ВУЗ: Казахская Национальная Академия Искусств им. Т. Жургенова
Категория: Учебное пособие
Дисциплина: Не указана
Добавлен: 03.02.2019
Просмотров: 17423
Скачиваний: 18
Compensation, slew-rate, and stability
concluded that they could be reproduced by an amplifier with a slew limit
corresponding to maximum output at 2.2 kHz. For the 100 W amplifier this
corresponds to 0.55 V/µsec
[18]
.
Nelson Pass made similar tests, with a moving-magnet (MM) cartridge, and
quoted a not dissimilar maximum of 1 V/µsec at 100 W. A moving-coil (MC)
cartridge doubled this to 2 V/µsec, and Pass reported
[19]
that the absolute
maximum possible with a combination of direct-cut discs and MC
cartridges was 5 V/µsec at 100 W. This is comfortably below the 20 V/µsec
figure arrived at theoretically above; Pass concluded that even if a generous
10:1 factor of safety was adopted, 50 V/µsec would be the highest speed
ever required from a 100 W amplifier.
However, in the real world we must also consider The Numbers Game; if
all else is equal then the faster amplifier is the more saleable. As an example
of this, it has been recently reported in the hi-fi press that a particular
50 W/8 ! amplifier has been upgraded from 20 V/µsec to 40 V/µsec
[20]
and
this is clearly expected to elicit a positive response from intending
purchasers. This report is exceptional, for equipment reviews in the hi-fi
press do not usually include slew-rate measurements. It is therefore difficult
to get a handle on the state of the art, but a trawl through the accumulated
data of years shows that the most highly specified equipment usually
plumps for 50 V/µsec – slew-rates always being quoted in suspiciously
round numbers. There was one isolated claim of 200 V/µsec, but I must
admit to doubts about the reality of this.
The Class-B amplifier shown in Figure 7.5 is that already described in
Chapter 6; the same component numbers have been preserved. This
generic circuit has many advantages, though an inherently good slew
performance is not necessarily one of them; however, it remains the basis
for the overwhelming majority of amplifiers so it seems the obvious place
to start. I have glibly stated that its slew-rate calculated at 40 V/usec, which
by the above arguments is more than adequate. However, let us assume
that a major improvement in slew-rate is required to counter the
propaganda of the Other Amplifier Company down the road, and examine
how it might be done. As in so many areas of life, things will prove much
more complicated than expected.
The basics of amplifier slew-limiting
At the simplest level, slew-rate in a conventional amplifier configuration
like Figure 7.5 depends on getting current in and out of Cdom, (C3) with the
convenient relation:
Slew-rate = I/Cdom V/µsec, for I in µA, Cdom in pF
Equation 7.1
The maximum output frequency for a given slew-rate and voltage is:
Freq max = S
R
/(2
× pi × Vpk) = S
R
/(2
× pi × root2 × Vrms) Equation 7.2
225
Audio Power Amplifier Design Handbook
So, for example, with a slew-rate of 20 V/µsec the maximum freq at
which 35 Vrms can be sustained is 64 kHz, and if Cdom is 100 pF then
the input stage must be able to source and sink 2 mA peak. Likewise, a
sinewave of given amplitude and frequency has a maximum slew-rate (at
zero-crossing) of:
SR of sinewave = dV/dt = "
max
Vpk = 2
× pi × freq × Vpk
Equation 7.3
For Figure 7.5, our slew-rate equation yields 4000/100, or about 40 V/µsec,
as quoted above, if we assume (as all textbooks do) that the only current-
limitation is the tail-source of the input pair. If this differential pair has a
current-mirror collector load – and there are pressing reasons why it should
– then almost the full tail-current is available to service Cdom. This seems
very simple – to increase slew-rate increase the tail-current. But . . .
