and then apportioning the open-loop gain between the
transconductance of the input stage and the transresistance of the VAS.
The other HF oscillations, however, such as parasitics and other more
obscure oscillatory misbehaviour, seem to depend on various unknown or
partly-known second-order effects that are difficult or impossible to deal
with quantitatively and are quite reasonably left out of simulator device
models. This means we are reduced to something not much better than
trial-and-error when faced with a tricky problem.
The CFP output stage has two transistors connected together in a very tight
100% local feedback loop, and there is a clear possibility of oscillation
inside this loop. When it happens, this tends to be benign, at a relatively
high frequency (say 2–10 MHz) with a clear association with one polarity
of half-cycle.
LF instability
Amplifier instability at LF (motorboating) is largely a thing of the past now
that amplifiers are almost invariably designed with DC-coupling through-
out the forward and feedback paths. The theoretical basis for it is exactly as
for HF Nyquist oscillation; when enough phase-shift accumulates at a given
223

Audio Power Amplifier Design Handbook
frequency, there will be oscillation, and it doesn’t matter if that frequency
is 1 Hz or 1 MHz.
At LF things are actually easier, because all the relevant time-constants are
known, or can at least be pinned down to a range of values based on
electrolytic capacitor tolerances, and so the system is designable. The
techniques for dealing with almost any number of LF poles and zeros were
well-known in the valve era, when AC coupling between stages was
usually unavoidable, because of the large DC voltage difference between
the anode of one stage and the grid of the next.
Oscillation at LF is unlikely to be provoked by awkward load impedances.
This is not true at HF, where a capacitative load can cause serious
instability. However, this problem at least is easily handled by adding an
output inductor.
Speed and slew-rate in audio amplifiers
It seems self-evident that a fast amplifier is a better thing to have than a slow
one, but – what is a fast amplifier? Closed-loop bandwidth is not a promising
yardstick; it is virtually certain that any power amplifier employing negative
feedback will have a basic closed-loop frequency response handsomely in
excess of any possible aural requirements, even if the overall system
bandwidth is defined at a lower value by earlier filtering.
There is always a lot of loose talk about the importance of an amplifier’s
open-loop bandwidth, much of it depressingly ill-informed. I demon-
strated
[16]
that the frequency of the dominant pole P1 that sets the open-loop
bandwidth is a variable and rather shifty quantity that depends on transistor
beta and other ill-defined parameters. (I also showed how it can be cynically
manipulated to make it higher by reducing open-loop gain below P1.) While
P1 may vary, the actual gain at HF (say 20 kHz) is thankfully a much more
dependable figure that is set only by frequency, input stage trans-
conductance, and the value of Cdom
[17]
. It is this which is the meaningful
figure in describing the amount of NFB that an amplifier enjoys.
The most meaningful definition of an amplifier’s speed is its maximal slew-
rate. The minimum slew-rate for a 100 W/8 ! amplifier to cleanly
reproduce a 20 kHz sinewave is easily calculated as 5.0 V/µsec; so
10 V/µsec is adequate for 400 W/8 !, a power level that takes us somewhat
out of the realms of domestic hi-fi. A safety-margin is desirable, and if we
make this a bare factor of two then it could be logically argued that
20 V/µsec is enough for any hi-fi application; there is in fact a less obvious
but substantial safety-margin already built in, as 20 kHz signals at
maximum level are mercifully rare in music; the amplitude distribution falls
off rapidly at higher frequencies.
Firm recommendations on slew-rate are not common; Peter Baxandall
made measurements of the slew-rate produced by vinyl disc signals, and
224