ВУЗ: Казахская Национальная Академия Искусств им. Т. Жургенова
Категория: Учебное пособие
Дисциплина: Не указана
Добавлен: 03.02.2019
Просмотров: 17421
Скачиваний: 18
Audio Power Amplifier Design Handbook
VAS collector load; as a result its collector is exposed to the full output
swing and the full slew-rate. When an amplifier slews rapidly, there is a
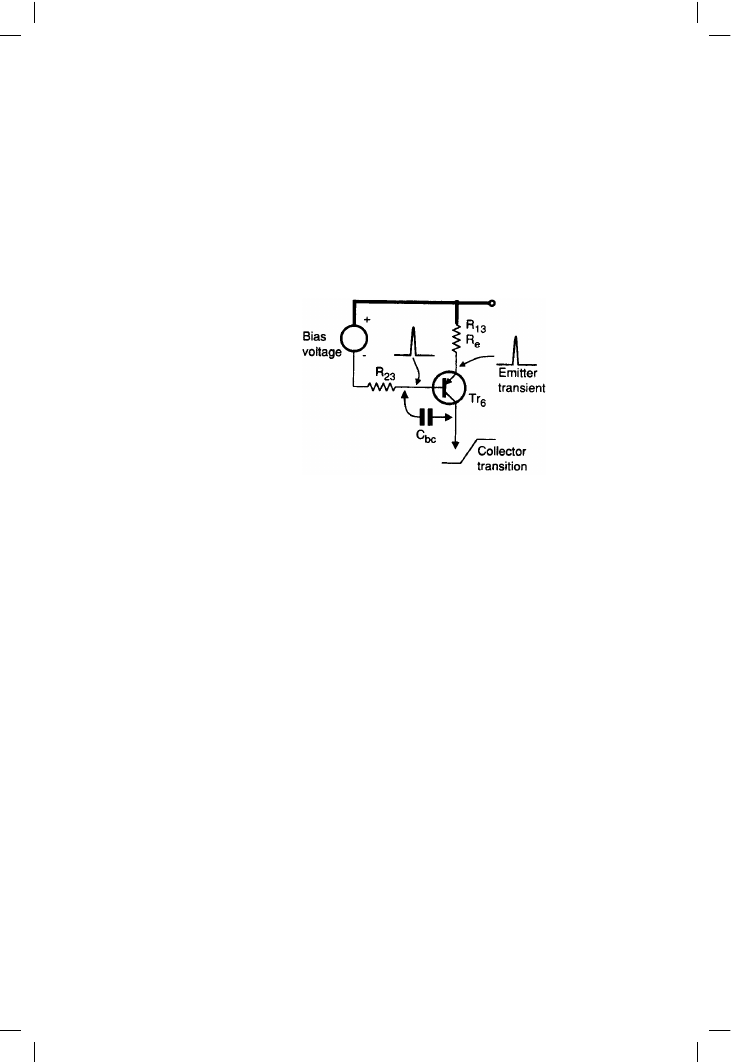
transient feedthrough from the collector to the base (see Figure 7.44) via the
collector-base capacitance. If the base voltage is not tightly fixed then fast
positive slewing drives the base voltage upwards, reducing the voltage on
the emitter and hence the output current. Conversely, for negative slew the
current-source output briefly increases; see Erdi
[22]
. In other words, fast
positive slewing itself reduces the current available to implement it.
Having discovered this hidden constraint, the role of isolation resistor R23
immediately looks suspect. Simulation confirms that its presence worsens
the feedthrough effect by increasing the impedance of the reference voltage
fed to TR5 base. As is usual, the input-stage tail-source TR1 is biased from
the same voltage as TR5; this minor economy complicates things
significantly, as the tail current also varies during fast transients, reducing
for positive slew, and increasing for negative.
Slewing limitations in real life
Bias isolation resistors are not unique to the amplifier of Figure 7.5; they are
very commonly used. For an example taken at random, see Meyer
[23]
. My
own purpose in adding R23 was not to isolate the two current sources from
each other at AC (something it utterly fails to do) but to aid fault-finding.
Without this resistor, if the current in either source drops to zero (e.g. if TR1
fails open-circuit) then the reference voltage collapses, turning off both
sources, and it can be time-consuming to determine which has died and
which has merely come out in sympathy. Accepting this, we return to the
original Figure 7.5 values and replace R23 with a link; the measured slew-
rates at once improve from +21, –48 to +24, –48 (from here on the V/µsec is
omitted). This is already slightly faster than our first attempt at acceleration,
without the thermal penalties of increasing the VAS standing current.
