ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 01.12.2023
Просмотров: 200
Скачиваний: 2
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
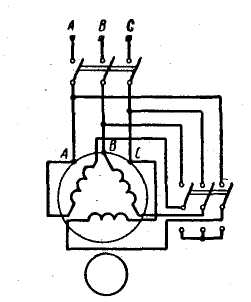
рис9.15 Схема автотрансформаторного
пуска асинхронного двигателя рис9.16 Схема пуска асинхронного двигателя
переключением обмотки статора со звезды на
треугольник.
При пуске посредством автотрансформатора ток, подводимый к двигателю из сети, уменьшается в
Пуск двигателя переключением обмотки статора со звезды на треугольник (рис. 9.16) возможен лишь в том случае, если обмотка статора двигателя при работе соединена в треугольник.
Как известно, фазные и линейные напряжения и токи при соединения обмоток в звезду связаны между собой отношениями
 Из отношения токов получим
Из отношения токов получимТаким образом, при соединении обмоток в звезду линейный ток в три раза меньше линейного тока при их соединении в треугольник. Точно так же и пусковой вращающийся момент при соединении обмоток в звезду будет меньше пускового вращающегося момента при их соединении в треугольник в три раза.
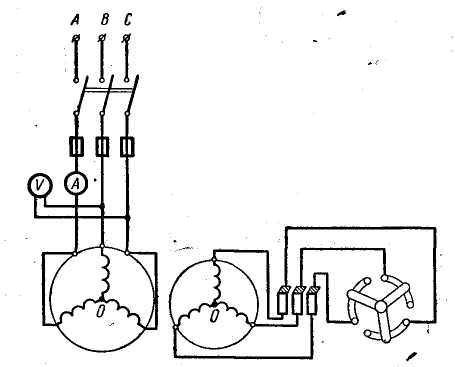
Рис. 9.17. Пуск асинхронного двигателя с контактными кольцами
В тех случаях, когда необходимо сохранить при пуске большой пусковой вращающий момент, а также при большой частоте пусков и остановок двигателя применяют асинхронные двигатели с контактными кольцами. Их пуск осуществляют при помощи пускового реостата, включенного последовательно с обмоткой ротора (рис. 9.17). Этим достигается увеличение активного сопротивления цепи ротора, что приводит, с одной стороны, к уменьшению пуско
вого тока до 1,5—2,5-кратной величины, а с другой стороны — к увеличению активной составляющей тока ротора
Процесс пуска асинхронного двигателя с контактными кольцами показан на диаграмме, приведенной на рис. 9.18. На диаграмме даны четыре кривые зависимости пускового момента от скольжения, которые соответствуют четырем фиксированным положениям пускового реостата.
В начальный момент пуска, когда пусковой реостат введен & цепь ротора двигателя полностью, начальный пусковой момент будет
Рис. 9.18. Диаграмма изменения вращающего момента в период пуска асинхронного двигателя с контактными кольцами

равен MПУСК.МАКС По мере увеличения скорости двигателя пусковой момент будет изменяться по кривой 4 до тех пор, пока не достигнет значения МПУСК.МИН. При выключении первой секции пускового реостата момент вновь возрастает до начальной величины МПУСК.МАКС и по мере сильнейшего увеличения скорости вращения ротора будет изменяться уже по кривой 3.
Когда будет выключена вторая секция пускового реостата, момент опять возрастает и станет изменяться по кривой 2. Наконец, при полностью выведенном из цепи ротора реостата, после нового его увеличения до максимальной величины, соответствующей режиму пуска, будет меняться по кривой 1 до тех пор, пока он не уравняется с моментом нагрузки. После этого величина скольжения и число оборотов установятся постоянными.
§ 9.11. Регулирование скорости вращения асинхронных двигателей и изменение направления вращения ротора
Из уравнения скорости вращения асинхронного двигателя
следует, что изменение скорости возможно путем изменения величины скольжения, изменения частоты и числа пар полюсов. У асинхронных двигателей с контактными кольцами можно изменять
скорость вращения реостатом в цепи ротора.
Частота промышленных сетей постоянна и равна 50 гц, поэтому для изменения частоты сети необходимо применять специальный преобразователь частоты.
Таким образом, этот способ регулировки применим только в автономных установках, например в гребных судовых установках где генератор связан с гребным двигателем непосредственно электрическим валом. В этом случае изменение частоты синхронного генератора производится регулировкой скорости первичного двигателя. Регулировка скорости двигателя-исполнителя частоты тока возможна только в ограниченных пределах. Надо иметь в виду, что при изменении частоты будет меняться также в общем случае напряжение на зажимах, поток, ток холостого хода, момент, мощность и т.д.
Регулировка скорости вращения при помощи регулировочного реостата у асинхронного двигателя с контактными кольцами основана на увеличении активного сопротивления цепи ротора, что приводит к увеличению скольжения и, следовательно, уменьшению скорости вращения (рис. 9.18, кривые 2, 3 и 4).