The tail-current is not the only limit on the slew current in Cdom. (This
point was touched on by Self
[21]
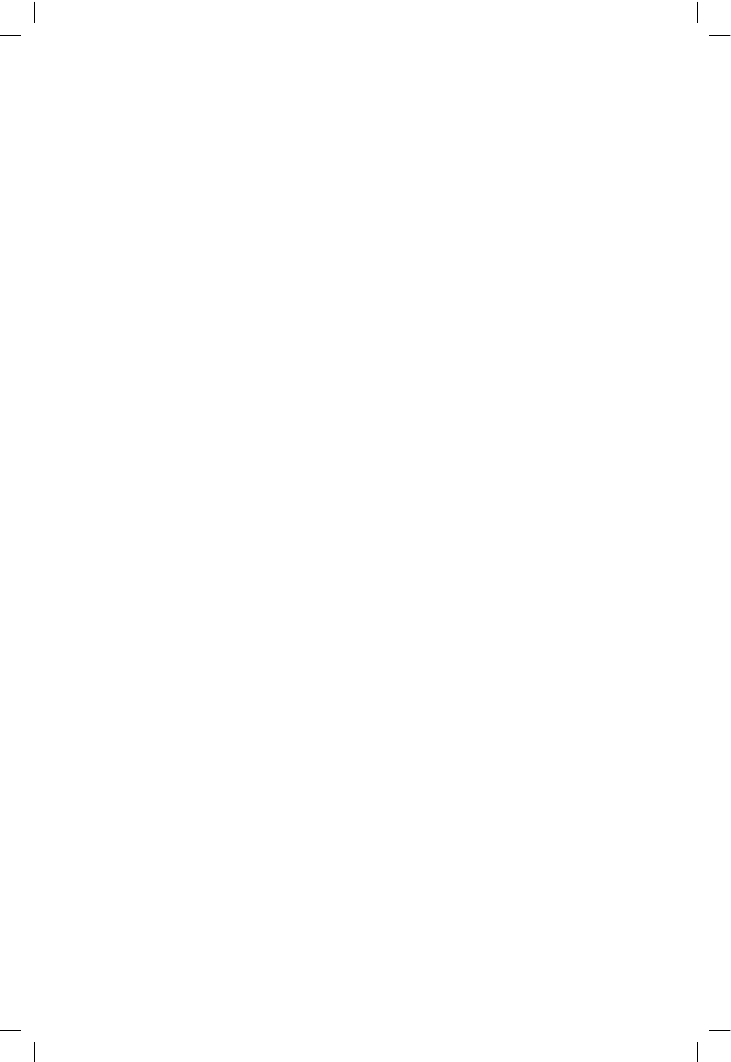
.) Figure 7.40 shows the current paths for
226
Figure 7.40a
The current path for
positive slewing. At the
limit all of the slewing
current has to pass
through the current-
mirror, TR2 being cut
off
Figure 7.40b
The current path at
negative slew limit.
TR2 is saturated and
the current-mirror is cut
off
Compensation, slew-rate, and stability
positive and negative slew-limit, and it can be seen at once that the positive
current can only be supplied by the VAS current-source load. This will
reduce the maximum positive rate, causing slew asymmetry, if the VAS
current-source cannot supply as much current as the tail source. In contrast,
for negative slewing TR4 can turn on as much as required to sink the Cdom
current, and the VAS collector load is not involved.
In most designs the VAS current-source value does not appear to be an
issue, as the VAS is run at a higher current than the input stage to ensure
enough pull-up current for the top half of the output stage; however it will
transpire that the VAS source can still cause problems.
Slew-rate measurement techniques
Directly measuring the edge-slopes of fast square waves from a scope
screen is not easy, and without a delayed timebase it is virtually impossible.