The original amplifier used an active tail-source, with feedback control by
TR14; this was a mere whim, and a pair of diodes gave identical THD
230
Figure 7.44
One reason why
simple theory fails. Fast
positive edges on the
collector of the VAS
source TR6 couple
through the internal
Cbc to momentarily
reduce standing current
Compensation, slew-rate, and stability
figures. It seems likely that reconfiguring the two current-sources so that
the VAS source is the active one would make it more resistant to
feedthrough, as the current-control loop is now around TR5 rather than
TR1, with feedback applied directly to the quantity showing unwanted
variations (see Figure 7.45). There is indeed some improvement, from
+24, –48 to +28, –48.
This change seems to work best when the VAS current is increased, and R4
= 100 R, R13 = 68 R now gives us +37, –52, which is definite progress on
the positive slewing. The negative rate has also slightly increased,
indicating that the tail-current is still being increased by feedthrough effect.
It seems desirable to minimise this transient feedthrough, as it works against
us just at the wrong time. One possibility would be a cascode transistor to
shield TR5 collector from rapid voltage changes; this would require more
biasing components and would reduce the positive output swing, albeit
only slightly.
Since it is the VAS current-source feedthrough capacitance that causes so
much grief, can we turn it against itself, so that an abrupt voltage transition
increases the current available to sustain it, rather than reducing it? Oh yes
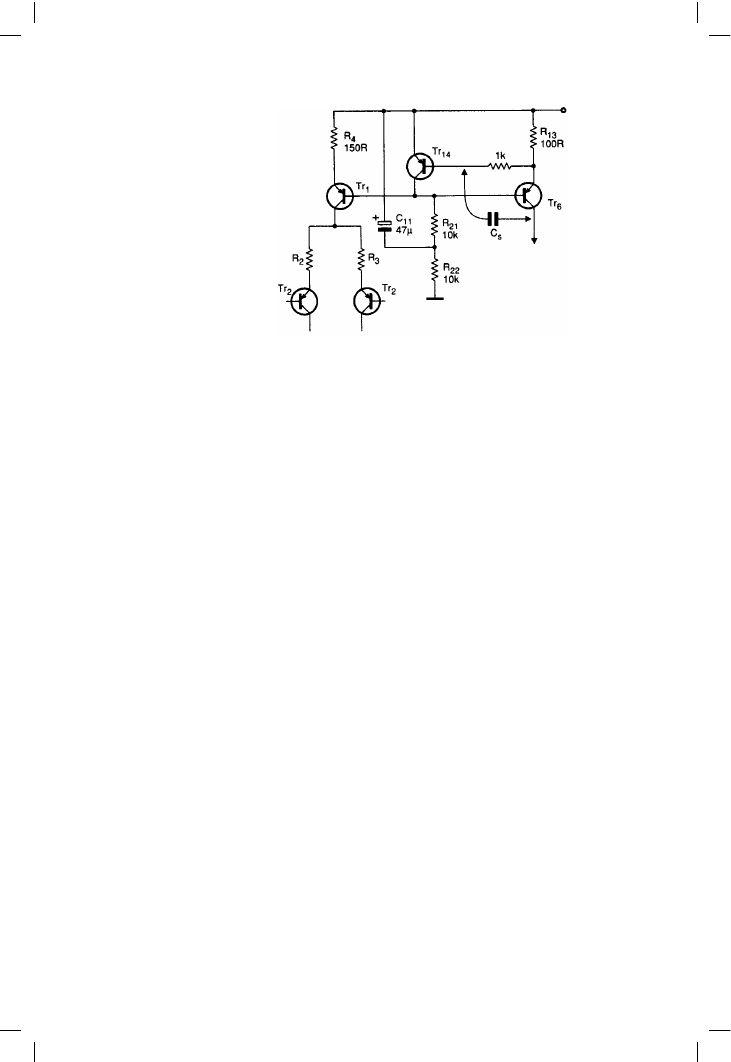
we can, for if a small capacitance Cs is added between TR5 collector
(carrying the full voltage swing) and the sensing point A of the active tail
source, then as the VAS collector swings upward, the base of TR14 is also
driven positive, tending to turn it off and hence increasing the bias applied
to VAS source TR5 via R21. This technique is highly effective, but it smacks
of positive feedback and should be used with caution; Cs must be kept
small. I found 7.5 pF to be the highest value usable without degrading the
amplifier’s HF stability.
