Файл: Лифтового диспетчерского контроля и связи за электрооборудованием и состоянием пассажирского лифта, приведено обоснование выбора и расчет двигателя электропривода лифта. Определен выбор двигателя электропривода лифта.docx
Добавлен: 30.11.2023
Просмотров: 314
Скачиваний: 9
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
Канатоведущий шкив преобразует вращательное движение в поступательное движение тяговых канатов за счет силы трения, возникающей между канатом и ручьями шкива под действием силы тяжести кабины и противовеса.
Кабина лифта подвешена на тяговых канатах в шахте и предназначена для перевозки пассажиров. Кабина лифта состоит из верхней балки, потолка, пола, створок дверей кабина, привода дверей и балки нижней. На балках установлены: ловители, подвеска кабины, башмаки. Потолок является верхней частью кабины. На потолке размещаются светильники и коробка с блоками зажимов для подключения проводов, а также кнопка деблокирования шахтных дверей, при нажатии на которую возможно движение кабины в режиме ревизии. Естественная вентиляция обеспечивается через вентиляционные отверстия в кабине. Подвеска предназначена для крепления канатов к кабине.
Ловители предназначены для остановки и удержания кабины на направляющих при возрастании скорости движения кабины вниз и при срабатывании ограничителя скорости. Ловители — клиновые, подпружинные, плавного торможения. Ловители рассчитаны на совместную работу с ограничителем скорости и являются одним из ответственных узлов, обеспечивающих безопасное пользование лифтом. Ловители состоят из четырех одинаковых по конструкции механизмов заклинивания и механизма включения ловителей. Механизм заклинивания состоит из тормозного башмака, перемещающегося вертикально относительно колодки, приближаясь при этом к направляющей, основными элементами тормозного башмака являются пружина и клин, установленные в корпусе. Для снятия кабины с ловителей необходимо поднять кабину, тормозные башмаки под действием собственного веса и пружины опускаются и механизмы ловителей возвращаются в первоначальное положение.
Автоматическая дверь кабины гарантирует безопасность пользования кабиной. Положение створок (раздвинуты или закрыты) контролируются электрическим выключателем. Привод дверей кабины по средством которого производится открывание дверей, состоит из червячного редуктора, на тихоходном валу которого насажен рычаг. Привод на резиновых амортизаторах установлен на балке двери кабины. При включении электродвигателя вращение его ротора через клиноременную передачу передается червячному валу редуктора и через червячное зацепление на тихоходный вал. Двери кабины и шахты открываются одновременно.
Двери шахты предназначены для исключения доступа в шахту. Дверь шахты раздвижная автоматическая, приводимая в движение дверью кабины состоит из балки, поперечины, стоек и порога. К верхней части стоек крепятся балка и поперечина, к нижней - порог. На балке установлены линейки, на которых установлены каретки с закрепленными к ним с помощью шпилек створками. Каждая каретка перемещается по линейке на роликах. При расположении кабины в зоне остановки ролики замка находятся между щеками и отводками двери кабины. С началом работы привода открываются замки шахтной двери.
Буфера кабины и противовеса расположены в приямке, который находится ниже уровня отметки нижней остановки. Буфера предназначены для смягчения удара кабины или противовеса в случае их переспуска или падения. Буфера выполненные в виде пружин устанавливаются непосредственно на направляющие кабины, а гидравлические устанавливаются по середине нижней балки кабины. При скорости кабины 1,4 м/с; 1,6 м/с вместо пружинных устанавливаются гидравлические буфера кабины и противовеса.
2. Разработка схемы управления лифтом
2.1 Описание существующей схемы управления лифтом
Принципиальная схема электропривода пассажирского лифта показана на рисунке 2.1.