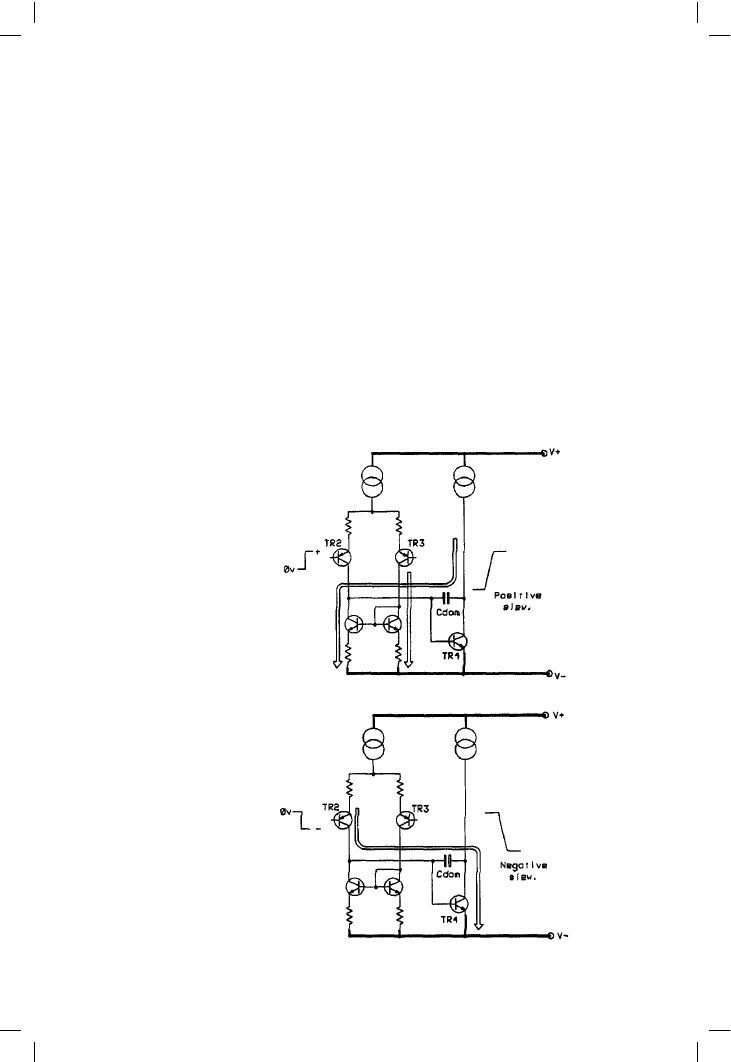
A much easier (and far more accurate) method is to pass the amplifier
output through a suitably-scaled differentiator circuit; slew-rate then
becomes simple amplitude, which is much easier to read from a graticule.
The circuit in Figure 7.41 gives a handy 100 mV output for each V/µsec of
slew; the RC time-constant must be very short for reasonable accuracy. The
differentiator was driven directly by the amplifier, and not via an output
inductor. Be aware that this circuit needs to be coupled to the scope by a
proper
× 10 probe; the capacitance of plain screened cable gives serious
under-readings. We are dealing here with sub-microsecond pulse tech-
niques, so bear in mind that waveform artefacts such as ringing are as likely
to be due to test cabling as to the amplifier.
Applying a fast-edged square wave to an amplifier does not guarantee that
it will show its slew-rate limits. If the error voltage so generated is not
enough to saturate the input stage then the output will be an exponential
response, without non-linear effects. For most of the tests described here,
the amplifier had to be driven hard to ensure that the true slew-limits were
revealed; this is due to the heavy degeneration that reduces the
transconductance of the input pair. Degeneration increases the error
voltage required for saturation, but does not directly alter slew limits.
Running a slew test on the circuit of Figure 7.5, with an 8 ! load, sharply
highlights the inadequacies of simple theory. The differentiator revealed
asymmetrical slew-rates of +21 V/µsec up and –48 V/µsec down, which is
227
Figure 7.41
A simple (but very
useful) differentiator. A
local probe ground is
essential for accuracy
to exceed +/–10%

Audio Power Amplifier Design Handbook
both a letdown and a puzzle considering that the simple theory promises
40 V/µsec. To get results worse than theory predicts is merely the common
lot of the engineer; to simultaneously get results that are better is grounds
for the gravest suspicions.