With R4 = 100, R13 = 68 adding Cs = 6 pF takes us from +37, –52 to +42,
–43; and the slew asymmetry that has dogged this circuit from the start has
been corrected. Fine adjustment of this capacitance is needful if good slew
symmetry is demanded.
231
Figure 7.45
A modified biasing
system that makes TR6
current the controlled
variable, and reduces
the feedthrough effect

Audio Power Amplifier Design Handbook
Some additional complications
Some other unsuspected effects were uncovered in the pursuit of speed; it is
not widely known that slew-rate is affected both by output loading and the
output stage operating class. For example, above we have noted that R4 =
100, R13 = 68 yields +37, –52 for Class-B and an 8 ! load. With 4 ! loading
this changes to +34, –58, and again the loss in positive speed is the most
significant. If the output stage is biased into Class-A (for an 8 ! load) then we
get +35, –50. The explanation is that the output stage, despite the cascading
of drivers and output devices, draws significant current from the VAS stage.
The drivers draw enough base current in the 4 ! case to divert extra current
from Cdom, and current is in shortest supply during positive slew. The effect
in Class-A is more severe because the output device currents are always high,
the drivers requiring more base current even when quiescent, and again this
will be syphoned off from the VAS collector.
Speeding-up this amplifier would be easier if the Miller capacitor Cdom
was smaller. Does it really need to be that big? Well yes, because if we want
the NFB factor to be reasonably low for dependable HF stability, the HF
loop gain must be limited. Open-loop gain above the dominant pole
frequency P1 is the product of input stage gm with the value of Cdom, and
the gm is already as low as it can reasonably be made by emitter
degeneration. Emitter resistors R2, 3 at 100 ! are large enough to mildly
compromise the input offset voltage, because the tail current splits in two
through a pair of resistors that are unlikely to be matched to better than 1%,
and noise performance is also impaired by this extra resistance in the input
pair emitters. Thus for a given NFB factor at 20 kHz, Cdom is fixed.
Despite these objections, the approach was tested by changing the
distribution of open-loop gain between the input stage and the VAS. R2, 3
were increased from 100 R to 220 R, and Cdom reduced to 66 pF; this does
not give exactly the same NFB factor, but in essence we have halved the
transconductance of the input stage, while doubling the gain of the VAS.
This gain-doubling allows Cdom to be reduced to 66 pF without reduction
of stability margins.
With R4 = 100, R13 = 68 as before, the slew-rate is increased to +50, –50
with Cs = 6 pF to maintain slewing symmetry. This is a 25% increase in
speed rather than the 50% that might be expected from simple theory, and
indicates that other restrictions on speed still exist; in fact PSPICE showed
there are several.
One of these restrictions is as follows; when slewing positively, TR4 and
TR12 must be turned off as fast as possible, by pulling current out of Cdom.
The input pair therefore causes TR10 to be turned on by an increasing
voltage across TR11 and R7. As TR10 turns on, its emitter voltage rises due
to R6, while at the same time the collector voltage must be pulled down to
near the –ve rail to turn off Q4. In the limit TR10 runs out of Vce, and is
232

Compensation, slew-rate, and stability
unable to pull current out of Cdom fast enough. The simplest way to reduce
this problem is to reduce the resistors R6, 7 that degenerate the current-
mirror. This risks HF distortion variations due to input-pair lc imbalance,
but values down to 12 ! have given acceptable results. Once more it is the
positive rate that suffers.
Another way to reduce the value needed for Cdom is to lower the loop-gain
by increasing the feedback network attenuation, or in other words, to run
the amplifier at a higher closed-loop gain. This might be no bad thing; the
current standard of 1 V for full output is (I suspect) due to a desire for low
closed-loop gain in order to maximise the NFB factor, so reducing
distortion. I recall JLH advocating this strategy back in 1974. However, we
must take the world as we find it, and so I have left closed-loop gain alone.