Дополнительное активное сопротивление в цепи ротора вызывает уменьшение тока I2 и соответственно уменьшение вращающего момента М. Скорость вращения двигателя начинает падать, а скольжение увеличивается. В то же время э.д.с. E2S=Е'2S
возрастает, что приводит к увеличению тока I2' до его прежней величины. Момент М уравнивается со статическим моментом МCТ, уменьшение скорости прекращается, и двигатель начинает вращаться с постоянной скоростью, несколько меньшей, чем начальная. Основным недостатком этого способа регулирования скорости вращения асинхронного двигателя является уменьшение к. п. д. двигателя пропорционально уменьшению скорости. При незначительных нагрузках, когда момент двигателя близок к моменту холостого хода, пределы регулирования скорости вращения ограничены.
Этот способ также мало экономичен, так как связан со значительным увеличением потерь в роторной цепи. Реостат должен быть рассчитан на полный рабочий ток и поэтому иметь значительные
габариты и массу.
У двигателей с короткозамкнутым ротором наиболее распространен способ регулирования скорости изменением числа пар полюсов обмотки статора. При этом способе регулирования скорости вращения можно получить только ступенчатое изменение синхронной скорости, например две ступени с отношением скоростей 2:1.
Промышленностью изготовляются двигатели двух- трех- и четырехскоростные.
Для получения различного числа пар полюсов у вращающегося магнитного поля каждая фазная обмотка двигателя подразделяется на две одинаковые части — полуобмотки. При различном соединении полуобмоток между собой, параллельно или последовательно, в них меняется направление токов, а значит и создаваемых ими магнитных полей.
На рис. 9.19 показаны схемы соединения полуобмоток одной фазы, при котором число полюсов вращающегося поля машины изменяется в отношении 2:1. Как видно из схемы, при последовательном согласном соединении секций обмоток фаз число полюсов вдвое больше, чем при параллельном или последовательном встречном их соединении.
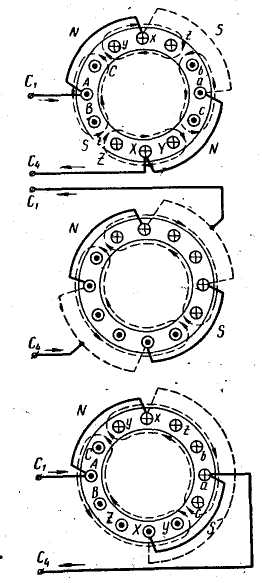
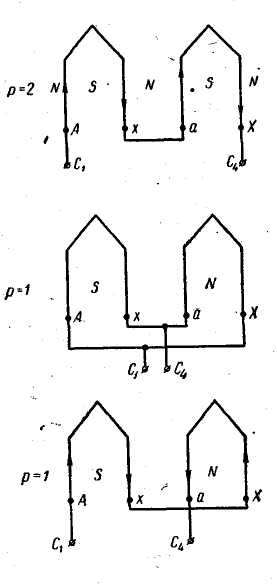
Рис. 9.19. Схема переключения обмотки статора на четыре и на два полюса
Соединительные проводники с передней стороны машины показаны сплошными линиями, а с задней стороны — штриховыми. Потоки в магнитной цепи также показаны штриховыми линиями. Таким образом, при последовательном согласном включении ка-
тушек скорость вращения магнитного поля
Недостатком этого способа регулирования числа оборотов является ступенчатость изменения скоростей.
Надо иметь в виду, что при постоянном моменте нагрузки на валу двигателя при переключении обмотки статора на меньшее
число полюсов (параллельное соединение катушек) с увеличением скорости увеличивается и мощность двигателя, так как
Н
Регулирование скорости двигателей переключением числа пар полюсов возможно лишь в двигателе с короткозамкнутым ротором, так как только у этого двигателя число полюсов ротора всегда соответствует числу полюсов статора.
Изменение направления вращения асинхронного двигателя (реверсирование) производится переключением любых двух линейных питающих проводов, при помощи переключателя. При таком переключении двух любых фаз изменится порядок чередования фаз, а следовательно, и направление вращения вращающегося магнитного поля. Ротор двигателя, следуя за вращающимся магнитным полем, также изменит направление своего вращения.
§ 9.12. Асинхронные двигатели специального назначения
С целью улучшения пусковых свойств короткозамкнутые роторы асинхронных двигателей иногда выполняются с двойной беличьей клеткой или глубоким пазом.
Ротор с двойной беличьей клеткой имеет две самостоятельные короткозамкнутые обмотки (беличьи клетки): внешнюю 1 — пусковую — с большим активным и малым индуктивным сопротивлениями и внутреннюю 2 — рабочую — с малым активным и большим индуктивным сопротивлениями (рис. 9.20, а). Индуктивное сопротивление рабочей обмотки особенно велико при пуске, когда частота тока в роторе близка к частоте сети.
Первая обмотка является пусковой, вторая — рабочей. В начале пуска, когда величина скольжения близка к единице, частота тока в роторе близка к частоте сети. Поэтому и индуктивное сопротивление рабочей обмотки будет особенно велико при малом активном сопротивлении. Ток в рабочей обмотке будет сдвинут по фазе относительно наведенной в этой обмотке э. д. с. на угол, близкий к 90°, и поэтому создавать вращающего момента не будет.
В то же время в пусковой обмотке при ее малом индуктивном и большом активном сопротивлениях ток практически будет совпадать