Improving the slew-rate
Looking again at Figure 7.5, the VAS current-source value is apparently
already bigger than required to source the current Cdom requires when the
input stage is sinking hard, so we confidently decrease R4 to 100 R (to
match R13) in a plausible attempt to accelerate slewing. With considerable
disappointment we discover that the slew-rate only changes to +21 V/µsec,
–62 V/µsec; the negative rate still exceeds the new theoretical value of
60 V/µsec. Just what is wrong here? Honesty compels us to use the lower of
the two figures in our ads, (doesn’t it?) and so the priority is to find out why
the positive slewing is so feeble.
At first it seems unlikely that the VAS current source is the culprit, as with
equal-value R4 and R13, the source should be able to supply all the input
stage can sink. Nonetheless, we can test this cherished belief by increasing
the VAS source current while leaving the tail-current at its original value.
We find that R4 = 150 R, R13 = 68 R gives +23 V/µsec, –48 V/µsec, and this
small but definite increase in positive rate shows clearly there is something
non-obvious going on in the VAS source.
(This straightforward method of slew acceleration by increasing standing
currents means a significant increase in dissipation for the VAS and its
current source. We are in danger of exceeding the capabilities of the TO92
package, leading to a cost increase. The problem is less in the input stage,
as dissipation is split between at least three devices.)
228
Simulating slew-limiting
When circuits turn truculent, it’s time to simplify and simulate. The circuit
was reduced to a model amplifier by replacing the Class-B output stage
with a small-signal Class-A emitter follower; this was then subjected to