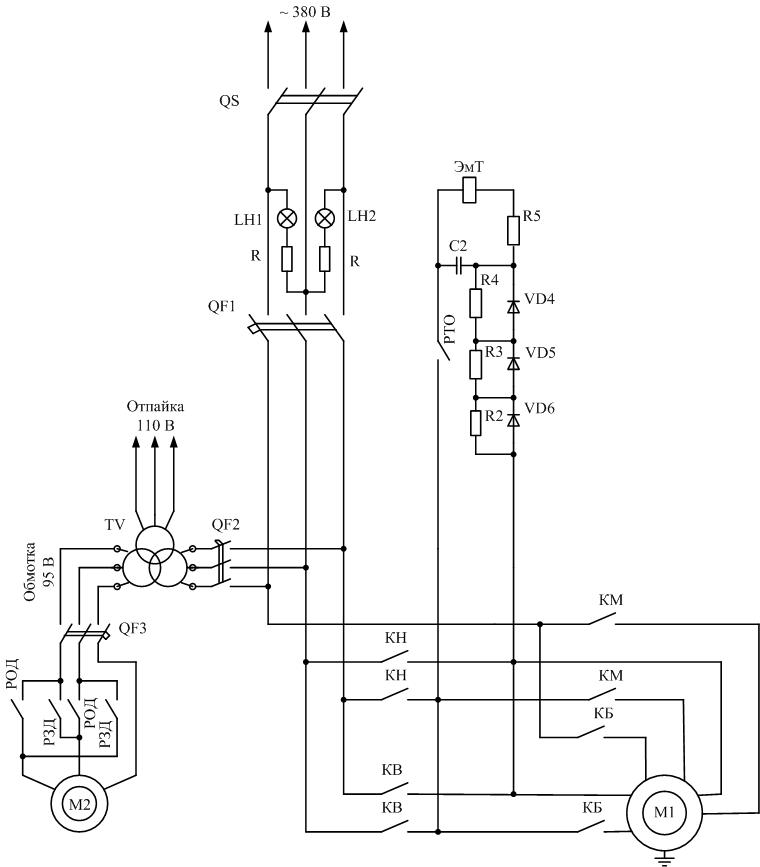
Рисунок 2.1 – Принципиальная схема привода с применением ПЧ
Общий принцип работы лифта следующий: при нажатии кнопки вызывного аппарата в электроаппаратуру управления лифтом подается электрический импульс (вызов). Если кабина находится на остановке, с которой поступил вызов, открываются двери кабины и шахты на данной остановке, если кабина отсутствует, то подается команда на ее движение. В обмотку электродвигателя лебедки и в катушку электромагнита тормоза подается напряжение, колодки тормоза разжимаются, и ротор электродвигателя начинает вращаться, обеспечивая с помощью червячного редуктора вращение канатоведущего шкива, который за счет сил трения приводит в движение кабину и противовес.
При подходе кабины к нужному этажу система управления лифтом переключает электродвигатель лебедки на работу с пониженной частотой вращения ротора. Скорость движения кабины снижается и в момент, когда порог пола кабины совместится с уровнем порога двери шахты, кабина останавливается, включается в работу привод дверей, двери кабины и шахты открываются. При нажатии на кнопку приказа кнопочного поста, расположенного в кабине, закрываются двери кабины и шахты, и кабина отправляются на этаж, кнопка приказа которого нажата. По прибытии на требуемый этаж и выхода пассажиров двери закрываются, и кабина стоит на остановке до тех пор, пока не будет вновь нажата кнопка любого вызывного аппарата.
2.2 Требования к электроприводу лифта
Сформируем требования к электроприводу:
- режим работы повторно-кратковременный;
- реверсивность привода;
- плавность хода и точность остановки ± 3 см;
- высокая надежность и бесперебойность в работе;
- безопасность обслуживания, простота в эксплуатации и ремонте;
- обеспечение плавности пуска и регулирования скорости;
- диапазон регулирования 5:1.
Для питания двигателя используем переменное напряжение 380 В. Для питания релейно-контакторной схемы управления используется постоянное напряжение 110 В. С помощью ПЧ мы можем изменять частоту и величину питающего напряжения, однако максимальная величина напряжения не должна превышать 380 В, а частота не должна превышать 50 Гц. Используя ПЧ для питания АД , мы повышаем коэффициент мощности.
Исходя из вышеизложенных требований, выбираем АД общепромышленной серии, которым заменим двухскоростной АД лифтовой серии. В качестве устройства управления АД , используем ПЧ с векторным управлением без обратной связи по скорости. Для питания двигателя используем переменное напряжение. С помощью ПЧ мы можем изменять частоту и величину питающего напряжения, однако максимальная величина напряжения не должна превышать 380 В, а частота не должна превышать 50 Гц. Используя ПЧ для питания АД, мы повышаем коэффициент мощности.