We could of course attenuate the input signal so it can be amplified more,
though I have an uneasy feeling about this sort of thing; amplifying in a pre-
amp then attenuating in the power amp implies a headroom bottleneck, if
such a curdled metaphor is permissible. It might be worth exploring this
approach; this amplifier has good open-loop linearity and I don’t think
excessive THD would be a problem.
Having previously spent some effort on minimising distortion, we do not
wish to compromise the THD of a Blameless amplifier. Mercifully, none of
the modifications set out here have any significant effect on overall THD,
though there may be minor variations around 10–20 kHz.
Further improvements and other configurations
The results I have obtained in my attempts to improve slewing are not at
first sight exactly stunning; however they do have the merit of being as
grittily realistic as I can make them. I set out in the belief that enhancing
slew-rate would be fairly simple; the very reverse has proved to be the case.
It may well be that other VAS configurations, such as the push-pull VAS
examined in Self
[16]
, will prove more amenable to design for rapid slew-
rates; however such topologies have other disadvantages to overcome.
Stochino in a fascinating paper
[24]
has presented a topology, which,
although a good deal more complex than the conventional arrangement,
claims to make slew-rates up to 400 V/µsec achievable.
References
1.
Otala, M An Audio Power Amplifier for Ultimate Quality Require-
ments IEEE Trans on Audio and Electroacoustics, Vol AU-21, No. 6,
Dec 1973.
2.
Baxandall Audio Power Amplifier Design: Part 4 Wireless World,
July 1978, p. 76.
3.
Takahashi et al Design and Construction of High Slew-Rate
Amplifiers AES 60th Convention, Preprint No. 1348 (A-4) 1978.
233

Audio Power Amplifier Design Handbook
4.
Self Crossover Distortion and Compensation Letters, Electronics and
Wireless World, Aug 1992, p. 657.
5.
Widlar, A Monolithic Power Op-Amp IEEE Journal of Solid-State
Circuits, Vol 23, No 2, April 1988.
6.
Bonello Advanced Negative Feedback Design for High Performance
Amplifiers AES 67th Convention, Preprint No. 1706 (D-5) 1980.
7.
Pernici et al A CMOS Low-Distortion Amplifier with Double-Nested
Miller Compensation IEEE J. Solid-State Circuits, July 1993, p. 758.
8.
Scott and Spears On The Advantages of Nested Feedback Loops J.
Audio Eng Soc, Vol 39, March 1991, p. 115.
9.
National Semi Fast Compensation Extends Power Bandwidth Linear
Brief 4, NatSem Linear Apps Handbook, 1991.
10.
Feucht Handbook of Analog Circuit Design Academic Press 1990,
p. 264.
11.
Atkinson, J Review of Krell KSA-50S Power Amplifier Stereophile
Aug 1995, p. 168.
12.
Benjamin, E Audio Power Amplifiers for Loudspeaker Loads Journ.
Audio Eng. Soc. Vol 42, Sept 1994, p. 670.
13.
Otala et al Input Current Requirements of High-Quality Loudspeaker
Systems AES preprint #1987 (D7) for 73rd Convention, March
1983.
14.
Otala and Huttunen Peak Current Requirement of Commercial
Loudspeaker Systems JAES, June 1987, p. 455. See Ch. 12, p. 294.
15.
Cordell, R Interface Intermodulation in Amplifiers Wireless World,
Feb 1983, p. 32.
16.
Self, D Distortion In Power Amplifiers, Part 3 Electronics
World+WW, Oct 1993, p. 824.
17.
Self, D Ibid Part 1 Electronics World+WW, Aug 1993, p. 631.
18.
Baxandall, P Audio Power Amplifier Design Wireless World, Jan
1978, p. 56.
19.
Pass, N Linearity, Slew rates, Damping, Stasis and . . . Hi-Fi News
and RR, Sept 1983, p. 36.
20.
Hughes, J Arcam Alpha5/Alpha6 Amplifier Review Audiophile, Jan
1994, p. 37.
21.
Self, D Distortion In Power Amplifiers, Part 7 Electronics
World+WW, Feb 1994 p. 138.
22.
Erdi, G A 300 v/uS Monolithic Voltage Follower IEEE J. of Solid-State
Circuits, Dec 1979, p. 1062.
23.
Meyer, D Assembling a Universal Tiger Popular Electronics, Oct
1970.
24.
Stochino, G Ultra-Fast Amplifier Electronics World+WW, Oct 1995,
p. 835.
234