some brutally thorough PSPICE simulation, which revealed the various
mechanisms described below.
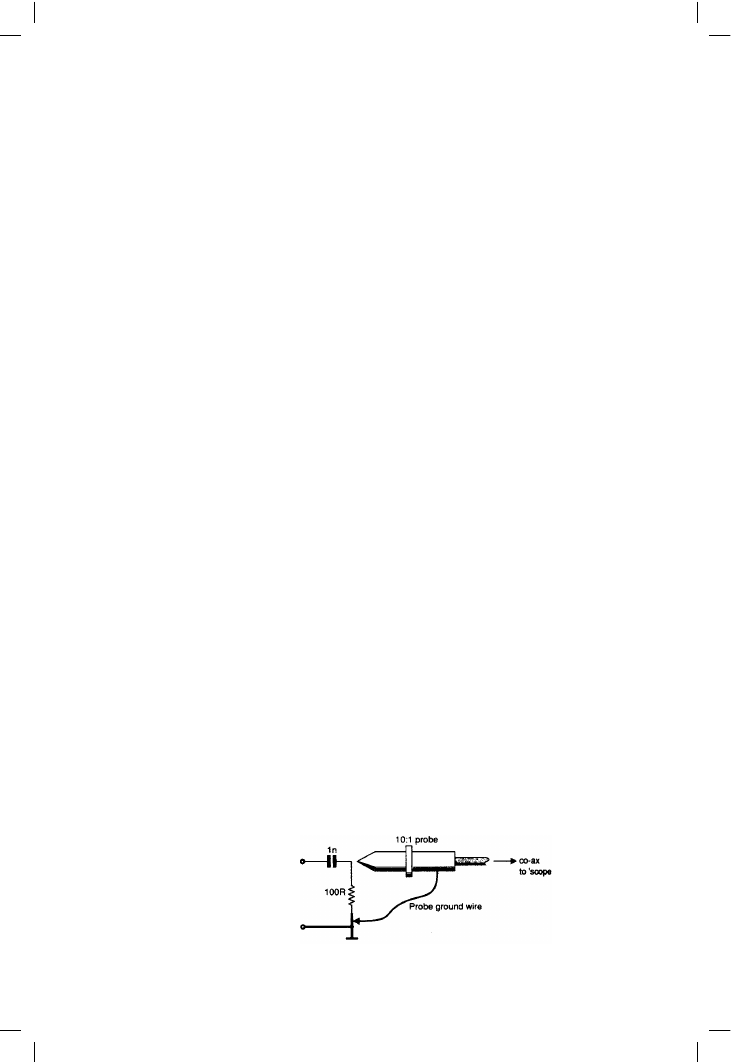
Figure 7.42 shows the positive-going slew of this model amplifier, with both
the actual output voltage and its differential, the latter suitably scaled by
dividing by 10
6
so it can be read directly in V/µsec from the same plot. Figure
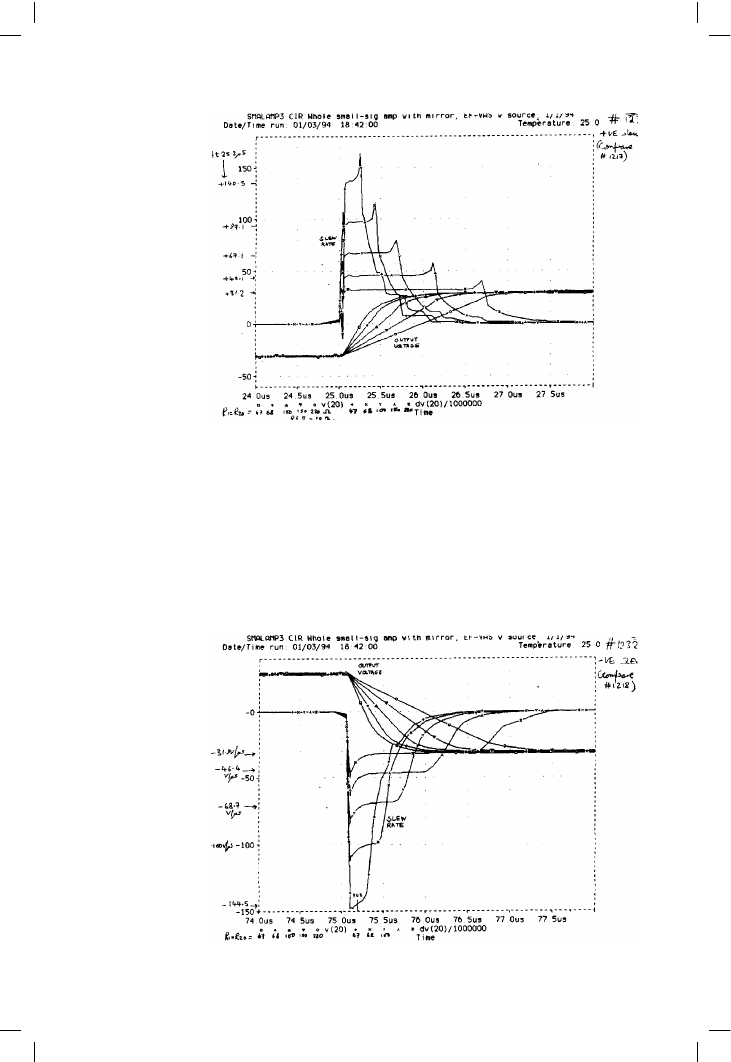
7.43 shows the same for the negative-going slew. The plots are done for a
series of changes to the resistors R4, 23 that set the standing currents.
Several points need to be made about these plots; firstly the slew-rates
shown for the lower R4, 23 values are not obtainable in the real amplifier
with output stage, for reasons that will emerge. Note that almost
Compensation, slew-rate, and stability
imperceptible wobbles in the output voltage put large spikes on the plot of
the slew-rate, and it is unlikely that these are being simulated accurately, if
only because circuit strays are neglected. To get valid slew-rates, read the
flat portions of the differential plots.
Using this method, the first insight into slew-rate asymmetry was obtained.
At audio frequencies, a constant current-source provides a fairly constant
current and that is the end of the matter, making it the usual choice for the
229
Figure 7.42
Positive slewing of
simulated model
amplifier. The lower
traces show the
amplifier output
slewing from –30 to
+30 V while the
upper traces are the
scaled differentiation
Figure 7.43
Negative slewing of
simulated model
amplifier. Increasing
the slew-rate limit
causes a larger part
of the output transient
to become
exponential, as the
input pair spends less
time saturated. Thus
the differential trace
has a shorter flat
period