Исходные данные:
-
пассажирский лифт жилого здания высотой в 16 этажей; -
грузоподъёмность - 400кг; -
модернизируемый механизм –система управления электроприводом; -
тип двигателя – асинхронный, 3х фазный, с короткозамкнутым ротором, АИР112МВ6; -
обеспечивающего номинальную скорость – 1м/с; -
позиционность (поэтажная); -
питающийся от сети переменного тока, напряжением – 380В; -
с частотой сети – 50Гц; -
мощность двигателя – 4 кВт; -
система управления – релейно-контакторная система (РКС), шкаф управления типа ШОК-5906;
2.3 Выбор системы управления электропривода лифта
Чтобы выбрать оптимальную систему управления, необходимо провести анализ существующих систем. Для осуществления автоматического регулирования предусматриваются управляемые преобразователи и регуляторы, позволяющие автоматически под воздействием обратных связей осуществлять регулирование координат электропривода, в нашем случае момента и скорости. Рациональный выбор системы управления приводит к повышению производительности лифта. Система управления может быть организована для контроля непосредственно электропривода (плавность разгона, движения и торможения, точность остановки кабины) и контроля последовательности прохождения лифтом этажей.
Наиболее широко используются электромашинные и вентильные управляемые преобразователи напряжения постоянного тока и частоты переменного тока и соответствующие системы ЭП:
-
система генератор – двигатель (Г-Д); -
система тиристорный преобразователь – двигатель (ТП-Д); -
система преобразователь частоты – асинхронный двигатель (ПЧ-АД).
Все перечисленные системы имеют ряд преимуществ и недостатков, анализ которых, при учете предъявляемых технических требований и специфики производственного механизма позволяет осуществить правильный выбор системы регулирования.
Так, в настоящее время продолжает успешно применяться система Г-Д. Ее основными достоинствами являются отсутствие искажений потребляемого из сети тока и относительно небольшое потребление реактивной мощности. При применении синхронного двигателя в преобразовательном агрегате путем регулирования тока возбуждения можно обеспечить работу ЭП с cos для компенсации реактивной мощности, потребляемой другими установками.
К сожалению, системе Г-Д присущи несколько серьезных недостатков, определяемых необходимостью трехкратного электромеханического преобразования энергии. Как следствие – низкие массогабаритные и энергетические показатели, и благоприятные регулировочные возможности достигаются ценой существенных затрат дефицитной меди, высококачественной стали и труда. Наряду с этим характерен низкий общий КПД системы.
Существенные преимущества асинхронного двигателя определяют несомненную перспективность системы ПЧ-АД. Однако регулирование частоты представляет собой технически более сложную задачу, чем регулирование выпрямленного напряжения, так как, как правило, требует дополнительных ступеней преобразования энергии. Коэффициент полезного действия системы ПЧ-АД ниже, чем в системе ТП-Д, ниже быстродействие и экономичность.
После проведенного анализа существующих систем управления выбрана система ПЧ-АД (преобразователь частоты - асинхронный двигатель). Эта система приносит ряд положительных изменений после модернизации, а именно:
-
плавность пуска и торможения, что позволяет более точно управлять грузом, пропадает необходимость ловить раскачку; -
исчезают пусковые токи, что увеличивает долговременность работы оборудования как электрического, так и механического; -
уход от асинхронных двигателей с фазным ротором, которые требуют большего ухода, а так же менее надежны, чем асинхронные двигатели с короткозамкнутым ротором; -
отсутствие контакторов, которые требуют большого ухода в связи с износом из-за по᠋᠋᠋᠋᠋᠋ۛд᠋᠋᠋᠋᠋᠋ۛгор᠋᠋᠋᠋᠋᠋ۛа᠋᠋᠋᠋᠋᠋ۛн᠋᠋᠋᠋᠋᠋ۛи᠋᠋᠋᠋᠋᠋ۛя контактов, рассыпания по᠋᠋᠋᠋᠋᠋ۛд᠋᠋᠋᠋᠋᠋ۛв᠋᠋᠋᠋᠋᠋ۛи᠋᠋᠋᠋᠋᠋ۛж᠋᠋᠋᠋᠋᠋ۛно᠋᠋᠋᠋᠋᠋ۛго железа , из-за ч᠋᠋᠋᠋᠋᠋ۛастого включения-отключения (облегчается р᠋᠋᠋᠋᠋᠋ۛабот᠋᠋᠋᠋᠋᠋ۛа электротехнического персонала); -
отсутствие шу᠋᠋᠋᠋᠋᠋ۛм᠋᠋᠋᠋᠋᠋ۛа, так как уб᠋᠋᠋᠋᠋᠋ۛир᠋᠋᠋᠋᠋᠋ۛаетс᠋᠋᠋᠋᠋᠋ۛя контакторная система у᠋᠋᠋᠋᠋᠋ۛпр᠋᠋᠋᠋᠋᠋ۛавления.
3 Расчет электропривода п᠋᠋᠋᠋᠋᠋ۛасс᠋᠋᠋᠋᠋᠋ۛа᠋᠋᠋᠋᠋᠋ۛж᠋᠋᠋᠋᠋᠋ۛирс᠋᠋᠋᠋᠋᠋ۛко᠋᠋᠋᠋᠋᠋ۛго лифта
3.1 Расчет тягового ус᠋᠋᠋᠋᠋᠋ۛи᠋᠋᠋᠋᠋᠋ۛл᠋᠋᠋᠋᠋᠋ۛи᠋᠋᠋᠋᠋᠋ۛя привода
Определяем ко᠋᠋᠋᠋᠋᠋ۛл᠋᠋᠋᠋᠋᠋ۛичест᠋᠋᠋᠋᠋᠋ۛво предполагаемых человек в к᠋᠋᠋᠋᠋᠋ۛабине лифта грузоподъемностью 400 к᠋᠋᠋᠋᠋᠋ۛг при высоте з᠋᠋᠋᠋᠋᠋ۛд᠋᠋᠋᠋᠋᠋ۛа᠋᠋᠋᠋᠋᠋ۛн᠋᠋᠋᠋᠋᠋ۛи᠋᠋᠋᠋᠋᠋ۛя в 16 эт᠋᠋᠋᠋᠋᠋ۛа᠋᠋᠋᠋᠋᠋ۛже᠋᠋᠋᠋᠋᠋ۛй и среднем весе че᠋᠋᠋᠋᠋᠋ۛловека 80 кг по фор᠋᠋᠋᠋᠋᠋ۛму᠋᠋᠋᠋᠋᠋ۛле:
Nn=
где Gном – грузо᠋᠋᠋᠋᠋᠋ۛпо᠋᠋᠋᠋᠋᠋ۛдъе᠋᠋᠋᠋᠋᠋ۛм᠋᠋᠋᠋᠋᠋ۛност᠋᠋᠋᠋᠋᠋ۛь
Gном = 400∙9,8 = 3920 Н;
Gпас – вес п᠋᠋᠋᠋᠋᠋ۛасс᠋᠋᠋᠋᠋᠋ۛа᠋᠋᠋᠋᠋᠋ۛж᠋᠋᠋᠋᠋᠋ۛир᠋᠋᠋᠋᠋᠋ۛа
Gпас = 80∙9,8 = 784 Н;
Принимаем ко᠋᠋᠋᠋᠋᠋ۛл᠋᠋᠋᠋᠋᠋ۛичест᠋᠋᠋᠋᠋᠋ۛво предполагаемых остановок Nо=16, ко᠋᠋᠋᠋᠋᠋ۛл᠋᠋᠋᠋᠋᠋ۛичест᠋᠋᠋᠋᠋᠋ۛво человек Nn = 5.
Находим из᠋᠋᠋᠋᠋᠋ۛме᠋᠋᠋᠋᠋᠋ۛне᠋᠋᠋᠋᠋᠋ۛн᠋᠋᠋᠋᠋᠋ۛие груза кабины по эт᠋᠋᠋᠋᠋᠋ۛа᠋᠋᠋᠋᠋᠋ۛж᠋᠋᠋᠋᠋᠋ۛа᠋᠋᠋᠋᠋᠋ۛм по формуле:
ΔG =